一种轻量型高曲率自适应重载轨道机器人移动机构
1.本发明涉及大型散料输送设备智能巡检机器人机构,具体地说是一种轻量型高曲率自适应重载轨道机器人移动机构。
背景技术:
2.目前,城市港口、矿山、电厂、水泥厂、煤矿以及大型输送带输送机巷道等场所中管带机、皮带机的巡视和检修工作大部分都由人工完成,伴随着人工巡检频率低、时间间隔长,不能及时发现问题导致问题扩大的风险。并且,该类场所中环境复杂、空间狭小、积水和粉尘情况常见,对人工巡视造成非常大的危害。机器人代替人工完成巡视和检修工作的优势日益突出。在管带机或皮带机运行过程中,皮带机的滚筒、托辊经常出现损坏,输送带突发纵撕、坑道积水等问题。针对上述问题,机器人首先需要能够在复杂场合的空间轨道上自如地完成爬坡和拐弯等系列运动;机器人需要携带工具箱进行高效率检测和维护。
技术实现要素:
3.为了解决现有巡检机器人存在的上述问题,本发明的目的在于提供一种轻量型高曲率自适应重载轨道机器人移动机构。
4.本发明的目的是通过以下技术方案来实现的:
5.本发明包括控制箱及置于控制箱上的移动模块,所述移动模块包括支撑手臂、行走轮机构及传动机构,所述支撑手臂的下端安装于控制箱上,所述行走轮机构与支撑手臂的上端转动连接,所述传动机构的动力部分安装于控制箱内部或安装于控制箱上,所述传动机构的输出部分与行走轮机构中的行走轮柔性连接,进而实现所述移动模块在直线型轨道及弯曲型轨道上的运动。
6.其中:所述支撑手臂包括手臂主体及旋转轴,所述手臂主体的下端固接于控制箱上,所述旋转轴的下端与手臂主体的上端转动连接,所述旋转轴的上端与行走轮机构转动连接。
7.所述手臂主体为中空结构、上端开设有连接孔,所述连接孔内容置有用于与旋转轴下端转动连接的轴承a,所述旋转轴的上端通过轴承c与行走轮机构上设置的机构连接孔转动连接,在所述旋转轴上套设有轴承隔套,所述轴承隔套的两端分别与轴承a及机构连接孔的下表面抵接。
8.所述手臂主体上端内部固接有轴承端盖a,所述轴承a的外圈通过连接孔内壁的止口及轴承端盖a轴向限位,所述轴承a的内圈通过轴承隔套及旋转轴上的轴肩轴向限位。
9.所述行走轮机构包括行走轮支架、机构连接孔、夹爪支板及行走轮,所述行走轮支架的末端设有与支撑手臂上端转动连接的机构连接孔,所述行走轮的行走轮轴转动安装于行走轮支架上,在所述行走轮行走方向的前后两侧均设有固接于行走轮支架上的夹爪支板。
10.所述行走轮的两端分别通过轴承b与行走轮支架转动连接,所述行走轮轴两端的
行走轮支上分别固接有对轴承b轴向限位的轴承端盖b;所述行走轮轴的任意一端由行走轮支架穿出,并与所述传动机构的输出部分柔性连接。
11.所述行走轮轴与传动机构输出部分柔性连接的一端安装有隔离套。
12.所述行走轮包括行走轮轴、行走轮外框架、行走轮聚氨酯层、行走轮轴轴套及行走轮轴螺母,所述行走轮聚氨酯层的两端均设有行走轮外框架,两侧所述行走轮外框架与行走轮聚氨酯层固接为一整体,并安装于所述行走轮轴上、与所述行走轮轴连动,一侧所述行走轮外框架的外侧设有安装于行走轮轴上的行走轮轴轴套,另一侧所述行走轮外框架的外侧设有安装于行走轮轴上的行走轮轴螺母,所述行走轮轴轴套及行走轮轴螺母限定行走轮聚氨酯层与行走轮外框架整体在行走轮轴上的轴向移动。
13.所述传动机构包括驱动电机、驱动电机联轴器、链轮传动轴、链轮、链轮罩后盖、动力输出轴、挠性联轴器、链条及链轮罩,所述驱动电机作为传动机构的动力部分安装于控制箱的内部或安装于控制箱上,所述链轮罩后盖的一侧固接于控制箱上,所述链轮罩后盖的另一侧与链链罩固接;所述链轮罩后盖的下端转动连接有链轮传动轴、上端转动连接有动力输出轴,所述驱动电机的输出端通过驱动电机联轴器与链轮传动轴相连,所述动力输出轴的一端通过作为传动机构输出部分的挠性联轴器与行走轮连接,所述链轮传动轴的另一端及动力输出轴的另一端均安装有链轮,两个所述链轮之间通过链条相连,所述链轮及链条均容置于链轮罩和链轮罩后盖围成的空间内。
14.所述控制箱呈长方体或正方体,包括箱体侧板、箱体顶板及机构连接板,所述箱体侧板为对称设置的两块,所述机构连接板为对称设置的两块,所述箱体侧板与机构连接板分布于控制箱的四周,并通过螺栓固定连接;所述箱体顶板固接于箱体侧板与机构连接板的顶部,所述箱体顶板上开设有用于与支撑手臂连接的安装底孔a,任意一块所述机械连接板上开设有用于与传动机构连接的安装底孔b。
