一种用于散货码头的自动装船换舱方法与流程
1.本发明涉及自动控制技术领域,具体为一种用于散货码头的自动装船换 舱方法。
背景技术:
2.全球贸易一体化的发展促进了全球范围内对散料运输的需求。从大类商 品来看,矿石、煤炭、粮食等散货分布不均衡,海运量也不断提升。伴随着 这一发展的是散货大船的不断更新,这就需要港口装卸设备的控制功能不断 更新。
3.传统的装船机换舱过程中,需要把装船机大臂收缩,然后仰到最高处, 接着沿着轨道移动装船机到目标位置,最后伸出大臂,并将大臂降到目标位 置。这个过程大概需要持续20分钟,既影响工作效率,又造成能源浪费。并 且装船机司机在工作过程中,由于现场恶劣的环境和长时间的货物装载,极 易引起人员疲劳,而且受视角、粉尘等因素限制,容易发生装船机溜筒与船 舱、船盖碰撞的风险,因此实现自动装船换舱,可以提高作业效率和质量, 降低工作人员作业强度。
技术实现要素:
4.本发明的目的在于提供一种用于散货码头的自动装船换舱方法,以解决 上述背景技术中提出的实现自动装船换舱,提高作业效率和质量,降低工作 人员作业强度的问题。
5.为实现上述目的,本发明提供如下技术方案:一种用于散货码头的自动 装船换舱方法,该用于散货码头的自动装船换舱方法包括如下步骤:
6.s1:通过管控系统获取船舶号码,确定船型,通过三维激光扫描仪扫描 确定船舱位置,通过船舶姿态检测仪确定船舶姿态;根据装船计划,确定装 船机移动的目标舱。
7.s2:通过船舶姿态检测仪实时监控船舶姿态,根据船舶姿态及船舶坐标 确定目标舱对舱点;
8.s3:确定对舱点后,根据当前位置和目标舱对舱点的位置偏差确定装船 机移动及其大臂伸缩俯仰的移动路线,进而建立装船机的运动路线。
9.优选的,所述船舱位置的确定是通过安装在装船机臂架上三维激光扫描 仪的扫描数据,对船舶进行建模确定船舱位置。
10.优选的,所述对舱点设置有五个。
11.优选的,所述对舱点的五个点分别为船舱中心位置o,与船舱口里杆、外 杆距离p的位置,与船舱口前、后方向距离q的位置点。
12.与现有技术相比,本发明的有益效果是:本发明实现装船机换舱作业路 径的自动规划,确保装船换舱作业安全高效的完成。
附图说明
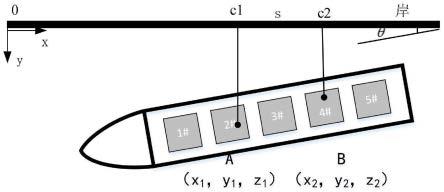
13.图1为本发明对舱点示意图;
14.图2为本发明船舶倾斜角度坐标系示意图;
15.图3为本发明装船机大臂的抬高角度示意图;
16.图4为本发明装船机要位移示意图;
17.图5为本发明装船机大臂俯仰的目标角度示意图。
具体实施方式
18.下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行 清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而 不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有做 出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
19.本发明提供一种用于散货码头的自动装船换舱方法,实现装船机换舱作 业路径的自动规划,确保装船换舱作业安全高效的完成,该用于散货码头的 自动装船换舱方法包括如下步骤:
20.s1:通过管控系统获取船舶号码,确定船型,通过扫描确定船舱位置, 通过船舶姿态检测仪确定船舶姿态,船舱位置的确定是通过安装在装船机臂 架上三维激光扫描仪的扫描数据,对船舶进行建模确定船舱位置;根据装船 计划,确定装船机移动的目标舱。
21.s2:通过船舶姿态检测仪实时监控船舶姿态,根据船舶姿态及船舶坐标 确定目标舱对舱点,对舱点设置有五个,分别为船舱中心位置o,与船舱口里 杆、外杆距离p的位置,与船舱口前、后方向距离q的位置点;
