基于机器学习方法的工业机械
1.本发明涉及自动化技术领域,尤其涉及基于机器学习方法的工业机械。
背景技术:
2.目前,工业机械主要已能够对一些形态差别较大的目标进行很好地分拣, 例如圆形、矩形、棱形的工件,又或者是颜色不同的目标物,而像汽车组装厂、 工程装备制造车间等应用场景,由于零部件、工件的尺寸较大、形态区别明显, 因此这种分拣粒度已足够使用。但目前的工业机械对于形态、颜色相似的物体 难以做出准确分类和分拣。为了缓减这一问题,业内也有人提出了结合人工智 能的方案,一些工业机械都加入了深度学习的算法,以提高工业机械识别的分 辨率。但是这些方案国内的大多数对于中小型非标公司而言,往往难投入到实 际使用中。
3.在生产加工时,需要用到多种零件进行装配,而一般是通过人工将所需要 的装配的零件按照指定数量一样一样的取出,并打包成一组,分开放置,从而 方便操作者进行取用,此过程需要大量的人力,劳动效率低,且人工再取出零 件时容易出错多拿或漏那。
技术实现要素:
4.本发明的目的是针对背景技术中存在的问题,提出一种能够方便对零件进 行打包的基于机器学习方法的工业机械。
5.本发明的技术方案:基于机器学习方法的工业机械,包括a机架、b机架、 出料斗、a输送机构、b输送机构、a分隔板、b分隔板、支撑架、支撑条、工 业摄像头、指示灯和处理器;
6.b机架和b输送机构均设置有多组;多组b机架均设置在a机架上;a分隔 板和b分隔板均设置有多个;多个a分隔板均匀设置在a输送机构上,且a分 隔板与a机架滑动连接;a输送机构设置在a机架上;b分隔板设置在b输送机 构上,且与b机架滑动连接;b输送机构设置在b机架上;出料斗设置在b机架 上,且出料斗位于b输送机构处;出料斗的下端设置在a机架上,且位于a输 送机构处;支撑架设置在b机架上;支撑条设置在支撑架上;工业摄像头设置 在支撑架上;指示灯设置有多个,多个指示灯均匀设置在支撑条上;工业摄像 头与处理器通讯连接,处理器与指示灯控制连接。
7.优选的,a输送机构包括a输送带、a输送辊和转动轴;a输送辊设置有两 个,两个a输送辊均转动设置在a机架上;a输送带设置在两个a输送辊上;多 个a分隔板均匀设置在a输送带上;转动轴设置在其中一个a输送辊上;a机架 上设置有用于驱动转动轴转动的驱动机构;驱动机构与处理器通讯连接;a机架 上设置有固定杆;转动轴转动设置在固定杆上。
8.优选的,b输送机构包括b输送带和b输送辊;b输送辊设置有两个,两个 b输送辊均转动设置在b机架上;b输送带滑动设置在b输送辊上;b分隔板均 匀设置在b输送带上;驱动机构的输出端与b输送辊连接。
9.优选的,驱动机构包括驱动电机、换向机构和传动机构;a机架上设置有安 装架;驱动电机设置在安装架上;驱动电机的输出端与转动轴连接;换向机构 设置在转动轴上;
换向机构与传动机构驱动连接;传动机构与b输送辊驱动连 接。
10.优选的,a机架和b机架上均设置有导向板;导向板分别与a输送带和b输 送带滑动连接。
11.优选的,a机架上设置有a挡板;b机架上设置有b挡板;a挡板的上端与a分隔板的上端平齐;b挡板的上端与b分隔板的上端平齐。
12.优选的,a机架上设置有防护板;防护板位于a机架上远离出料斗的一边。
13.优选的,a机架上设置有支撑板;支撑板与b机架连接。
14.与现有技术相比,本发明具有如下有益的技术效果:
15.本发明中,a输送机构和b输送机构同步传动;将需要进行打包的零件按照 指定数量放置到b输送机构上,且位于每两个b分隔板之间,每个b机架和b 输送机构上分别放置不同种类的零件,b输送机构带动该零件移动,且a输送机 构同步驱动a分隔板移动;工业摄像头设置有两个,b输送机构带动零件移动到 最远离出料斗处的工业摄像头的下方时,工业摄像头对零件进行拍照并反馈至 处理器内,处理器对照片进行分析,确定照片中的数量以及种类是否与设定的 信息一致,若数量或种类有一项与设定的信息不一致时,处理器控制指示灯亮 起一个,且根据b输送机构的输送速度使指示灯依次亮起,从而方便确定数量 或种类不一致的那组零件所在位置,从而能够方便操作进行更换,当另一个工 业摄像头再次拍摄的信息仍与设定的信息不一致时,则会零时停机,供操作者 对数量不合格或种类错位的零件进行跟换或补充,补充完成后,再次开机,由 于a输送机构和b输送机构同步输送,从而能够通过b输送机构将零件移动到 出料斗处时,且此时零件能够正好落入到两个a分隔板之间,从而能够方便对 多种零件进行汇总,方便打包,且不会出现零件数量不合格的问题。
附图说明
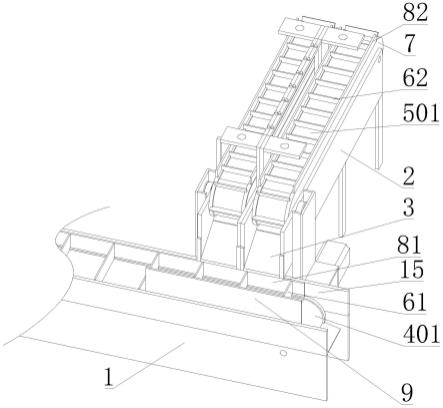
16.图1为本发明中实施例的结构示意图;
17.图2为图1中的结构剖视图;
18.图3为图2中的局部放大结构示意图;
19.图4为本发明中的连接关系示意图。
20.附图标记:1、a机架;2、b机架;3、出料斗;4、a输送机构;401、a输 送带;402、转动轴;5、b输送机构;501、b输送带;502、b输送辊;61、a 分隔板;62、b分隔板;7、导向板;81、a挡板;82、b挡板;9、防护板;10、 支撑架;1001、支撑条;11、工业摄像头;12、指示灯;13、驱动机构;1301、 驱动电机;1302、换向机构;1303、传动机构;14、安装架;1401、固定杆; 15、支撑板;16、处理器。
具体实施方式
21.实施例一
22.如图1-4所示,本发明提出的基于机器学习方法的工业机械,包括a机架1、 b机架2、出料斗3、a输送机构4、b输送机构5、a分隔板61、b分隔板62、 支撑架10、支撑条1001、工业摄像头11、指示灯12和处理器16;
23.b机架2和b输送机构5均设置有多组;多组b机架2均设置在a机架1上; a机架1上设
置有支撑板15;支撑板15与b机架2连接;a机架1能够通过支 撑板15对b机架2更好的进行装夹。a分隔板61和b分隔板62均设置有多个; 多个a分隔板61均匀设置在a输送机构4上,且a分隔板61与a机架1滑动 连接;a输送机构4设置在a机架1上;b分隔板62设置在b输送机构5上, 且与b机架2滑动连接;b输送机构5设置在b机架2上;出料斗3设置在b机 架2上,且出料斗3位于b输送机构5处;出料斗3的下端设置在a机架1上, 且位于a输送机构4处;a机架1上设置有防护板9;防护板9位于a机架1上 远离出料斗3的一边,防护板9能够对从出料斗3上滑落的物件进行阻挡,防 止物件飞出a机架1。支撑架10设置在b机架2上;支撑条1001设置在支撑架 10上;工业摄像头11设置在支撑架10上;指示灯12设置有多个,多个指示灯 12均匀设置在支撑条1001上;工业摄像头11与处理器16通讯连接,处理器16与指示灯12控制连接。a机架1上设置有a挡板81;b机架2上设置有b挡 板82;a挡板81的上端与a分隔板61的上端平齐;b挡板82的上端与b分隔 板62的上端平齐;a挡板81能够防止物件从a输送机构4上掉落;b挡板82 能够防止物件从b输送机构5上掉落。
