一种基于磁致伸缩原理的速度感应型建筑工程升降设备的制作方法
1.本发明属于建筑施工升降机技术领域,具体是指一种基于磁致伸缩原理的速度感应型建筑工程升降设备。
背景技术:
2.高层建筑工程施工中,常用建筑升降机垂直运送施工人员和建筑材料,由于升降机使用或人员管理不当等原因,施工过程中经常发生重大安全事故,而且往往是群伤群亡事故,严重影响了施工人员的人身安全和工程进度。
3.现有的建筑升降机,轿厢底部与地面之间缺少缓冲物,轿厢下降速度过快时轿厢底部会与地面产生强烈冲击,不仅容易造成人员受伤、建材散落,而且轿厢容易损坏,影响其使用寿命;目前建筑升降机的制动功能不足,在提升单元出现故障后,容易造成轿厢坠落,导致升降机安全度严重不足;在出现轿厢坠落事故后,现有的建筑升降机往往不具备必要的防护单元对轿厢进行防护,一旦出现轿厢坠落就不可避免的造成人员伤亡;建筑升降机提升期间,机械传动结构间的摩擦力较大,不仅增加了提升难度,而且造成了不必要的电力浪费。
技术实现要素:
4.针对上述情况,为克服现有技术的缺陷,本发明提出了一种安全度高、稳定性强、高效节能的基于磁致伸缩原理的速度感应型建筑工程升降设备,解决了现有建筑升降设备安全度严重不足的问题。
5.本发明采取的技术方案如下:本发明提出了一种基于磁致伸缩原理的速度感应型建筑工程升降设备,包括稳固驱动升降组件,稳固驱动升降组件包括升降装置、支撑防护装置、轿厢和滑动板,轿厢设于滑动板上,升降装置设于滑动板的顶部,滑动板设于支撑防护装置上;压动式磁流体减震缓冲组件,压动式磁流体减震缓冲组件设于轿厢的正下方,压动式磁流体减震缓冲组件包括磁流体缓冲装置、弹性支撑装置和支撑柱,支撑柱设于磁流体缓冲装置的两侧,弹性支撑装置设于磁流体缓冲装置和支撑柱的中间;风压激励式速度感应防护组件,风压激励式速度感应防护组件设于压动式磁流体减震缓冲组件的上方,风压激励式速度感应防护组件包括外挂式风力发电组件、速度感应组件和防护气囊,外挂式风力发电组件设于轿厢的底壁上,速度感应组件设于外挂式风力发电组件的一侧,速度感应组件的底端与支撑柱的底端平齐,防护气囊设于轿厢的正下方;以及,气动收缩型涡流制动组件,气动收缩型涡流制动组件设于轿厢的底壁上,气动收缩型涡流制动组件包括涡流制动装置、气压驱动装置和壳体,壳体设于轿厢的底壁上,气压驱动装置设于壳体内,涡流制动装置穿过气压驱动装置。
6.作为本发明的一种优选方案,其中:磁流体缓冲装置包括柔性接触垫、活塞杆、永磁铁一、承压腔、橡胶弹簧和永磁铁二,柔性接触垫设于活塞杆的上端,永磁铁一设于活塞杆的下端,活塞杆从承压腔内伸出,橡胶弹簧设于承压腔的底壁上,橡胶弹簧正对于永磁铁
一设置,永磁铁二环绕布置设于橡胶弹簧的外围。
7.作为本发明的一种优选方案,其中:弹性支撑装置包括压缩腔、内圈隔板、外圈隔板、充气腔、充气管和支撑气囊,压缩腔和充气腔环绕布置设于承压腔的外围,充气腔设于压缩腔的上方,内圈隔板和外圈隔板设于压缩腔的侧壁上,充气管的一端与充气腔连接,充气管的另一端与支撑气囊连接,支撑气囊设于支撑柱上,承压腔和压缩腔内充满磁流体。
8.作为本发明的一种优选方案,其中:外挂式风力发电组件包括风筒、定子、转子、转轴一和扇叶,风筒设于轿厢的底壁上,转轴一的一端与轿厢的底壁连接,转轴一的另一端与扇叶连接,定子设于风筒的内壁上,转子设于转轴一上,转轴一可自由转动。
