一种橡胶片自动收集摆片装置的制作方法
1.本发明涉及一种橡胶片自动收集摆片装置,属于橡胶片挤出设备领域。
背景技术:
2.橡胶片挤出生产工艺过程中,挤出的胶片需要冷却加隔布收藏,现有技术中进行加隔布收料分层码料过程(简称摆片)采取的是人工操作方式。存在的问题是工人劳动强度大、生产效率低下。
3.本发明结合物联网技术、同时应智能化工厂的要求,设计一种橡胶片自动收集摆片装置,实现橡胶片摆片工序机械化、自动化和智能化。
技术实现要素:
4.本发明需要解决的技术问题是提供一种橡胶片自动收集摆片装置,解决了橡胶挤出工艺过程中胶片摆片工序劳动强度大和生产效率低的问题,实现了摆片工序的自动化。
5.为解决上述技术问题,本发明所采用的技术方案是:
6.一种橡胶片自动收集摆片装置,包括执行机构和控制执行机构完成自动控制及数据交换的控制单元,所述执行机构包括将从胶片挤出机挤出的胶片沿z方向运输至收料位且通过向下翻转将胶片落料的开合带式放料装置、接收从开合带式放料装置上卸落的胶片并将其沿x方向运出的双工位码放车、通过可翻转式物料层板实现胶片的储存的百叶式胶片储运车以及通过双层梳状接料手将码好成垛的胶片从双工位码放车搬导至百叶式胶片储运车上的可识别高度搬导机械手,开合带式放料装置将胶片落至双工位码放车上后,隔布铺设装置将隔布铺设于双工位码放车上的胶片上等待下一个胶片的落下进行胶片的码垛。
7.本发明技术方案的进一步改进在于:所述开合带式放料装置包括第一机架和水平设置于第一机架上部使胶片沿z方向运输的带式收料机,且第一机架的上部安装有能够转动的梁架;
8.所述带式收料机包括一端安装于梁架上、另一端悬空的主动轴和从动轴,所述主动轴和从动轴的外部套设有带动转动的传输带;所述带式收料机沿x方向并列设置为两套,且主动轴和从动轴的非铰接端相邻,所述主动轴的铰接端与电机连接,且电机与控制单元信号连接;
9.所述开合带式放料装置还包括带动梁架转动继而带动两套带式收料机的相邻侧向下翻转打开的翻转机构。
10.本发明技术方案的进一步改进在于:所述翻转机构包括分别设置于带式收料机运输方向的两端、能够沿x方向的正负方向同时伸缩的开合气缸,且开合气缸与控制单元信号连接,所述开合气缸两端的伸缩杆端部分别铰接有带动梁架转动的回转臂机构;
11.所述回转臂机构包括纵截面呈“7”字型、底部与梁架固定的第一回转臂和底部与第一回转臂的顶部固定、顶部与开合气缸伸缩杆的端部铰接的第二回转臂,所述第一回转
臂和第二回转臂的连接端铰接于第一机架上,且开合气缸的伸缩杆伸出时,带式收料机的主动轴和从动轴呈水平方位;开合气缸的伸缩杆收回时,带式收料机的主动轴和从动轴的非铰接端向下翻转至最低点;所述第一回转臂和第二回转臂的夹角为钝角。
12.本发明技术方案的进一步改进在于:所述双工位码放车包括设置于开合带式放料装置下方、沿x方向安装有直线导轨的第二机架和通过长行程气缸沿直线导轨往复移动的双工位码放车本体;
13.所述双工位码放车本体包括间隔一定距离设置且同步移动使得其一位于收料位时另一位于出料位的第一码放车和第二码放车,所述第一码放车与第二码放车的顶部分别设置能够向远离另一码放车的方向滑动伸出的梳排状推料手和伸缩杆端部固定于梳排状推料手上、带动梳排状推料手伸出收回的第一伸缩气缸,第一伸缩气缸与控制单元信号连接,所述梳排状推料手为多根方条状料杆均匀间隔排列固定而成。
14.本发明技术方案的进一步改进在于:所述直线导轨平行间隔设置为两组;所述长行程气缸设置为四个,其中两个长行程气缸分布于两组直线导轨之间、伸缩杆朝向一侧,另两个长行程气缸分布于两组直线导轨外侧、伸缩杆朝向另一侧,所述长行程气缸与控制单元信号连接。