24.本实施例中,a输送机构4和b输送机构5同步传动;将需要进行打包的零 件按照指定数量通过上料机放置到b输送机构5上,且位于每两个b分隔板62 之间,每个b机架2和b输送机构5上分别放置不同种类的零件,b输送机构5 带动该零件移动,且a输送机构4同步驱动a分隔板61移动;工业摄像头11 设置有两个,b输送机构5带动零件移动到最远离出料斗3处的工业摄像头11 的下方时,工业摄像头11对零件进行拍照并反馈至处理器16内,处理器16对 照片进行分析,确定照片中的数量以及种类是否与设定的信息一致,若数量或 种类有一项与设定的信息不一致时,处理器16控制指示灯12亮起一个,且根 据b输送机构5的输送速度使指示灯12依次亮起,从而方便确定数量或种类不 一致的那组零件所在位置,从而能够方便操作进行更换,当另一个工业摄像头 11再次拍摄的信息仍与设定的信息不一致时,则会零时停机,供操作者对数量 不合格或种类错位的零件进行跟换或补充,补充完成后,再次开机,由于a输 送机构4和b输送机构5同步输送,从而能够通过b输送机构5将零件移动到 出料斗3处时,且此时零件能够正好落入到两个a分隔板61之间,从而能够方 便对多种零件进行汇总,方便打包,且不会出现零件数量不合格的问题。
25.实施例二
26.如图1-4所示,本发明提出的基于机器学习方法的工业机械,相较于实施 例一,本实施例中a输送机构4包括a输送带401、a输送辊和转动轴402;a 输送辊设置有两个,两个a输送辊均转动设置在a机架1上;a输送带401设置 在两个a输送辊上;多个a分隔板61均匀设置在a输送带401上;转动轴402 设置在其中一个a输送辊上;a机架1上设置有用于驱动转动轴402转动的驱动 机构13;驱动机构13与处理器16通讯连接;a机架1上设置有固定杆1401; 转动轴402转动设置在固定杆1401上。b输送机构5包括b输送带501和b输 送辊502;b输送辊502设置有两个,两个b输送辊502均转动设置在b机架2 上;b输送带501滑动设置在b输送辊502上;b分隔板62均匀设置在b输送 带501上;驱动机构13的输出端与b输送辊502连接。a机架1和b机架2上 均设置有导向板7;导向板7分别与a输送带401和b输送带501滑动连接;导 向板7对a输送带401和b输送带501进行支撑,且提供保护,防止物料卡入。
27.驱动机构13包括驱动电机1301、换向机构1302和传动机构1303;a机架 1上设置有安装架14;驱动电机1301设置在安装架14上;驱动电机1301的输 出端与转动轴402连接;换向机构1302设置在转动轴402上;换向机构1302 与传动机构1303驱动连接;传动机构1303
与b输送辊502驱动连接。
28.本实施例中,驱动电机1301驱动转动轴402转动,转动轴402带动a输送 辊转动,且转动轴402通过换向机构1302改变转动方向,且通过传动机构1303 驱动b输送辊502转动;从而能够同时驱动a输送带401和b输送带501移动, 从而带动a分隔板61和b分隔板62移动,使其能够进行联动,从而能够在a 输送带401和b输送带501移动时,两个b分隔板62之间的物品能够正好落下, 并落下两个a分隔板61之间,方便进行集中收集,方便打包。
29.上面结合附图对本发明的实施方式作了详细说明,但是本发明并不限于此, 在所属技术领域的技术人员所具备的知识范围内,在不脱离本发明宗旨的前提 下还可以作出各种变化。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1