9.作为本发明的一种优选方案,其中:速度感应组件包括波导管、磁环浮子、固定臂、信号处理器和固定顶板,波导管的顶端与固定顶板连接,波导管的底端与信号处理器连接,波导管穿过磁环浮子,磁环浮子可以沿着波导管下上滑动,固定臂的一端与轿厢连接,固定臂的另一端与磁环浮子连接。
10.作为本发明的一种优选方案,其中:涡流制动装置包括弹性杆帽、复位弹簧、伸缩杆、永磁磁极和电枢线圈,伸缩杆的一端与弹性杆帽连接,伸缩杆的另一端与永磁磁极连接,复位弹簧套装于伸缩杆上,电枢线圈设于永磁磁极上。
11.作为本发明的一种优选方案,其中:气压驱动装置包括信号接收器、高压气体存储箱、控制阀、导气管和空腔,高压气体存储箱设于壳体内,控制阀设于高压气体存储箱上,导气管的一端与控制阀连接,导气管的另一端与空腔连接,信号接收器设于壳体的底壁上。
12.作为本发明的一种优选方案,其中:升降装置包括驱动电机、减速器、转轴二、齿轮、齿条、卡接板、定滚珠、动滚珠和缓冲体,驱动电机固定连接设于滑动板上,减速器的一端与驱动电机连接,减速器的另一端与转轴二连接,齿轮设于转轴二上,齿条与齿轮保持啮合连接,卡接板设于滑动板的两侧,定滚珠设于卡接板的侧壁上,缓冲体设于滑动板的侧壁上,动滚珠设于缓冲体上,定滚珠和动滚珠可以自由滚动。
13.作为本发明的一种优选方案,其中:缓冲体包括安装块、永磁铁三、永磁铁四、限位弹簧、压缩弹簧和悬挂壳,悬挂壳滑动板的侧壁上,永磁铁四设于悬挂壳的内壁上,安装块从悬挂壳内伸出,永磁铁三设于的安装块一端,永磁铁三设于悬挂壳内,限位弹簧环绕布置设于安装块的外围,压缩弹簧的一端与永磁铁三连接,压缩弹簧的另一端与悬挂壳的内壁连接。
14.作为本发明的一种优选方案,其中:支撑防护装置包括斜坡、防护架和主架体,斜坡设于防护架的侧边底部,主架体设于防护架内。
15.作为本发明的一种优选方案,其中:齿条设于主架体上。
16.优选地,轿厢内设有中央控制器,实现设备的升降和制动等功能,中央控制器型号为stc12c6082。
17.本发明提出的一种安全度高、稳定性强、高效节能的基于磁致伸缩原理的速度感应型建筑工程升降设备的有益效果如下:(1)基于气压和液压结原理,使用磁流体替代传统的液压油作为液压介质,利用永磁铁提供稳定磁场,在无需外加电源和驱动单元的情况下,利用内圈隔板和外圈隔板对磁流体产生阻尼力,增大了磁流体的减震缓冲强度。
18.(2)在无任何气泵和驱动单元的条件下,利用轿厢下降时对柔性接触垫产生的挤
压力,实现了对支撑气囊的快速充气,使支撑气囊能够快速膨胀来缓冲轿厢落地产生的冲击力。
19.(3)当轿厢下降时,利用自然风压,带动转子旋转切割磁感线从而产生电能,将产生的电能输送至波导管后,利用磁致伸缩原理,使磁环浮子下降时被波导管产生的外磁场磁化,从而产生沿着波导管快速传递的扭力波,基于前后两次接收到的扭力波信号,可精确计算得到轿厢的下降速度,从而判断出是否有必要采取紧急制动或防护措施,而且利用风压发电还节约了电力资源,达到了节能减排的效果。
20.(4)当轿厢快速下降时,在无任何驱动单元的条件下,永磁磁极与主架体之间形成涡流,该涡流在轿厢下降方向的反方向形成制动力,减缓轿厢下降速度,当轿厢下降速度逐渐降低时,永磁磁极产生的涡流制动力逐渐减小,此时再利用电枢线圈产生辅助励磁电流进行正向激励,维持制动力水平。
21.(5)卡接板上的定滚珠和动滚珠,可以有效降低卡接板上升期间与主架体之间的摩擦力,降低轿厢上升期间的能量消耗。
22.(6)利用缓冲体内部永磁铁三和永磁铁四之间的排斥力,可有效缓冲轿厢升降过程中与主架体之间产生的冲击力,减小轿厢的晃动幅度,提高设备的整体安全性。