15.本发明技术方案的进一步改进在于:所述隔布铺设装置包括设置于带式收料机与双工位码放车的收料位之间、通过水平方位带动沿z方向平行移动的移动横杆,所述移动横杆两侧的下端设置有用于吸附放置于升降平台上的隔布的电磁铁;所述升降平台通过步进电机实现升降来补偿电磁铁与隔布之间的距离;所述步进电机、水平方位和电磁铁分别与控制单元信号连接。
16.本发明技术方案的进一步改进在于:所述可识别高度搬导机械手包括第三机架和设置于第三机架上通过电机和升降丝杠运动副带动沿y方向上下移动的移动架,移动架上设置有通过第二伸缩气缸和往复平移运动副带动沿x方向水平往复移动的双层梳状接料手;所述双层梳状接料手包括一侧固定呈一定高度的顶层梳状接料手和底层梳状接料手,且顶层梳状接料手和底层梳状接料手分别由多根方条状料杆均匀间隔固定而成,双层梳状接料手的固定侧设置于第二转动轴上,且第二转动轴的两端分别设置有提供动力带动双层梳状接料手翻转180
°
的旋转摆动气缸;旋转摆动气缸、第二伸缩气缸和电机分别与控制单元信号连接。
17.本发明技术方案的进一步改进在于:所述可识别高度搬导机械手沿x方向的外侧设置胶片输送至百叶式胶片储运车后、阻挡胶片跟随双层梳状接料手退回的翻板挡料辅助机构;所述翻板挡料辅助机构包括第四机架,第四机架靠近可识别高度搬导机械手的一侧、位于z方向的两端分别设置有顶部通过电机带动转动的丝杠,丝杠的一侧设置有导向立柱;所述丝杠和导向立柱上铰接有沿y方向上下移动、用于阻挡胶片的齿形挡料杆,所述齿形挡料杆呈长条状设置、其上均匀间隔分布有顶部突出的挡料块;所述电机与控制单元信号连接。
18.本发明技术方案的进一步改进在于:所述百叶式胶片储运车包括立板与底板垂直设置为“l”状的车架、设置于车架底板下的脚轮、均匀间隔铰接于车架立板上能够掀起和放平的多层物料层板、以及一端固定于物料层板上另一端固定于立板上的辅助弹簧,所述辅助弹簧设置于每层物料层板的两侧且在立板上的固定端高于物料层板的铰接端,每层所述
物料层板非铰接端设置有平放时起支撑作用的定位立柱,所述车架立板的顶端设置有两个向物料层板倾斜一定角度且端部向下弯折的挡杆;
19.每层所述物料层板表面的四个边的中部分别设置有起阻挡作用的限位块,所述车架的两侧还设置有推拉扶手,推拉扶手的一端固定于底板上、另一端固定于立板上。
20.本发明技术方案的进一步改进在于:所述第四机架靠近百叶式胶片储运车的一侧、位于z方向的两端分别设置有机架立杆,所述机架立杆上从上至下依次间隔设置有与物料层板一一对应、且伸缩杆能够转动90度的转角下压气缸,转角下压气缸伸缩杆端部设置有与伸缩杆垂直、跟随伸缩杆转动用于将掀起的物料层板放下的旋转下压杆,所述转角下压气缸与控制单元信号连接;
21.所述第四机架位于z方向的两侧还安装有用于将百叶式胶片储运车拉进和推出第四机架内部的拉力气缸,且拉力气缸伸缩杆的端部设置有用于锁紧推拉扶手的卡扣;同时第四机架上还设置有感应开关,所述感应开关和拉力气缸分别与控制单元信号连接。
22.由于采用了上述技术方案,本发明取得的技术进步是:
23.本发明解决了橡胶挤出工艺过程中胶片摆片工序劳动强度大和生产效率低的问题,实现了橡胶片摆片工序的机械化、自动化和智能化,提高了生产效率。
附图说明
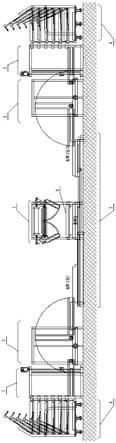
24.图1是本发明主视结构示意图;
25.图2是本发明图1的部分示意图;
26.图3是本发明俯视结构示意图;
27.图4是本发明图3的部分示意图;
28.图5是本发明开合带式放料装置和隔布铺设装置的主视示意图;
29.图6是本发明开合带式放料装置的俯视示意图;
30.图7是本发明开合带式放料装置的局部俯视示意图;
31.图8是本发明开合带式放料装置中回转臂机构示意图;
32.图9是本发明双工位码放车俯视示意图;
33.图10是本发明双工位码放车主视示意图;
34.图11是本发明可识别高度搬导机械手和翻板挡料辅助机构主视示意图;
