货箱转移系统的制作方法
本发明涉及仓储,具体地,涉及一种货箱转移系统。
背景技术:
1、机器人可接受指令或系统预先设置的程序,自动执行货物转移、搬运等操作。相关技术中,机器人能够实现一次搬运多个货箱,且将货箱置于机器人的不同层的暂存机构上。在机器人转移货箱时,机器人将货箱从不同暂存机构上取出,并放置在目标位置。
2、然而,相关技术中,机器人转移货箱时,需要将货箱逐个从不同暂存机构上取出。换言之,机器人转移货箱时,只能一次转移一个货箱,转运效率低,为满足输送线效率要求,需投入更多的机器人,增大了投入成本。
技术实现思路
1、本发明旨在至少在一定程度上解决相关技术中的技术问题之一。为此,本发明的实施例提出一种货箱转移系统,该系统提高了转移效率,降低了投入成本。
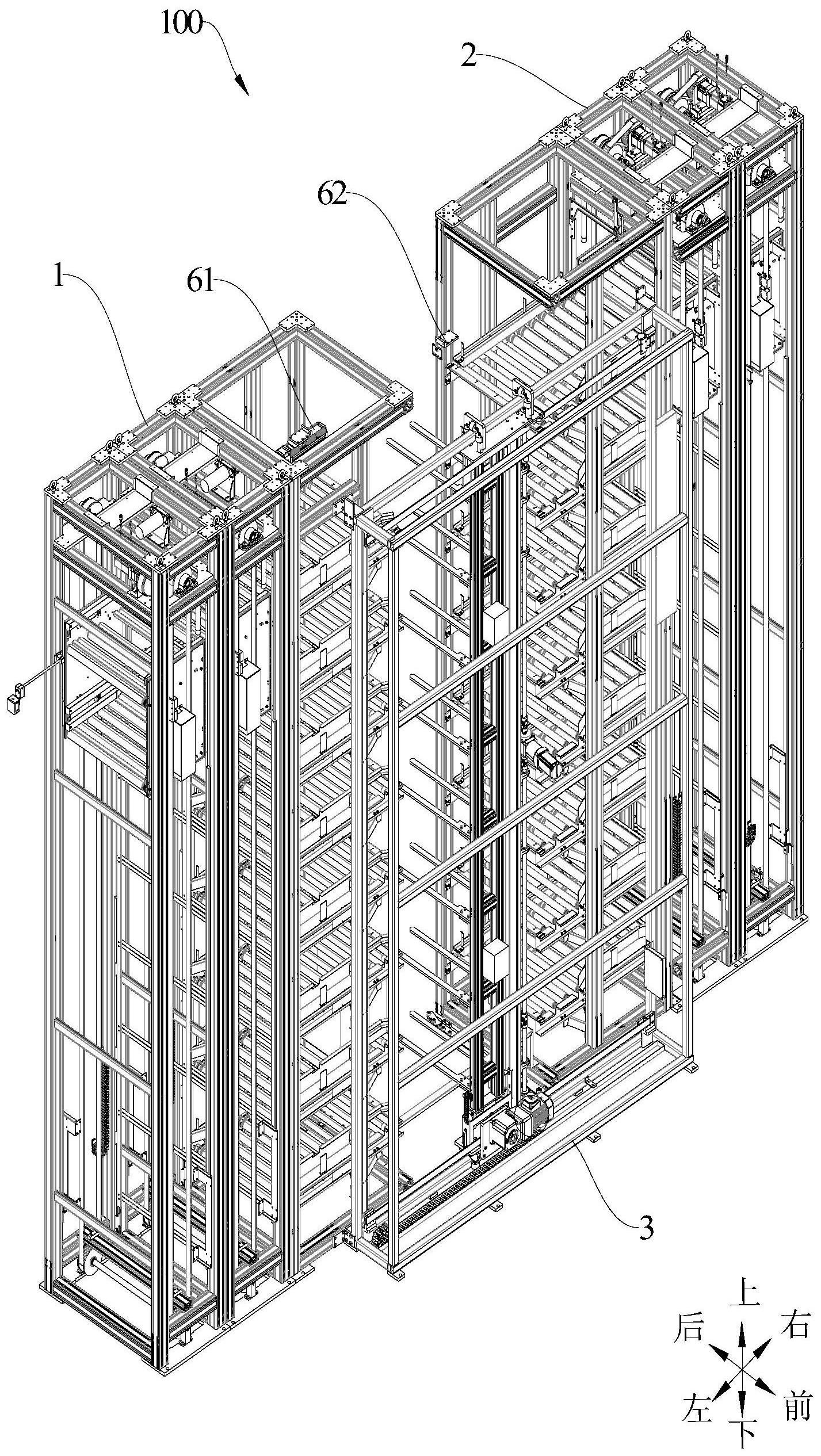
2、本发明实施例的货箱转移系统包括:
3、机器人,所述机器人具有多层暂存机构,所述暂存机构用于暂存货箱;
4、第一输送装置,所述第一输送装置具有多层第一输送机构,多层所述第一输送机构与多层所述暂存机构对应,所述第一输送机构用于输送货箱;
5、第二输送装置,所述第二输送装置和所述第一输送装置在第一方向上间隔布置,所述机器人可位于所述第一输送装置和所述第二输送装置之间,所述第二输送装置具有多层第二输送机构,多层所述第二输送机构与多层所述暂存机构对应,所述第二输送机构用于输送货箱;
6、转移装置,所述转移装置位于所述第一输送装置和所述第二输送装置的同一侧,且所述转移装置用于将多层所述暂存机构上的货箱转移到对应的第一输送机构和/或第二输送机构上,或者,将多层所述第一输送机构和/或第二输送机构上的货箱转移到对应的所述暂存机构上。
7、本发明实施例的货箱转移系统,通过转移装置一次可以转移多个货箱,转运效率高,转移货箱的成本低。
8、在一些实施例中,所述转移装置包括:
9、支架;
10、转移组件,所述转移组件设在所述支架上,所述转移组件相对于所述支架可沿所述第一方向移动,以分别与所述第一输送机构和所述第二输送机构相对,所述转移组件相对于所述支架可沿所述支架的高度方向移动,以将所述暂存机构上的货箱转移到所述转移组件上或将所述转移组件上的货箱放置在所述第一输送机构或所述第二输送机构上,且所述转移组件包括多个沿所述支架的高度方向间隔布置的对接件,多个所述对接件与多个所述第一输送机构、多个所述第二输送机构、多个所述暂存机构对应。
11、在一些实施例中,所述支架包括导轨组件,所述转移组件还包括移动件和支撑件,所述移动件设在所述导轨组件上且沿所述导轨组件在所述第一方向上移动,所述支撑件与所述移动件相连且相对于所述移动件可沿所述支架的高度方向移动,所述对接件设在所述支撑件上。
12、在一些实施例中,所述转移装置还包括第一驱动组件,所述第一驱动组件与所述移动件相连用于驱动所述移动件沿所述导轨组件在所述第一方向上移动。
13、在一些实施例中,所述第一驱动组件包括:
14、同步带,所述同步带与所述支架相连;
15、带轮,所述带轮与所述移动件相连且相对于所述移动件可转动,所述带轮与所述同步带啮合且可沿所述同步带在所述第一方向上移动;
16、第一驱动电机,所述第一驱动电机与所述带轮相连以驱动所述带轮转动。
17、在一些实施例中,所述同步带包括第一同步带和第二同步带,所述第一同步带和所述第二同步带在所述支架的高度方向上间隔布置,所述带轮包括第一带轮和第二带轮,所述第一带轮和所述第二带轮均与所述移动件相连且相对于所述移动件可转动,所述第一带轮与所述第一同步带啮合,所述第二带轮与所述第二同步带啮合,所述第一驱动电机与所述第一带轮和所述第二带轮相连。
