一种拆垛机的制作方法
1.本发明涉及瓶子加工设备技术领域,尤其是指一种拆垛机。
背景技术:
2.在瓶子生产的过程中,为了配合整条生产线的速度配比,需要将待处理的瓶子先堆垛在托盘上,以便于将堆垛满瓶子的托盘输送至预定位置;当需要对堆垛好的瓶子进行加工处理时,此时就需要将堆垛好的瓶子拆垛成瓶子组后再输送至加工工位上。现有技术中一般是先通过推瓶机构将堆垛后的瓶子组推出,然后再通过机械手将隔板取走;采用推瓶的方式实现拆垛,拆垛稳定性差,容易导致瓶子倾倒甚至散乱,且拆垛和取放隔板的效率低。因此,缺陷十分明显,亟需提供一种解决方案。
技术实现要素:
3.为了解决上述技术问题,本发明的目的在于提供一种拆垛机。
4.为了实现上述目的,本发明采用如下技术方案:
5.一种拆垛机,其包括机架、装设于机架的扶料升降装置、装设于机架并位于扶料升降装置的一侧的瓶子输出机构、装设于机架并位于扶料升降装置的另一侧的隔板收集机构、活动设置于机架的拆垛装置、活动设置于机架的取放隔板装置及装设于机架并用于驱动拆垛装置和取放隔板装置同步地往复移动的往复驱动机构,所述拆垛装置在扶料升降装置的上方与瓶子输出机构的上方之间往复移动,所述取放隔板装置在隔板收集机构的上方与扶料升降装置的上方之间往复移动。
6.进一步地,所述拆垛装置包括与往复驱动机构的输出端驱动连接的拆垛移动架、分别转动连接于拆垛移动架的周向的多个翻转夹持板及装设于拆垛移动架的多个翻转驱动器,每个翻转驱动器用于驱动一个翻转夹持板翻转,所述拆垛移动架的底面和多个翻转夹持板能够围设成夹持空间。
7.进一步地,所述翻转夹持板包括与拆垛移动架转动连接的翻转轴、连接于翻转轴的铰接臂、连接于翻转轴的翻转臂及连接于翻转臂的板体,所述翻转驱动器的一端与拆垛移动架铰接,所述翻转驱动器的另一端与铰接臂铰接。
8.进一步地,所述取放隔板装置包括与往复驱动机构的输出端驱动连接的取放隔板移动架、装设于取放隔板移动架的取放隔板升降机构及与取放隔板升降机构的输出端连接的取放隔板吸盘组。
9.进一步地,所述扶料升降装置包括相对且平行地设置于机架内的两个扶料板、装设于机架并用于驱动两个扶料板彼此靠近或远离的扶料驱动机构、升降设置于机架的两个承托机构、装设于机架并用于驱动两个承托机构同步升降的堆垛升降机构、分别转动设置于扶料板的两侧的两组包围门及装设于机架并分别驱动两组包围门打开或闭合的两组启闭驱动机构;当两组包围门闭合时,两组包围门和两个扶料板围设成升降空间;两个承托机构分别与两个扶料板对应设置,所述扶料板的高度方向设置有承托升降槽,所述承托机构
的承托端经由承托升降槽突伸至升降空间内;当两组包围门打开时,两组包围门和两个扶料板围设成通道;所述扶料板的顶面等于或略高于瓶子输出机构的输送面。
10.进一步地,每组所述包围门均包括转动连接于扶料板的一侧或机架的包围板,每组启闭驱动机构均包括启闭驱动组件,所述启闭驱动组件包括翻转件及启闭驱动器,所述启闭驱动器的一端铰接于机架,所述启闭驱动器的输出端与翻转件的一端铰接,所述翻转件的另一端与包围板的转动连接侧固定连接,所述启闭驱动器用于驱动翻转件带动包围板翻转。
11.进一步地,所述扶料升降装置还包括装设于机架的压隔板机构,所述压隔板机构位于扶料板的顶部。
12.进一步地,所述压隔板机构包括两个压隔板组件,两个压隔板组件分别与两个扶料板一一对应设置;所述压隔板组件包括装设于机架的压隔板驱动器及装设于压隔板驱动器的输出端的压板,所述压隔板驱动器用于驱动压板移进或移出升降空间。