22.s3:确定对舱点后,根据当前位置和目标位置确定装船机移动及其大臂 伸缩俯仰的移动路线,找到当前位置和目标舱对舱点的位置偏差,进而建立 装船机的运动路线。
23.实施例
24.通过管控系统获取船舶号码,进而确定船型,采集安装在装船机臂架上 三维激光扫描仪的扫描数据,对船舶进行建模,确定船舱的位置,采集船舶 姿态检测仪数据确定船舶姿态;
25.装船机换舱是根据装船计划,将装船机从当前舱移动到目标舱,为了保 证换舱时间最短,在保证移舱安全的前提下,尽可能的缩短换舱过程中装船 机与大臂的移动距离;
26.实时监控船舶姿态,根据船舶姿态及船舶坐标确定目标舱对舱点,设置5 个对舱点,如图1所示,船舱中心位置o,与船舱口里杆、外杆距离p的位置, 与船舱口前、后方向距离q的位置点,假设船舱长、宽分别为m、n,溜筒直 径为d,防碰撞安全阈值为g,则
[0027][0028][0029]
由于船舶是刚性物体,所以船舶每个位置的倾斜角度都一致,因此我们 直接采集
船舶姿态检测仪的数据来确定对舱点,要确定具体采用哪个点位对 舱,需要观察船舶的四个方向的船舶姿态(里杆、外杆、前位、后位),船舶 倾斜角度以船舶姿态检测仪为坐标原点,垂直于中轴线外杆方向为x轴正方 向,平行于船中轴线向后方向为y轴正方向,垂直向上为z轴正方向,xoz面 倾斜角度作为横滚角α,yoz面的倾斜角度作为俯仰角β,如图2所示,其中 α≥0为外杆高于里杆,β≥0为船舶后高于前;
[0030]
观察看横滚角和俯仰角的偏差大小,若横滚角度不小于俯仰角,即|α|≥|β|, 则定位4号位或者5号位,在此基础上若α>0,则对舱5号位,反之,对舱4 号位,若横滚角度小于俯仰角,即|α|<|β|,则定位3号位或者4号位,在此基 础上若β>0,则对舱2号位,反之,对舱1号位;
[0031]
确定对舱点后,根据当前位置和目标位置确定装船机移动及其大臂伸缩 俯仰的移动路线,对船舶模型进行分析,采用三维激光扫描仪数据对船舶建 模,找到当前位置和目标舱对舱点的位置偏差,进而建立装船机的运动路线;
[0032]
为了保证装船移舱过程安全性,选择两舱之间最高点作为大臂抬高的最 低点,船舶模型以装船机轨道原点为坐标原点,水平平行于海岸方向为x轴, 水平垂直于海岸方向为y轴,垂直向上为z轴,根据船舶模型,扫描出两舱 之间最有可能发生碰撞的船玮、舱口、舱盖的高度,并计算出最高高度;
[0033]
为了防止装船机换舱移动过程中,大臂溜筒与船舱发生碰撞,在设置路 径时,先抬高大臂,使大臂最低处高于船舶最高处,假设移舱过程中,大臂 整体长度(固定部分l1+可伸缩部分l2)为l,装船机大臂俯仰支撑点位置高 度为h,船舶最高处为e,溜筒长度为f,设定安全阈值为t,则装船机大臂 的抬高角度为如图3所示;
[0034]
抬高大臂之后,装船机开始进车行走,移动到目标位置,受到风力、浪 等各方面的影响,船舶的停靠与岸边可能存在一定的倾斜角度,因此需要对 目标点进行位置换算,得到待移动的位置,以假设轮船航向角为θ,当前溜筒 对应的位置坐标为a(x1,y1,z1),目标位置坐标为b(x2,y2,z2),则装船 机要向前移动的距离为如图4所示;
[0035]
移动到目标位置以后,装船机将大臂下放到目标位置,同时伸缩大臂, 使得大臂整体长度为y2,则伸缩部分目标长度为l2=y2-l1,俯仰的目标角度 为如此便对舱成功,如图5所示。
[0036]
虽然在上文中已经参考实施例对本发明进行了描述,然而在不脱离本发 明的范围的情况下,可以对其进行各种改进并且可以用等效物替换其中的部 件。尤其是,只要不存在结构冲突,本发明所披露的实施例中的各项特征均 可通过任意方式相互结合起来使用,在本说明书中未对这些组合的情况进行 穷举性的描述仅仅是出于省略篇幅和节约资源的考虑。因此,本发明并不局 限于文中公开的特定实施例,而是包括落入权利要求的范围内的所有技术方 案。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1