23.(7)当轿厢发生坠落时,地面的防护气囊可快速膨胀,降低轿厢落地产生的冲击力,起到防护作用。
24.(8)限位弹簧和压缩弹簧可以有效降低永磁铁三受到强压力,同时避免永磁铁三在强压力作用下接触到永磁铁四,从而产生碰撞造成自身损坏。
附图说明
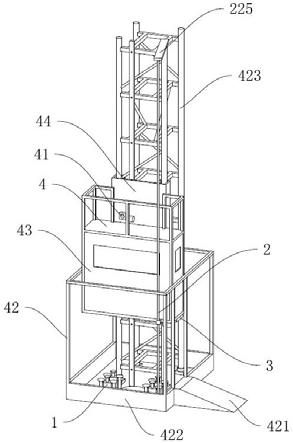
25.图1为本发明提出的一种基于磁致伸缩原理的速度感应型建筑工程升降设备的整体结构示意图a;图2为本发明提出的一种基于磁致伸缩原理的速度感应型建筑工程升降设备的整体结构示意图b;图3为本发明提出的一种基于磁致伸缩原理的速度感应型建筑工程升降设备的整体结构示意图c;图4为本发明提出的压动式磁流体减震缓冲组件的整体结构示意图;图5为本发明提出的速度感应组件的整体结构示意图a;图6为图5的a部分的局部放大图;图7为本发明提出的外挂式风力发电组件的整体结构示意图;图8为本发明提出的气动收缩型涡流制动组件的立体图;图9为本发明提出的气动收缩型涡流制动组件的整体结构示意图;图10为本发明提出的升降装置的整体结构示意图;图11为本发明提出的升降装置的俯视图;图12为图11的b部分的局部放大图;图13为本发明提出缓冲体的整体结构示意图;图14为本发明提出的一种基于磁致伸缩原理的速度感应型建筑工程升降设备的原理框图;
图15为本发明提出的一种基于磁致伸缩原理的速度感应型建筑工程升降设备的模块电路图;图16为本发明提出的信号处理器的电路图;图17为本发明提出的一种基于磁致伸缩原理的速度感应型建筑工程升降设备的电机驱动电路图。
26.其中,1、压动式磁流体减震缓冲组件,11、磁流体缓冲装置,111、柔性接触垫,112、活塞杆,113、永磁铁一,114、承压腔,115、橡胶弹簧,116、永磁铁二,12、弹性支撑装置,121、压缩腔,122、内圈隔板,123、外圈隔板,124、充气腔,125、充气管,126、支撑气囊,13、支撑柱,2、风压激励式速度感应防护组件,21、外挂式风力发电组件,211、风筒,212、定子,213、转子,214、转轴一,215、扇叶,22、速度感应组件,221、波导管,222、磁环浮子,223、固定臂,224、信号处理器,225、固定顶板,23、防护气囊,3、气动收缩型涡流制动组件,31、涡流制动装置,311、弹性杆帽,312、复位弹簧,313、伸缩杆,314、永磁磁极,315、电枢线圈,32、气压驱动装置,321、信号接收器,322、高压气体存储箱,323、控制阀,324、导气管,325、空腔,33、壳体,4、稳固驱动升降组件,41、升降装置,411、驱动电机,412、减速器,413、转轴二,414、齿轮,415、齿条,416、卡接板,417、定滚珠,418、动滚珠,419、缓冲体,4191、安装块,4192、永磁铁三,4193、永磁铁四,4194、限位弹簧,4195、压缩弹簧,4196、悬挂壳,42、支撑防护装置,421、斜坡,422、防护架,423、主架体,43、轿厢,44、滑动板。
27.在图15的中央控制器的电路图中,+5v为电路的供电电源,gnd为接地端,xtal1为晶振,c7和c8为晶振的起振电容,p1为驱动电机与中央控制器的连接口,36为信号处理器与中央控制器的连接口,37为信号接收器与中央控制器的连接口;在图16的信号处理器的电路图中,r1-r7为电阻,c1-c6为电容器,ina128ua/2k5为仪表放大器,max4527为芯片,op37gsz为运算放大器,tl712cpwr为模拟比较器,sn74ls221dr为单稳态多谐振荡器;在图17的电机驱动电路图中,bts7970b为直流电机驱动芯片,r8-r17为电阻,c9和c10为滤波电容,d1和d2为二极管,motor为电机。