13.进一步地,所述扶料驱动机构包括两个扶料驱动组件,两个扶料驱动组件分别与两个扶料板驱动连接,所述扶料驱动组件包括扶料驱动器、联动杆及两组伸缩连杆组件,两组伸缩连杆组件经由联动杆连接,两组伸缩连杆组件分别位于扶料板的上部和下部,两组伸缩连杆组件分别转动连接于扶料板与机架之间,所述扶料驱动器的一端与机架铰接,扶料驱动器的另一端与其中一组伸缩连杆组件驱动连接;所述伸缩连杆组件包括转接轴及对称设置于转接轴的两个伸缩杆组,所述伸缩杆组包括第一伸缩杆及第二伸缩杆,所述第一伸缩杆的一端与扶料板铰接,第一伸缩杆的另一端与转接轴铰接,所述第二伸缩杆的一端与转接轴铰接,第二伸缩杆的另一端与机架铰接,所述联动杆的两端分别与两组伸缩连杆组件的转接轴铰接。
14.进一步地,所述承托机构包括承托组件及与堆垛升降机构的升降端连接的升降板,所述承托组件包括装设于升降板的承托驱动器及连接于承托驱动器的输出端的承托件,所述承托驱动器用于驱动承托件经由承托升降槽移进或移出升降空间。
15.本发明的有益效果:在实际应用中,人工或托盘输送机构将堆垛满瓶子的托盘输送至扶料升降装置中,扶料升降装置驱动托盘连带其上方堆垛好的瓶子(多组瓶子组堆垛在一起,相邻的两组瓶子组经由隔板间隔)上升一个瓶子组的高度,使得最顶层的瓶子组位于拆垛的位置并与拆垛装置对应,拆垛装置拾取最顶层的瓶子组后,往复驱动机构驱动拆装装置和取放隔板装置同步朝靠近瓶子输出机构的方向移动,使得拆垛装置连带瓶子组移动至瓶子输出机构的输送面上方,取放隔板装置移动至扶料升降装置的上方,然后拆垛装置松开瓶子组,瓶子输出机构将瓶子组输出至预设位置,与此同时,取放隔板装置拾取位于扶料升降装置最顶层的隔板后,往复驱动机构驱动拆垛装置和取放隔板装置同步复位移动,直至拆垛装置复位至扶料升降装置的上方,取放隔板装置连带其拾取的隔板移动至隔板收集机构的上方,并将隔板放置在隔板收集机构上进行收集,以完成一次拆垛工作,然后扶料升降装置驱动托盘连带堆垛好的瓶子整体上升一个瓶子的高度,拆垛装置即可拾取最顶层的瓶子组,重复上述拆垛的步骤,以实现不断地拆垛,直至托盘空载。本发明的自动化程度高,实现了瓶子的拆垛、输出以及隔板的收集,拆垛装置和取放隔板装置同步往复移动,在拆垛瓶子组的同时,实现隔板的取放,大大地提高了拆垛的效率,且一个驱动源(往复驱动机构)驱动两个装置(取放隔板装置和拆垛装置)同步往复移动,结构紧凑,节能环保。
附图说明
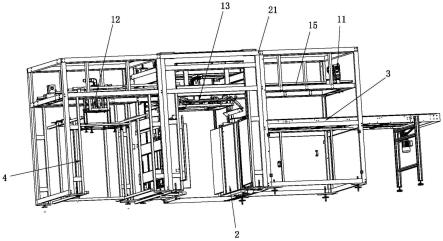
16.图1为本发明的立体结构示意图。
17.图2为本发明的往复驱动机构、取放隔板装置和拆垛装置的立体结构示意图。
18.图3为本发明的拆垛装置的立体结构示意图。
19.图4为本发明的扶料升降装置中的一个包围板处于闭合状态的立体结构示意图。
20.图5为本发明的扶料板、包围板、启闭驱动组件、扶料驱动组件和压隔板组件的立体结构示意图。
21.图6为图5中a处的放大图。
22.图7为本发明的承托机构的立体结构示意图。
23.附图标记说明:
24.11、往复驱动机构;12、取放隔板装置;121、取放隔板移动架;122、取放隔板升降机构;123、取放隔板吸盘组;13、拆垛装置;131、拆垛移动架;132、翻转夹持板;133、翻转驱动器;134、翻转轴;135、铰接臂;136、翻转臂;137、板体;14、连接杆;15、滑轨组件;2、扶料升降装置;21、机架;22、扶料板;221、承托升降槽;23、扶料驱动机构;231、扶料驱动组件;232、扶料驱动器;233、联动杆;234、伸缩连杆组件;235、转接轴;236、伸缩杆组;237、第一伸缩杆;238、第二伸缩杆;24、承托机构;241、承托组件;242、升降板;243、承托驱动器;244、承托件;25、堆垛升降机构;26、包围门;261、包围板;271、启闭驱动组件;272、翻转件;273、启闭驱动器;28、压隔板机构;281、压隔板组件;282、压隔板驱动器;283、压板;3、瓶子输出机构;4、隔板收集机构。
具体实施方式
25.为了便于本领域技术人员的理解,下面结合实施例与附图对本发明作进一步的说明,实施方式提及的内容并非对本发明的限定。