18、在一些实施例中,所述第一驱动组件还包括:
19、第一主动轴,所述第一主动轴沿所述支架的高度方向延伸且与所述第一驱动电机和所述第一带轮相连,所述第一主动轴与所述移动件相连且相对于所述移动件可转动;
20、第二主动轴,所述第二主动轴沿所述支架的高度方向延伸且与所述第一主动轴在所述支架的高度方向上依次布置,所述第二主动轴与所述第一驱动电机和所述第二带轮相连,所述第二主动轴与所述移动件相连且相对于所述移动件可转动。
21、在一些实施例中,所述第一驱动组件还包括:
22、第一联轴器,所述第一主动轴包括多个第一轴段,相邻所述第一轴段通过所述第一联轴器相连;
23、和/或,第二联轴器,所述第二主动轴包括多个第二轴段,相邻所述第二轴段通过所述第二联轴器相连。
24、在一些实施例中,所述转移装置还包括第二驱动组件,所述第二驱动组件用于驱动所述支撑件相对于所述移动件沿所述支架的高度方向移动。
25、在一些实施例中,所述第二驱动组件包括:
26、转动件和传动件,所述转动件相对于所述传动件可转动,所述转动件的外周具有凸出部,所述凸出部可与所述支撑件抵接和远离;
27、第二驱动电机,所述第二驱动电机与所述传动件相连以驱动所述转动件转动。
28、在一些实施例中,所述第二驱动组件还包括摆轴,所述摆轴的轴向与所述转动件的轴向平行,所述摆轴与所述凸出部相连,所述摆轴的外周面可与所述支撑件抵接和远离。
29、在一些实施例中,所述第一输送装置还包括第一提升机构,所述第一提升机构包括第一运输组件,所述第一运输组件用于接收外部货箱并将所述货箱转移到多层所述第一输送机构上或接收所述第一输送机构输送的货箱;
30、和/或,所述第二输送装置还包括第二提升机构,所述第二提升机构包括第二运输组件,所述第二运输组件用于接收外部货箱并将所述货箱转移到多层所述第二输送机构上或接收所述第二输送机构输送的货箱。
31、在一些实施例中,所述第一输送装置还包括第三提升机构,所述第三提升机构包括第三运输组件,所述第三运输组件用于接收所述第一运输组件提供的货箱并将所述货箱转移到多层所述第一输送机构上或接收多层所述第一输送机构上的货箱并将所述货箱转移到所述第一运输组件上;
32、和/或,所述第二输送装置还包括第四提升机构,所述第四提升机构包括第四运输组件,所述第四运输组件用于接收所述第二运输组件提供的货箱并将所述货箱转移到多层所述第二输送机构上或接收多层所述第二输送机构上的货箱并将所述货箱转移到所述第二运输组件上。
33、在一些实施例中,所述货箱转移系统包括检测组件,所述检测组件设在所述第一输送机构、所述第二输送机构、第一运输组件、所述第二运输组件中的至少一个上,所述检测组件用于检测是否有异物和/或所述货箱是否到位。
34、在一些实施例中,所述检测组件包括:
35、第一检测件,所述第一检测件用于检测所述货箱在输送过程中是否到位;和/或
36、第二检测件,所述第二检测件位于所述第一检测件在所述货箱的输送方向上的一侧,所述第二检测件用于检测所述货箱的位置以及是否有异物,所述第二检测件和所述第一检测件在所述输送方向上的距离小于所述货箱在所述输送方向上的尺寸。
37、在一些实施例中,所述第二检测件为至少两个,至少两个所述第二检测件沿所述货箱的高度方向间隔布置。