35.图12是本发明可识别高度搬导机械手和翻板挡料辅助机构俯视示意图;
36.图13是本发明翻板挡料辅助机构的结构示意图;
37.图14是本发明百叶式胶片储运车主视示意图;
38.图15是本发明百叶式胶片储运车俯视示意图;
39.图16是本发明开合气缸的结构示意图;
40.其中,1、开合带式放料装置,101、第一机架,102、带式收料机,102-1、主动轴,102-2、从动轴,102-3、传输带,103、翻转机构,103-1、开合气缸,103-2、回转臂机构,103-2-1、第一回转臂,103-2-2、第二回转臂,104、梁架,2、双工位码放车,201、第二机架,202、直线导轨,203、第一码放车,204、第二码放车,205、梳排状推料手,206、第一伸缩气缸,207、长行程气缸,3、可识别高度搬导机械手,301、第三机架,302、升降丝杠运动副,303、第二伸缩气缸,304、旋转摆动气缸,305、双层梳状接料手,306、第二转动轴,4、百叶式胶片储运车,401、车
架,402、脚轮,403、物料层板,404、推拉扶手,405、定位立柱,406、限位块,407、辅助弹簧,408、挡杆,5、电机,6、隔布铺设装置,601、移动横杆,602、电磁铁,603、升降平台,7、翻板挡料辅助机构,701、第四机架,702、丝杠,703、齿形挡料杆,704、转角下压气缸。
具体实施方式
41.下面结合实施例对本发明做进一步详细说明:其中,本发明的气路控制均是由控制单元通过plc控制器通讯联系。
42.如图1~4所示,一种橡胶片自动收集摆片装置,包括执行机构和控制执行机构完成自动控制及数据交换的控制单元,能够实现摆片工序的自动化。
43.所述执行机构包括开合带式放料装置1、双工位码放车2、可识别高度搬导机械手3、百叶式胶片储运车4、翻板挡料辅助机构和隔布铺设装置6。
44.开合带式放料装置1将从胶片挤出机挤出的胶片沿z方向运输至收料位,通过向下翻转将胶片落料至双工位码放车2,隔布铺设装置6将隔布铺设于双工位码放车2上的胶片上等待下一个胶片的落下,双工位码放车2接收卸落的胶片并将其沿x方向运出;可识别高度搬导机械手3通过双层梳状接料手将码好成垛的胶片从双工位码放车搬导至百叶式胶片储运车4上来实现胶片的储存和运输;同时翻板挡料辅助机构能够阻挡胶片跟随双层梳状接料手305退回,使得胶片料垛卸落至百叶式胶片储运车4。这个过程循环重复多次,直至百叶式胶片储运车4装满为止。
45.如图5~7所示,开合带式放料装置包括第一机架101,第一机架101的上部水平设置有使胶片沿z方向运输的带式收料机102。带式收料机102包括一端铰接于梁架104上、另一端悬空的主动轴102-1和从动轴102-2,主动轴102-1和从动轴102-2的外部套设有传输带,主动轴102-1铰接于梁架104的一端与电机5的转动轴连接,电机5带动主动轴102-1转动,进而使得传输带沿z方向运输。带式收料机102沿x方向对称布置、并列设置为两套,主动轴102-1和从动轴102-2的非铰接端相邻,两套并列设置的带式收料机102共同运输胶片。两套带式收料机102的电机5分别与控制单元信号连接,通过控制单元实现同步转动。
46.翻转机构103包括分别设置于带式收料机102运输方向(即z方向)的两端的两个开合气缸103-1,如图16所示,开合气缸103-1为双杆双向第一伸缩气缸,压缩空气接口(同时也是两个缸腔连通共有的接口)位于气缸中部,使得伸缩杆能够沿x方向的正负方向同时伸缩,两端的伸缩杆端部分别铰接有带动梁架104转动的回转臂机构103-2,进而带动两套带式收料机102的相邻侧同时向相反方向翻转,使带式收料机102中间位置形成开口状态,停在带式收料机102上的胶片凭自重落下,将胶片平缓的落到已经铺设了隔布上面的双工位码放车2上,实现胶片的落料。