26.如图1至图7所示,本发明提供的一种拆垛机,其包括机架21、装设于机架21的扶料升降装置2、装设于机架21并位于扶料升降装置2的一侧的瓶子输出机构3、装设于机架21并位于扶料升降装置2的另一侧的隔板收集机构4、活动设置于机架21的拆垛装置13、活动设置于机架21的取放隔板装置12及装设于机架21并用于驱动拆垛装置13和取放隔板装置12同步地往复移动的往复驱动机构11,所述拆垛装置13在扶料升降装置2的上方与瓶子输出机构3的上方之间往复移动,所述取放隔板装置12在隔板收集机构4的上方与扶料升降装置2的上方之间往复移动。
27.在实际应用中,人工或托盘输送机构将堆垛满瓶子的托盘输送至扶料升降装置2中,扶料升降装置2驱动托盘连带其上方堆垛好的瓶子(多组瓶子组堆垛在一起,相邻的两组瓶子组经由隔板间隔)上升一个瓶子组的高度,使得最顶层的瓶子组位于拆垛的位置并与拆垛装置13对应,拆垛装置13拾取最顶层的瓶子组后,往复驱动机构11驱动拆装装置和取放隔板装置12同步朝靠近瓶子输出机构3的方向移动,使得拆垛装置13连带瓶子组移动至瓶子输出机构3的输送面上方,取放隔板装置12移动至扶料升降装置2的上方,然后拆垛装置13松开瓶子组,瓶子输出机构3将瓶子组输出至预设位置,与此同时,取放隔板装置12拾取位于扶料升降装置2最顶层的隔板后,往复驱动机构11驱动拆垛装置13和取放隔板装置12同步复位移动,直至拆垛装置13复位至扶料升降装置2的上方,取放隔板装置12连带其
拾取的隔板移动至隔板收集机构4的上方,并将隔板放置在隔板收集机构4上进行收集,以完成一次拆垛工作,然后扶料升降装置2驱动托盘连带堆垛好的瓶子整体上升一个瓶子的高度,拆垛装置13即可拾取最顶层的瓶子组,重复上述拆垛的步骤,以实现不断地拆垛,直至托盘空载。本发明的自动化程度高,实现了瓶子的拆垛、输出以及隔板的收集,拆垛装置13和取放隔板装置12同步往复移动,在拆垛瓶子组的同时,实现隔板的取放,大大地提高了拆垛的效率,且一个驱动源(往复驱动机构11)驱动两个装置(取放隔板装置12和拆垛装置13)同步往复移动,结构紧凑,节能环保。
28.本实施例中,所述拆垛装置13包括与往复驱动机构11的输出端驱动连接的拆垛移动架131、分别转动连接于拆垛移动架131的周向的多个翻转夹持板132及装设于拆垛移动架131的多个翻转驱动器133,每个翻转驱动器133用于驱动一个翻转夹持板132翻转,所述拆垛移动架131的底面和多个翻转夹持板132能够围设成夹持空间。
29.在实际应用中,扶料升降装置2所承载的托盘上堆垛满瓶子,最顶层的瓶子组位于拆垛装置13的拆垛位置,此时多个翻转夹持板132处于打开状态,拆垛移动架131的底面与最顶层的瓶子组的顶面抵触;拆垛时,多个翻转驱动器133分别驱动多个翻转夹持板132翻转,直至拆垛移动架131的底面和多个翻转夹持板132围设成夹持空间,瓶子组位于夹持空间内,多个翻转夹持板132闭合以将瓶子组夹持,然后往复驱动机构11驱动取放隔板装置12和拆垛装置13连带被夹持的瓶子组移动,直至被夹持的瓶子组移动至瓶子输出机构3的上方,取放隔板装置12移动至扶料升降装置2所堆垛的瓶子组上方,在多个翻转驱动器133分别驱动多个翻转夹持板132反向复位翻转,使得多个翻转夹持板132打开以释放对瓶子组的夹持,从而使得瓶子输出机构3将瓶子组输出,与此同时,取放隔板装置12拾取位于顶部位置的隔板,最后往复驱动机构11驱动拆垛装置13和取放隔板装置12连带隔板反向复位移动,直至拆垛装置13移动至扶料升降装置2的上方,取放隔板装置12连带其所拾取的隔板移动至隔板收集机构4的上方,并将隔板放置在隔板收集机构4上。通过将瓶子组夹持在夹持空间内后,再将瓶子组移送至瓶子输出机构3上,多个翻转夹持板132对瓶子组进行夹持的同时,也会对瓶子组上的瓶子与瓶子间的间距进行调整,以保证每组瓶子组的位置精度和稳定性,从而提高了拆垛瓶子组的稳定性、效率和质量。