28.附图用来提供对本发明的进一步理解,并且构成说明书的一部分,与本发明的实施例一起用于解释本发明,并不构成对本发明的限制。
具体实施方式
29.下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例;基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
30.作为本发明的一个新的实施例,如图1-图3所示,本发明提出了一种基于磁致伸缩原理的速度感应型建筑工程升降设备,包括稳固驱动升降组件4,稳固驱动升降组件4包括升降装置41、支撑防护装置42、轿厢43和滑动板44,轿厢43设于滑动板44上,升降装置41设于滑动板44的顶部,滑动板44设于支撑防护装置42上;压动式磁流体减震缓冲组件1,压动式磁流体减震缓冲组件1设于轿厢43的正下方,压动式磁流体减震缓冲组件1包括磁流体缓冲装置11、弹性支撑装置12和支撑柱13,支撑柱13设于磁流体缓冲装置11的两侧,弹性支撑装置12设于磁流体缓冲装置11和支撑柱13的中间;风压激励式速度感应防护组件2,风压激
励式速度感应防护组件2设于压动式磁流体减震缓冲组件1的上方,风压激励式速度感应防护组件2包括外挂式风力发电组件21、速度感应组件22和防护气囊23,外挂式风力发电组件21设于轿厢43的底壁上,速度感应组件22设于外挂式风力发电组件21的一侧,速度感应组件22的底端与支撑柱13的底端平齐,防护气囊23设于轿厢43的正下方;以及,气动收缩型涡流制动组件3,气动收缩型涡流制动组件3设于轿厢43的底壁上,气动收缩型涡流制动组件3包括涡流制动装置31、气压驱动装置32和壳体33,壳体33设于轿厢43的底壁上,气压驱动装置32设于壳体33内,涡流制动装置31穿过气压驱动装置32。
31.如图4所示,磁流体缓冲装置11包括柔性接触垫111、活塞杆112、永磁铁一113、承压腔114、橡胶弹簧115和永磁铁二116,柔性接触垫111设于活塞杆112的上端,永磁铁一113设于活塞杆112的下端,活塞杆112从承压腔114内伸出,橡胶弹簧115设于承压腔114的底壁上,橡胶弹簧115正对于永磁铁一113设置,永磁铁二116环绕布置设于橡胶弹簧115的外围;弹性支撑装置12包括压缩腔121、内圈隔板122、外圈隔板123、充气腔124、充气管125和支撑气囊126,压缩腔121和充气腔124环绕布置设于承压腔114的外围,充气腔124设于压缩腔121的上方,内圈隔板122和外圈隔板123设于压缩腔121的侧壁上,充气管125的一端与充气腔124连接,充气管125的另一端与支撑气囊126连接,支撑气囊126设于支撑柱13上,承压腔114和压缩腔121内充满磁流体。
32.如图7所示,外挂式风力发电组件21包括风筒211、定子212、转子213、转轴一214和扇叶215,风筒211设于轿厢43的底壁上,转轴一214的一端与轿厢43的底壁连接,转轴一214的另一端与扇叶215连接,定子212设于风筒211的内壁上,转子213设于转轴一214上,转轴一214可自由转动。