38、在一些实施例中,所述检测组件还包括第三检测件,所述第三检测件位于所述第一检测件在所述输送方向上的另一侧,所述第三检测件用于检测所述货箱的位置以及是否有异物,所述第三检测件和所述第一检测件在所述输送方向上的距离小于所述货箱在所述输送方向上的尺寸。
39、在一些实施例中,所述第三检测件为至少两个,至少两个所述第三检测件沿所述货箱的高度方向间隔布置。
40、在一些实施例中,所述第二检测件和所述第三检测件在所述输送方向上的距离为所述货箱在所述输送方向上的尺寸的1.1倍-1.9倍。
41、在一些实施例中,所述货箱转移系统还包括导向装置,所述导向装置设在所述第一输送装置和所述第二输送装置之间,以用于导引所述机器人移动。
42、在一些实施例中,所述导向装置包括在所述第一方向上相对且间隔布置的第一导向组件和第二导向组件,所述第一导向组件邻近所述第一输送装置布置,所述第二导向组件邻近所述第二输送装置布置,所述机器人可位于所述第一导向组件和所述第二导向组件之间。
43、在一些实施例中,所述第一导向组件和所述第二导向组件中的每一者包括基板和导向板,所述导向板设在所述基板上且相对于所述基板在所述第一方向上位置可调,所述机器人可位于所述第一导向组件的导向板和所述第二导向组件的导向板之间且可沿所述导向板的长度方向移动。
44、在一些实施例中,所述基板上设有沿所述第一方向间隔布置的第一定位孔,所述导向板上设有沿所述第一方向延伸且沿所述导向板的厚度方向贯穿所述导向板的第二定位孔,
45、所述第一导向组件和所述第二导向组件中的每一者还包括紧固件,所述紧固件可穿过所述第二定位孔和任意一个所述第一定位孔以连接所述基板和所述导向板。
46、在一些实施例中,所述第一导向组件和所述第二导向组件中的每一者还包括止挡件,所述止挡件设在所述基板上且与所述导向板抵接,所述第一导向组件中,所述止挡件位于所述导向板远离所述第二导向组件的一侧,所述第二导向组件中,所述止挡件位于所述导向板远离所述第一导向组件的一侧。
47、在一些实施例中,所述止挡件为多个,多个所述止挡件沿所述基板的长度方向间隔布置。
48、在一些实施例中,所述第一导向组件和所述第二导向组件中的每一者还包括多个导向轮,多个所述导向轮设在所述导向板远离所述基板的一侧,多个所述导向轮沿所述导向板的长度方向间隔布置,所述导向轮可与所述导向板共同作用以引导所述机器人移动。
49、在一些实施例中,所述货箱转移系统还包括定位装置,所述定位装置设在所述第一输送装置和/或第二输送装置上,用于对所述机器人进行定位。
50、在一些实施例中,所述定位装置包括在所述第一方向上相对且间隔布置的第一定位组件和第二定位组件,所述第一定位组件设在所述第一输送装置上,所述第二定位组件设在所述第二输送装置上,所述第一定位组件的至少部分和所述第二定位组件的至少部分可相向或背向移动,以在所述机器人停止时对所述机器人进行定位。
51、在一些实施例中,所述第一定位组件和所述第二定位组件中的每一者包括第三驱动电机、传动组件和定位板,所述第三驱动电机与所述传动组件相连,所述传动组件与所述定位板相连以带动所述定位板在所述第一方向上移动。
52、在一些实施例中,所述第一定位组件和所述第二定位组件中的每一者还包括基座和安装板,所述第三驱动电机、所述传动组件和所述定位板设在所述基座上,所述安装板设在所述基座的底部,所述第一定位组件的安装板与第一输送装置相连,所述第二定位组件的安装板和所述第二输送装置相连。
- 还没有人留言评论。精彩留言会获得点赞!