30.本实施例中,所述翻转夹持板132包括与拆垛移动架131转动连接的翻转轴134、连接于翻转轴134的铰接臂135、连接于翻转轴134的翻转臂136及连接于翻转臂136的板体137,所述翻转驱动器133的一端与拆垛移动架131铰接,所述翻转驱动器133的另一端与铰接臂135铰接;具体地,所述翻转驱动器133可以采用气缸,所述翻转驱动器133的数量和翻转夹持板132的数量均为四个,四个翻转驱动器133呈四方形分布,且四个翻转驱动器133的输出端均朝外设置。
31.在实际应用中,翻转驱动器133的输出端伸缩以带动铰接臂135往复摆动,往复摆动的铰接臂135连带翻转轴134往复转动,往复转动的翻转轴134带动翻转臂136连带板体137往复翻转,使得翻转夹持板132往复翻转,以实现四个翻转夹持板132的打开或闭合。该结构结构简单,翻转动作灵敏,拆垛效率高。
32.本实施例中,所述取放隔板装置12包括与往复驱动机构11的输出端驱动连接的取放隔板移动架121、装设于取放隔板移动架121的取放隔板升降机构122及与取放隔板升降机构122的输出端连接的取放隔板吸盘组123;具体地,所述取放隔板升降机构122可以采用
直线驱动模组。在实际应用中,取放隔板升降机构122驱动取放隔板吸盘组123升降,取放隔板吸盘组123用于吸取或释放隔板。
33.本实施例中,所述拆垛移动架131与取放隔板移动架121经由连接杆14连接;该结构设计,保证了拆垛移动架131与取放隔板移动架121移动的同步性,移动精度高。
34.具体地,所述机架21的顶部装设有滑轨组件15,所述取放隔板装置12的取放隔板移动架121和拆垛装置13的拆垛移动架131均与滑轨组件15滑动连接。通过滑轨组件15对取放隔板装置12的取放隔板移动架121和拆垛装置13的拆垛移动架131的移动进行导向,提高了取放隔板装置12的取放隔板移动架121和拆垛装置13的拆垛移动架131移动的稳定性。
35.本实施例中,所述扶料升降装置包括相对且平行地设置于机架21内的两个扶料板22、装设于机架21并用于驱动两个扶料板22彼此靠近或远离的扶料驱动机构23、升降设置于机架21的两个承托机构24、装设于机架21并用于驱动两个承托机构24同步升降的堆垛升降机构25、分别转动设置于扶料板22的两侧的两组包围门26及装设于机架21并用于分别驱动两组包围门26打开或闭合的两组启闭驱动机构;当两组包围门26闭合时,两组包围门26和两个扶料板22围设成升降空间;两个承托机构24分别与两个扶料板22对应设置,所述扶料板22的高度方向设置有承托升降槽221,所述承托机构24的承托端经由承托升降槽221突伸至升降空间内;当两组包围门26打开时,两组包围门26和两个扶料板22围设成通道;所述扶料板22的顶面等于或略高于瓶子输出机构3的输送面。
36.在实际应用中,起始时,拆垛装置13位于扶料板22的上方,托盘输送机构贯穿扶料升降装置2的底部,使得托盘输送机构位于升降空间的底端下方,两组启闭驱动机构分别驱动两组包围门26打开,使得两组包围门26和两个扶料板22围设成通道,托盘输送机构从通道的进料端将堆垛满瓶子的托盘输送至两个扶料板22之间,然后两组启闭驱动机构驱动两组包围门26闭合,以使得两组包围门26和两个扶料板22围设成升降空间,托盘和堆垛好的瓶子位于升降空间内,然后两个承托机构24启动,两个承托机构24的承托端经由承托升降槽221突伸至升降空间内以将堆垛好瓶子的托盘承托,与此同时,扶料驱动机构23驱动两个扶料板22彼此靠近,直至两个扶料板22分别与堆垛好的瓶子的两侧抵触,当然,闭合的两组包围门26也可以分别与堆垛好的瓶子的另外两侧抵触,以使得两个扶料板22和两组包围门26均对堆垛好的瓶子进行扶持,堆垛升降机构25驱动两个承托机构24连带堆垛好瓶子的托盘同步上升,当