33.如图1、图5和图6所示,速度感应组件22包括波导管221、磁环浮子222、固定臂223、信号处理器224和固定顶板225,波导管221的顶端与固定顶板225连接,波导管221的底端与信号处理器224连接,波导管221穿过磁环浮子222,磁环浮子222可以沿着波导管221下上滑动,固定臂223的一端与轿厢43连接,固定臂223的另一端与磁环浮子222连接。
34.如图8和图9所示,涡流制动装置31包括弹性杆帽311、复位弹簧312、伸缩杆313、永磁磁极314和电枢线圈315,伸缩杆313的一端与弹性杆帽311连接,伸缩杆313的另一端与永磁磁极314连接,复位弹簧312套装于伸缩杆313上,电枢线圈315设于永磁磁极314上;气压驱动装置32包括信号接收器321、高压气体存储箱322、控制阀323、导气管324和空腔325,高压气体存储箱322设于壳体33内,控制阀323设于高压气体存储箱322上,导气管324的一端与控制阀323连接,导气管324的另一端与空腔325连接,信号接收器321设于壳体33的底壁上。
35.如图10、图11和图12所示,升降装置41包括驱动电机411、减速器412、转轴二413、齿轮414、齿条415、卡接板416、定滚珠417、动滚珠418和缓冲体419,驱动电机411固定连接设于滑动板44上,减速器412的一端与驱动电机411连接,减速器412的另一端与转轴二413连接,齿轮414设于转轴二413上,齿条415与齿轮414保持啮合连接,卡接板416设于滑动板44的两侧,定滚珠417设于卡接板416的侧壁上,缓冲体419设于滑动板44的侧壁上,动滚珠418设于缓冲体419上,定滚珠417和动滚珠418可以自由滚动。
36.如图13所示,缓冲体419包括安装块4191、永磁铁三4192、永磁铁四4193、限位弹簧4194、压缩弹簧4195和悬挂壳4196,悬挂壳4196滑动板44的侧壁上,永磁铁四4193设于悬挂
壳4196的内壁上,安装块4191从悬挂壳4196内伸出,永磁铁三4192设于的安装块4191一端,永磁铁三4192设于悬挂壳4196内,限位弹簧4194环绕布置设于安装块4191的外围,压缩弹簧4195的一端与永磁铁三4192连接,压缩弹簧4195的另一端与悬挂壳4196的内壁连接。
37.如图1所示,支撑防护装置42包括斜坡421、防护架422和主架体423,斜坡421设于防护架422的侧边底部,主架体423设于防护架422内。
38.如图1所示,齿条415设于主架体423上。
39.优选地,轿厢43内设有中央控制器,实现设备的升降和制动等功能,中央控制器型号为stc12c6082。
40.具体使用时,用户首先通过斜坡421进入到轿厢43内,然后驱动电机411启动,驱动电机411动过减速器412带动转轴二413转动,转轴二413带动齿轮414转动,齿轮414二在齿条415的配合下带动滑动板44和轿厢43一同上升,滑动板44上升时,卡接板416上的定滚珠417和动滚珠418与主架体423的侧边柱体贴合,可减小上升的阻力,降低能耗,同时缓冲体419内部永磁铁三4192和永磁铁四4193之间产生的排斥力,可有效缓冲轿厢43升降过程中与主架体423之间产生的冲击力,减小轿厢43的晃动幅度,当轿厢43到达指定高度后,驱动电机411停止,施工人员从轿厢43内走出即可达到指定楼层,当轿厢43下降时,轿厢43底部接触到柔性接触垫111后,活塞杆112受压向下移动,活塞杆112带动永磁铁一113向下移动,承压腔114内充满磁流