47.如图8所示,回转臂机构103-2包括纵截面呈“7”字型的第一回转臂103-2-1,第一回转臂103-2-1的底部与梁架104固定、顶部与第二回转臂103-2-2的底部固定,第二回转臂103-2-2的顶部与开合气缸103-1伸缩杆的端部铰接,运动位角为45-115度。并且第二回转臂103-2-2与第一回转臂103-2-1的横臂之间的夹角为钝角,且两者为一体设置,两者的连接点铰接于第一机架101上,为开合转动回转中心。
48.开合气缸103-1的伸缩杆伸出时,第一回转臂103-2-1的横臂呈水平方位,此时带式收料机102的主动轴102-1和从动轴102-2呈水平方位,即带式收料机102此时处于运输胶
片的状态;开合气缸103-1的伸缩杆收回时,以第一回转臂103-2-1和第二回转臂103-2-2的连接点为转动点带动第一回转臂103-2-1向外翻转,继而通过梁架104带动带式收料机102的主动轴102-1和从动轴102-2的非铰接端向下翻转至最低点,此时两套带式收料机102处于打开位置、胶片落料的状态。
49.位于运输方向两端的开合气缸103-1的伸缩杆分别通过回转臂机构103-2与梁架104的两端连接,两端的开合气缸103-1分别与控制单元信号连接,通过控制单元实现同步伸缩,进而带动两套带式收料机102翻转开合落料。
50.如图9和10所示,双工位码放车2包括设置于开合带式放料装置1下方的第二机架201,第二机架201上沿x方向平行间隔安装有两组直线导轨202,双工位码放车本体沿直线导轨202进行往复移动。开合带式放料装置1的正下方为收料位,沿x方向的两侧分别为出料工位ⅰ和出料工位ⅱ。
51.双工位码放车本体包括间隔一定距离设置的第一码放车203和第二码放车204,当第一码放车203位于收料位时,第二码放车204位于出料工位ⅱ;当第二码放车204位于收料位时,第一码放车203位于出料工位ⅰ。
52.第一码放车203和第二码放车204的往复移动通过四个长行程气缸207实现。长行程气缸207设置为四个,其中两个长行程气缸207分布于两组直线导轨202之间、伸缩杆朝向一侧,另两个长行程气缸207分布于两组直线导轨202外侧、伸缩杆朝向另一侧。所述第一码放车203和第二码放车204通过直线导轨202内外两组的长行程气缸207互为推拉形成往复换位。长行程气缸207的伸缩杆端部通过球头关节与第一码放车203和第二码放车204连接,并联结成一体实现动作同步。并且长行程气缸207与控制单元信号连接,通过控制单元实现同步伸缩带动第一码放车203和第二码放车204往复移动。
53.第一码放车203和第二码放车204的顶部分别设置能够向远离另一码放车的方向滑动伸出的梳排状推料手205,梳排状推料手205为方条状料杆均匀间隔设置而成,并通过横杆或横块固定在一起。梳排状推料手205的动力通过设置于第二机架201上的第一伸缩气缸206带动梳排状推料手205的伸出收回,第一伸缩气缸206伸缩杆端部固定于梳排状推料手205上且第一伸缩气缸206与控制单元信号连接。
54.如图3和图5所示,所述隔布铺设装置6包括设置于第一机架101上的且能够沿z方向平行移动的移动横杆601,移动横杆601位于双工位码放车的收料位的上方,且通过气缸带动移动。所述双工位码放车收料位的一侧沿z方向设置放置有隔布的升降平台603,隔布的两个宽边均设置有一条含铁粉的磁性胶条。所述移动横杆601两侧的下端设置有用于吸附放置于升降平台603上的隔布的电磁铁602。所述步进电机、水平方位和电磁铁602分别与控制单元信号连接。