托盘上的最顶层的瓶子组上升至扶料板22的上方后,拆垛装置13会将该瓶子组推送至瓶子输出机构3上,取放隔板装置12会将隔板拾取至隔板收集机构4上,以实现一次拆垛工作,每拆垛一层瓶子组,堆垛升降机构25驱动两个承托机构24连带堆垛好瓶子的托盘同步上升一层瓶子组的高度,直至拆垛完成,托盘空载,此时堆垛升降机构25驱动两个承托机构24连带空载的托盘下降并复位,直至托盘与托盘输送机构抵触,扶料驱动机构23驱动两个扶料板22彼此远离并复位,两个启闭驱动机构分别驱动两组包围门26打开,两组包围门26和两个扶料板22围设成通道,两个承托机构24释放对空载的托盘的承托,托盘输送机构不但将空载的托盘从通道的出料端输出,还将堆垛好的托盘从通道的进料端输入,以实现自动化的供应料盘和输出料盘;重复上述的拆垛步骤,以不断地进行拆垛工作。由于在托盘上升的过程中,两组包围门26和两个扶料板22分别对堆垛层的四周进行抵触并扶持,所以不但提高了堆垛层的位置精度,还保证了堆垛层在上升时的稳定性,且不会因堆垛层的数量多或上升速度过快而导致出现堆垛层摇晃等不稳定的问题。该结构设计,不但
便于托盘的输入和输出,还提高了托盘所堆垛的瓶子在升降过程中的稳定性,避免瓶子出现倾倒或散乱的现象,提高了拆垛的稳定性,特别适用于自动化生产线中。
37.本实施例中,每组所述包围门26均包括转动连接于扶料板22的一侧或机架21的包围板261,每组启闭驱动机构均包括启闭驱动组件271,所述启闭驱动组件271包括翻转件272及启闭驱动器273,所述启闭驱动器273的一端铰接于机架21,所述启闭驱动器273的输出端与翻转件272的一端铰接,所述翻转件272的另一端与包围板261的转动连接侧固定连接,所述启闭驱动器273用于驱动翻转件272带动包围板261翻转;具体地,所述启闭驱动器273可以采用气缸。在实际应用中,启闭驱动器273的输出端伸缩以驱动翻转件272往复翻转,往复翻转的翻转件272带动包围板261往复翻转,以使得包围板261能够打开或闭合;翻转的角度范围在0
°
到90
°
之间,当包围板261打开时,包围板261与扶料板22共面设置;当包围板261闭合时,包围板261与扶料板22垂直设置。
38.具体地,所述包围板261的数量和启闭驱动组件271的数量均为两个,两个扶料板22、两个包围板261和两个启闭驱动组件271分别一一对应设置,两个启闭驱动组件271分别驱动两个包围板261彼此闭合或打开。该结构设计,包围门26为双叶门结构,实现了包围门26的模块化,缩小了包围门26翻转所需占用的空间,提高了包围门26打开或闭合的效率,从而提高了生产效率。
39.本实施例中,所述扶料升降装置2还包括装设于机架21的压隔板机构28,所述压隔板机构28位于扶料板22的顶部。在拆垛装置13将最顶层的瓶子组推送至瓶子输出机构3之前,压隔板机构28工作,以将最顶层的瓶子组的下方的隔板进行按压,避免隔板跟随瓶子组移动而发生位置的偏移,提高了隔板的位置精度和稳定性,有利于取放隔板装置12能够稳定且准确地拾取隔板;当最顶层的瓶子组被移走后,压隔板机构28释放对隔板的按压,此时,取放隔板装置12即可拾取该隔板。
40.本实施例中,所述压隔板机构28包括两个压隔板组件281,两个压隔板组件281分别与两个扶料板22一一对应设置。通过两个压隔板组件281分别对隔板的两端进行按压,进一步提高了隔板的稳定性。
41.本实施例中,所述压隔板组件281包括装设于机架21的压隔板驱动器282及装设于压隔板驱动器282的输出端的压板283,所述压隔板驱动器282用于驱动压板283移进或移出升降空间;具体地,所述压隔板驱动器282可以采用气缸。在实际应用中,压隔板驱动器282驱动压板283往复移动,以使得压板283移进或移出升降空间,以实现对隔板进行压持或释放;动作简单、便捷和高效。