体,磁流体受压后流向压缩腔121内,此时永磁铁一113和永磁铁二116能够提供稳定磁场,在无需外加电源和驱动单元的情况下,利用内圈隔板122和外圈隔板123对磁流体产生阻尼力,增大了磁流体的减震缓冲强度,承压腔114内磁流体流向压缩腔121的同时,充气腔124的空气受压通过充气管125进入到支撑气囊126内,支撑气囊126迅速膨胀对上方的轿厢43形成弹性支撑,当轿厢43下降期间驱动电机411发生故障导致轿厢43快速下降时,首先轿厢43底部的扇叶215受风压作用开始转动,扇叶215带动转轴一214转动,转轴一214带动转子213旋转切割磁感线从而产生电能,并将产生的电能输送至波导管221,利用磁致伸缩原理,使磁环浮子222下降时被波导管221产生的外磁场磁化,产生沿着波导管221快速传递的扭力波,基于前后两次接收到的扭力波信号,信号处理器224可精确计算得到轿厢43的下降速度,第一次接收到扭力波的时间为t1,第二次接收到扭力波的时间为t2,扭力波波速为v1,可计算得到轿厢43在一个脉冲信号周期内的下降距离s=(t1-t2)v1,脉冲信号发射周期为t3,脉冲信号发射周期为t3可在轿厢静止条件下测得(需给波导杆提供电源),此时可计算得到轿厢43的下降速度v2=s/t3=(t1-t2)v1/t3,中央控制器根据轿厢43的下降速度判断是否需要采取相应的制动或防护功能,当轿厢43下降速度达到制动极限速度时,中央控制器启动制动功能,信号接收器321接收到制动信号后,控制阀323打开,高压气体存储箱322内的高压气体通过导气管324流入到空腔325内,内外气压差带动伸缩杆313伸出,使两侧的永磁磁极314逐渐靠近并接触到主架体423,此时在无任何驱动单元的条件下,永磁磁极314与主架体423之间形成涡流,该涡流在轿厢43下降方向的反方向形成制动力,减缓轿厢43下降速度,当轿厢43下降速度由制动极限速度逐渐降低时,永磁磁极314产生的涡流制动力逐渐减小,此时再利用电枢线圈315产生辅助励磁电流进行正向激励,维持制动力水平,当启动制动功能后轿厢43的下降速度仍未降低甚至继续升高时,中央控制器发出命令启动防护气囊23,防护气囊23膨胀在地面对快速降落的轿厢43形成弹性支撑防护,以上便是本发明整体的工作流程,下次使用时重复此步骤即可。
41.需要说明的是,在本文中,诸如第一和第二等之类的关系术语仅仅用来将一个实体或者操作与另一个实体或操作区分开来,而不一定要求或者暗示这些实体或操作之间存在任何这种实际的关系或者顺序。而且,术语“包括”、“包含”或者其任何其他变体意在涵盖非排他性的包含,从而使得包括一系列要素的过程、方法、物品或者设备不仅包括那些要素,而且还包括没有明确列出的其他要素,或者是还包括为这种过程、方法、物品或者设备所固有的要素。
42.尽管已经示出和描述了本发明的实施例,对于本领域的普通技术人员而言,可以理解在不脱离本发明的原理和精神的情况下可以对这些实施例进行多种变化、修改、替换和变型,本发明的范围由所附权利要求及其等同物限定。
43.以上对本发明及其实施方式进行了描述,这种描述没有限制性,附图中所示的也只是本发明的实施方式之一,实际的结构并不局限于此。总而言之如果本领域的普通技术人员受其启示,在不脱离本发明创造宗旨的情况下,不经创造性的设计出与该技术方案相似的结构方式及实施例,均应属于本发明的保护范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1