55.水平方位带动移动横杆601沿z方向平行移动至升降平台603的上方,升降平台603通过步进电机实现升降来补偿电磁铁602与隔布之间的距离使得电磁铁602吸住隔布上的胶条,然后水平方位通过带动移动横杆601进而带动隔布移动至双工位码放车收料位的上方,控制单元控制电磁铁断电,则隔布落下平铺至胶片上。
56.如图11和12所示,可识别高度搬导机械手3包括设置有能够沿y方向上下移动的移动架的第三机架301,所述移动架通过电机5和升降丝杠运动副302带动沿y方向上下移动。移动架上设置有通过第二伸缩气缸303和往复平移运动副带动沿x方向水平往复移动的双
层梳状接料手305,使得双层梳状接料手305能够y方向上下移动达到不同高度的物料层板403,同时还能沿x方向水平移动,将胶料输送至物料层板403。
57.所述双层梳状接料手305包括由方条状料杆均匀间隔固定而成的顶层梳状接料手和底层梳状接料手,其能够与双工位码放车的梳排状推料手205交叉配合,且顶层梳状接料手和底层梳状接料手的一侧固定呈一定高度,且其固定侧设置于第二转动轴306上,第二转动轴306的两端分别设置有提供动力的旋转摆动气缸304,使得双层梳状接料手305能够翻转180
°
。旋转摆动气缸304、第二伸缩气缸303和电机5分别与控制单元信号连接。
58.可识别高度搬导机械手3沿x方向的外侧还设置有翻板挡料辅助机构,即在可识别高度搬导机械手3和百叶式胶片储运车4之间的位置设置有翻板挡料辅助机构。翻板挡料辅助机构的作用有两个:一是当可识别高度搬导机械手3的双层梳状接料手305将胶片接收后、翻转输送至百叶式胶片储运车4时,翻板挡料辅助机构的齿形挡料杆703会将胶片挡住,使得胶片卸落至百叶式胶片储运车4,阻挡胶片跟随双层梳状接料手305退回;二是翻板挡料辅助机构的转角下压气缸704的伸缩杆伸出,在最后一段的伸出行程中会带动旋转下压杆旋转,在旋转的过程中旋转下压杆的端部会插入需要放下的物料层板403的顶部,同时随着向下转动将掀起的物料层板403放下。
59.所述翻板挡料辅助机构包括第四机架701,第四机架701靠近可识别高度搬导机械手3的一侧、沿z方向的两端分别设置有丝杠702,丝杠702的顶部设置有带动其转动的电机5,丝杠702的一侧设置有导向立柱;所述丝杠702和导向立柱上铰接有沿y方向上下移动、用于阻挡胶片的齿形挡料杆703,所述齿形挡料杆703呈长条状设置、其上均匀间隔分布有多个挡料块,挡料块的顶部突出,用于阻挡胶片时能够正好插入双层梳状接料手305的间隙中,起到阻挡作用。
60.第四机架701靠近百叶式胶片储运车4的一侧、沿z方向的两端分别设置有机架立杆,所述机架立杆从上至下依次间隔设置有多个转角下压气缸704,每个机架立杆上的转角下压气缸704的数量与物料层板403一一对应,转角下压气缸704的伸缩杆与圆柱面配合,圆柱面上开有一个轴向槽,轴向槽的上部沿圆柱面旋转,伸缩杆的下端设置有定位钉,正好插到轴向槽内配合滑动,当转角下压气缸704活塞直线运动时,到了轴向槽的转角处就必须跟着槽的方向走在,所以能转动一定的角度。其伸缩杆端部设置有与伸缩杆垂直、伸出后跟随伸缩杆转动用于将掀起的物料层板403放下的旋转下压杆(旋转下压杆是在伸出行程的最后一段距离才会跟随旋转,而不是伸缩杆一伸出就跟随旋转)。
61.所述第四机架701位于z方向的两侧还安装有两个拉力气缸,拉力气缸伸缩杆的端部设置有卡扣,当人工将百叶式胶片储运车4推送至指定车位进行后续收料储料时,第四机架701上设置的感应开关感应到百叶式胶片储运车4后,控制单元控制拉力气缸的伸缩杆伸出,人工将卡扣锁紧至推拉扶手404后,控制单元控制拉力气缸的伸缩杆收回,用于将百叶式胶片储运车4拉进第四机架701内部,进行后续收料储料。
62.所述电机5和转角下压气缸704分别与控制单元信号连接实现自动控制。