42.本实施例中,所述扶料驱动机构23包括两个扶料驱动组件231,两个扶料驱动组件231分别与两个扶料板22驱动连接;两个扶料驱动组件231同步工作,以驱动两个扶料板22彼此靠近或远离;具体地,所述扶料驱动组件231包括扶料驱动器232、联动杆233及两组伸缩连杆组件234,两组伸缩连杆组件234经由联动杆233连接,两组伸缩连杆组件234分别位于扶料板22的上部和下部,两组伸缩连杆组件234分别转动连接于扶料板22与机架21之间,所述扶料驱动器232的一端与机架21铰接,扶料驱动器232的另一端与其中一组伸缩连杆组件234驱动连接,所述扶料驱动器232可以采用气缸。在实际应用中,扶料驱动器232驱动其中一组伸缩连杆组件234伸缩,该组伸缩连杆组件234在伸缩工作的同时经由联动杆233带动另一组伸缩连杆组件234同步伸缩,同步伸缩的两组伸缩连杆组件234共同驱动扶料板22
往复移动;由于两组伸缩连杆组件234分别位于扶料板22的上部和下部,使得扶料板22的受力均匀,提高了扶料板22的移动稳定性。
43.本实施例中,所述伸缩连杆组件234包括转接轴235及对称设置于转接轴235的两个伸缩杆组236,所述伸缩杆组236包括第一伸缩杆237及第二伸缩杆238,所述第一伸缩杆237的一端与扶料板22铰接,第一伸缩杆237的另一端与转接轴235铰接,所述第二伸缩杆238的一端与转接轴235铰接,第二伸缩杆238的另一端与机架21铰接,所述联动杆233的两端分别与两组伸缩连杆组件234的转接轴235铰接。
44.在实际应用中,当扶料驱动器232的输出端伸展以驱动转接轴235上升时,上升的转接轴235驱动第一伸缩杆237和第二伸缩杆238伸展,伸展的第一伸缩杆237和第二伸缩杆238以驱动该扶料板22靠近另一个扶料板22移动,使得两个扶料板22彼此靠近移动,与此同时,上升的转接轴235带动联动杆233上移,上移的联动杆233推动另一组伸缩连杆组件234的转接轴235上升,使得两组伸缩连杆组件234同步伸展,以同步地驱动同一个扶料板22移动;反之,则两个伸缩连杆组件234收缩,使得两个扶料板22彼此远离移动。
45.本实施例中,所述承托机构24包括承托组件241及与堆垛升降机构25的升降端连接的升降板242,所述承托组件241包括装设于升降板242的承托驱动器243及连接于承托驱动器243的输出端的承托件244,所述承托驱动器243用于驱动承托件244经由承托升降槽221移进或移出升降空间;具体地,所述承托驱动器243可以采用气缸,所述堆垛升降机构25可以采用直线驱动模组。
46.在实际应用中,当堆垛满瓶子的托盘位于升降空间时,承托驱动器243的输出端伸展以驱动承托件244突伸至升降空间内,且承托件244插设在托盘的托孔内,以实现对托盘的承托;堆垛升降机构25驱动升降板242连带承托组件241和托盘同步升降,承托件244在升降的过程中,承托升降槽221为承托件244提供升降的空间,避免承托件244与扶料板22发生干涉,使得承托件244与扶料板22的结构紧凑。
47.具体地,所述承托件244的承托端呈l型,结构简单,便于承托件244对托盘进行承托;所述承托组件241的数量为多个,多个承托组件241沿着升降板242的长度方向排列设置;多个承托组件241同时对托盘进行承托,增加了承托机构24与托盘的接触面积,提高了承托机构24对托盘进行承托的稳定性。
48.具体地,所述扶料板22经由滑块与机架21滑动连接,提高了扶料板22的移动稳定性。
49.本实施例中的所有技术特征均可根据实际需要而进行自由组合。
50.上述实施例为本发明较佳的实现方案,除此之外,本发明还可以其它方式实现,在不脱离本技术方案构思的前提下任何显而易见的替换均在本发明的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1