15.本发明的优点与积极效果为:
16.1.本发明结构简单、紧凑,移动平稳,环境适应性强,负载能力强,安全可靠。
17.2.本发明的行走轮机构与传动机构之间采用了柔性连接,在两者间进行动力传递的过程中时,可以发生所需角度的位姿变化;本发明的移动模块不仅能够适应不同线径的直线型轨道,而且能够很好地适应具有高曲率特性的弯曲型轨道。
18.3.本发明的行走轮机构通过支撑手臂与控制箱连接,移动机构的重力由支撑手臂承担,可实现大自重比(自重比达到1:20)。
19.4.本发明的行走轮采用阔线设计,增加本发明对不同线径轨道的适应性,实现了本发明在不同线径轨道上的高效率的运动。
附图说明
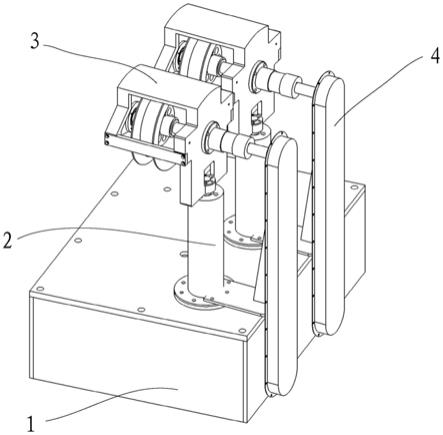
20.图1为本发明的整体结构示意图;
21.图2为本发明移动模块的结构示意图
22.图3为本发明控制箱的结构示意图;
23.图4为本发明支撑手臂的结构示意图;
24.图5为本发明行走轮机构的结构示意图;
25.图6为本发明行走轮的结构示意图;
26.图7为本发明传动机构的示意图;
27.图8为本发明在直线型轨道上的工作状态图;
28.图9为本发明在弯曲型轨道上的工作状态图;
29.其中:1为控制箱,101为箱体侧板,102为箱体顶板,103为安装底孔a,104为机构连接板,105为安装底孔b,2为支撑手臂,201为连接法兰,202为手臂主体,203为轴承端盖a,204为轴承a,205为轴承隔套,206为旋转轴,3为行走轮机构,301为行走轮支架,302为机构连接孔,303为夹爪支板,304为行走轮,3041为行走轮轴,3042为行走轮外框架,3043为行走轮聚氨酯层,3044为行走轮轴轴套,3045为行走轮轴螺母,305为轴承b,306为轴承端盖b,307为隔离套,4为同步带传动机构,401为驱动电机,402为驱动电机联轴器,403轴承座,404为轴承隔离套,405为链轮传动轴,406为链轮,407为链轮罩后盖,408为动力输出轴,409为挠性联轴器,410为链条,411为驱动电机连接板,412为链轮罩,5为轨道。
具体实施方式
30.下面结合附图对本发明作进一步详述。
31.如图1~7所示,本发明包括控制箱1及置于控制箱1上的移动模块,本实施例的移动模块为结构相同的两组,对称置于控制箱1上,用于在轨道5上的移动和转向。本实施例的移动模块包括支撑手臂2、行走轮机构3及传动机构4,支撑手臂2的下端安装于控制箱1上,行走轮机构3与支撑手臂2的上端转动连接,传动机构4的动力部分安装于控制箱1内部或安装于控制箱1上,传动机构4的输出部分与行走轮机构3中的行走轮304柔性连接;支撑手臂2用于提供支撑力、增加移动的稳定性;传动机构4位于控制箱1的一侧,用于提供动力;行走轮机构3设置于支撑手臂2和传动机构4的末端,用于在轨道上的行走和转向;通过支撑手臂、行走轮机构3及传动机构4的配合,进而实现移动模块在直线型及弯曲型轨道上的平稳运动。
32.如图1、图2及图3所示,本实施例的控制箱1呈长方体或正方体,包括箱体侧板101、箱体顶板102及机构连接板104,箱体侧板101为对称设置的两块,机构连接板104为对称设置的两块,箱体侧板101与机构连接板104分布于控制箱1的四周,并通过螺栓固定连接;箱体顶板102固接于箱体侧板101与机构连接板104的顶部,箱体顶板102上开设有用于与支撑手臂2连接的安装底孔a103,任意一块机械连接板104上开设有用于与传动机构4连接的安装底孔b105。
33.支撑手臂2主要用于承受轨道机器人作业模块的重力,使得移动模块的负载能力为自身重力的10倍。如图1~4所示,本实施例的支撑手臂2包括连接法兰201、手臂主体202、轴承端盖a203、轴承a204、轴承隔套205及旋转轴206,手臂主体202为空心圆柱体,下端设有连接法兰201,连接法兰201通过安装底孔a103与控制箱1的箱体顶板102固定连接;手臂主体202的上端开设有连接孔,连接孔内容置有轴承a204,旋转轴206的下端与轴承a204转动连接。旋转轴206的上端与行走轮机构3上设置的机构连接孔302转动连接,在旋转轴206上套设有轴承隔套205,轴承隔套205的两端分别与轴承a204及机构连接孔302的下表面抵接。手臂主体202上端内部通过螺栓固接有轴承端盖a203,轴承a204的外圈通过连接孔内壁的止口及轴承端盖a203轴向限位,轴承a204的内圈通过轴承隔套205及旋转轴206上的轴肩轴向限位。