63.如图14和15所示,百叶式胶片储运车4包括呈“l”型设置的车架401,车架401包括底板和垂直设置于底板上的立板。底板底面设置有脚轮402,脚轮402为市面上常见的万向轮结构,能够向任意方向运动。
64.立板的一侧均匀间隔设置有多层物料层板403,物料层板403为平板结构,表面四
个边的中部分别设置有凸起的限位块406,能够对胶片起阻挡作用,防止在百叶式胶片储运车4移动时,胶片掉落。
65.物料层板403铰接于立板的一侧,能够掀起和放平,每层物料层板403的两侧设置辅助弹簧407,辅助弹簧407的一端固定于物料层板403上,另一端固定于立板上,且其固定端高于物料层板403在立板上的铰接端。物料层板403在掀起时,辅助弹簧407提供一个拉力,使得物料层板403掀起时不会掉落。立板顶端设置有两个向物料层板倾斜一定角度且端部向下弯折的挡杆408,当最顶层的物料层板403掀起时,挡杆408的端部会抵住物料层板403,配合辅助弹簧407,起到限位的作用。
66.每层物料层板403非铰接端的两个角下设置有定位立柱405,定位立柱405为杆状结构,平放时端部支撑于下层物料层板上,起支撑作用。车架401的两侧还设置有推拉扶手404,推拉扶手404的一端固定于底板上、另一端固定于立板上,方便百叶式胶片储运车4的推拉。
67.使用方法:
68.控制单元控制电机5转动,使得带式收料机102上的传输带102-3转动,此时,胶片从胶片挤出机挤出落入传输带102-3上,跟随传输带102-3传输至收料位。然后,控制单元控制开合气缸103-1的伸缩杆收回(开始时开合气缸103-1的伸缩杆伸出,传输带保持水平),则带式收料机102向下翻转至最低点,则胶片落入双工位码放车2的第一码放车203上(第一码放车203位于收料位,第二码放车204位于出料位),此时控制单元控制隔布铺设装置6的水平方位启动,使得移动横杆601向升降平台603方向移动,并且控制步进电机启动,升降平台603运动补充电磁铁602与隔布之间的距离,当移动横杆601移动到位时,控制单元控制电磁铁602通电将隔布吸住,然后带动隔布移至胶片上方,控制电磁铁602断电,则隔布掉落至胶片上方。此时,另一个胶片正好移至收料位进行落料。
69.重复上述过程,直至第一码放车203上的胶片码垛高度合格后(控制单元依据胶片厚度计算落料极限高度,以计数的方法设定高度),控制单元控制长行程气缸207运动将第一码放车203移至出料位,此时,第二码放车204移至收料位继续接收胶片。控制单元控制第一码放车203上的第一伸缩气缸206运动,使得梳排状推料手205带动胶片输送至可识别高度搬导机械手3上的双层梳状接料手305之间;同时,双层梳状接料手305也沿x方向和y方向移动来接收胶片。
70.此时,人工将百叶式胶片储运车4推送至指定车位进行后续收料储料时,第四机架701上设置的感应开关感应到百叶式胶片储运车4后,控制单元控制拉力气缸的伸缩杆伸出,人工将卡扣锁紧至推拉扶手404后,控制单元控制拉力气缸的伸缩杆收回,用于将百叶式胶片储运车4拉进第四机架701内部,进行后续收料储料。
71.然后,控制单元控制双层梳状接料手305向上移动,胶片脱离梳排状推料手205,则梳排状推料手205退回至原位。控制单元控制双层梳状接料手305翻转180度,同时移动至需要贮存和停放的物料层板403的高度,然后向物料层板403的方向移动;此时,翻板挡料辅助机构上对应的转角下压气缸704在控制单元的控制下伸出旋转将该层物料层板403放下,同时双层梳状接料手305将胶片送至该层物料层板403;然后控制单元控制齿形挡料杆703向上运动直至挡住胶片停止,双层梳状接料手305退回,由于挡料块的阻挡,胶片落至物料层板403上,完成一个自动输料摆片过程。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1