34.如图1~5所示,本实施例的行走轮机构3包括行走轮支架301、机构连接孔302、夹爪支板303、行走轮304、轴承b305、轴承端盖b306及隔离套307,行走轮支架301的末端设有机构连接孔302,机构连接孔302为光孔,旋转轴206的上端由机构连接孔302穿过,并通过套设在旋转轴206上的垫片轴向限位,进而实现旋转轴206与机构连接孔302的转动连接;行走轮304的行走轮轴3041转动安装于行走轮支架301上,在行走轮304行走方向的前后两侧均设有通过螺栓固接于行走轮支架301上的夹爪支板303,两侧的夹爪支板303对称设置。本实施例的行走轮轴3041的两端分别通过轴承b305与行走轮支架301转动连接,行走轮轴3041两端的行走轮支架301上分别固接有对轴承b305轴向限位的轴承端盖b306;行走轮轴3041的任意一端由行走轮支架301穿出,并与传动机构4的输出部分柔性连接。行走轮轴3041与传动机构4输出部分柔性连接的一端安装有隔离套307。
35.如图1~6所示,本实施例的行走轮304包括行走轮轴3041、行走轮外框架3042、行走轮聚氨酯层3043、行走轮轴轴套3044及行走轮轴螺母3045,行走轮聚氨酯层3043的两端均设有行走轮外框架3042,两侧行走轮外框架3042与行走轮聚氨酯层3043固接为一整体,并安装于行走轮轴3041上、与行走轮轴3041连动,一侧行走轮外框架3042的外侧设有安装于行走轮轴3041上的行走轮轴轴套3044,另一侧行走轮外框架3042的外侧设有安装于行走轮轴3041上的行走轮轴螺母3045,行走轮轴轴套3044及行走轮轴螺母3045限定行走轮聚氨酯层3043与行走轮外框架3042整体在行走轮轴3041上的轴向移动。
36.如图1~7所示,本实施例的传动机构4包括驱动电机401、驱动电机联轴器402、轴承座403、轴承隔离套404、链轮传动轴405、链轮406、链轮罩后盖407、动力输出轴408、挠性联轴器409、链条410、驱动电机连接板411及链轮罩412,驱动电机401作为传动机构4的动力部分通过驱动电机连接板411安装于控制箱1的内部,驱动电机连接板411的两端均通过螺栓固接有轴承座403,每个轴承座403内均安装有轴承d,两轴承d之间的驱动电机联轴器402上设有对轴承d轴向限位的轴承隔离套404;链轮罩后盖407的一侧固接于控制箱1上,链轮罩后盖407的另一侧与链链罩412固接;链轮罩后盖407的下端转动连接有链轮传动轴405、上端转动连接有动力输出轴408,驱动电机401的输出端通过驱动电机联轴器402与链轮传动轴405相连,动力输出轴408的一端通过作为传动机构4输出部分的挠性联轴器409与行走轮304的行走轮轴3041柔性连接,隔离套307用于对行走轮轴3041与挠性联轴器409键连接后进行轴向限位;链轮传动轴405的另一端及动力输出轴408的另一端均安装有链轮406,两个链轮406之间通过链条410相连,链轮406及链条410均容置于链轮罩412和链轮罩后盖407围成的空间内。
37.本发明的工作原理为:
38.本发明的移动模块能够在不同线径的直线型轨道以及具有高曲率特性的弯曲型轨道上平稳运动。如图8、图9所示,处于工作状态时,行走轮机构3中的行走轮304采用阔线设计,增加了该行走轮304对轨道5线径的适应范围,使行走轮304与轨道5表面充分接触。此时,控制箱1的重力主要通过支撑手臂2传递给行走轮机构3,传动机构4主要通过挠性联轴器409对行走轮机构3进行动力传递,支撑手臂2的设置,增加了移动机构的稳定性。
39.本发明的移动模块面对具有高曲率特性的弯曲型轨道(曲率半径小于2m)时,设置于行走轮机构3与传动机构4之间的挠性联轴器409发生弯曲变形,行走轮机构3整体绕旋转轴206发生旋转,消除弯曲型轨道与行走轮机构3之间的夹角,增加行走轮304与轨道之间的
有效接触面积,减小了移动模块在移动过程中所受到的阻力,实现本发明的移动模块对高曲率轨道的自适应性。
40.以上所述仅为本发明的实施方式,并非用于限定本发明的保护范围。凡在本发明的精神和原则之内所作的任何修改、等同替换、改进、扩展等,均包含在本发明的保护范围内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1