特殊工况下塔机超长扶臂的方法与流程
1.本发明涉及建筑施工技术领域,特殊工况下塔机超长扶臂的方法。
背景技术:
2.随着建筑设计领域日趋多元化,建筑风貌也日趋丰富多彩,尤其在群体建筑中,主附楼高低变化,错落有致,不但突出主楼的高大雄伟,同时也体现了附楼的挺拔秀丽。
3.由于建筑体型的变化多样,因此在施工部署过程中需充分对建筑的形-体样式重点进行考虑,确保施工能够有序进行,避免相互制约。根据以往施工部署经验,主楼会作为整个工程施工的关键线路,各项资源的调配会更倾向于确保主楼的施工组织,在垂直运输方面更是如此,主楼的塔式起重机会根据主楼的施工逐步附着在主楼结构上并升高,且主楼的塔机也将成为整个施工现场的制高点,在转动及吊装等方面处于一个优势位置。
4.但在施工组织工程中,不可确定性因素较多,主楼可能由于多方面原因未能按照常规部署实施,以至于附楼施工高度超过主楼所施工的高度,针对此种特殊工况,主楼塔式起重机受主楼施工高度制约,附着后的高度可能低于附楼现有施工高度,主楼塔机大臂将与附楼主体结构存在交叉,导致主楼塔机大臂无法满足自由转动的要求。主楼垂直运输效率将进一步降低甚至停工,从而导致工程出现主楼无法进一步组织施工的难题。
5.主楼塔机无法有效附着在主楼结构上而导致主楼塔机垂直运输效率低,无法快速组织等难题亟需解决。
技术实现要素:
6.本发明的目的在于克服现有技术的缺陷,提供一种特殊工况下塔机超长扶臂的方法,解决现有附楼施工高度主楼高的施工高度导致制约主楼塔机垂直运输的问题。
7.实现上述目的的技术方案是:
8.本发明提供了一种特殊工况下塔机超长扶臂的方法,适用于在附楼施工高度高于主楼施工高度时主楼塔机的附着施工,所述方法包括如下步骤:
9.升高主楼塔机,让所述主楼塔机的高度高于附楼施工高度使得主楼塔机能够自由转动;以及
10.提供扶臂,将所述扶臂的一端与主楼塔机连接,另一端与附楼对应的位置连接。
11.本发明的超长扶臂方法利用扶臂将主楼塔机附着在附楼上,利用附楼对主楼塔机进行支撑,使得主楼塔机能够升高到超出附楼,进而避开了与附楼的交叉制约,满足主楼垂直运输施工的要求,避免主楼停工现象的发生。
12.本发明特殊工况下塔机超长扶臂的方法的进一步改进在于,在连接扶臂之前还包括:
13.调节主楼塔机的垂直度;
14.测量主楼塔机距附楼的距离,根据测量得到的主楼塔机距附楼的距离提供对应长度的扶臂。
15.本发明特殊工况下塔机超长扶臂的方法的进一步改进在于,所提供的扶臂的一端为固定端部,另一端为可调节端部;
16.在连接扶臂时,将所述扶臂的固定端部固定连接在所述主楼塔机上,将所述扶臂的可调节端部通过钢丝绳临时吊装在附楼上;
17.调节所述主楼塔机的垂直度,在调节好主楼塔机的垂直度后,解除所述钢丝绳的临时连接,调节所述扶臂的可调节端部并将所述可调节端部连接在所述附楼上。
18.本发明特殊工况下塔机超长扶臂的方法的进一步改进在于,在调节主楼塔机的垂直度时,提供重物,将重物吊装在主楼塔机的大臂吊钩上,沿主楼塔机的大臂滑动重物至设定位置以使得主楼塔机的大臂处于力矩平衡状态,从而完成了主楼塔机的垂直度调节。
19.本发明特殊工况下塔机超长扶臂的方法的进一步改进在于,所提供的扶臂包括多个扶臂单元,相邻的两个扶臂单元对接连接,位于一端部处的扶臂单元的端部形成固定端部,位于另一端部处的扶臂单元的端部形成可调节端部。
20.本发明特殊工况下塔机超长扶臂的方法的进一步改进在于,还包括:
21.在主楼塔机的标准节上设置扶臂框,于所述附楼的对应位置设置埋件;
22.连接扶臂时,将所述扶臂的一端与所述扶臂框固定连接,将所述扶臂的另一端与对应的埋件连接。
23.本发明特殊工况下塔机超长扶臂的方法的进一步改进在于,设置扶臂时,沿着主楼塔机的标准节间隔的设置多道扶臂。
24.本发明特殊工况下塔机超长扶臂的方法的进一步改进在于,设置扶臂时,同一高度处设置多个扶臂。
附图说明
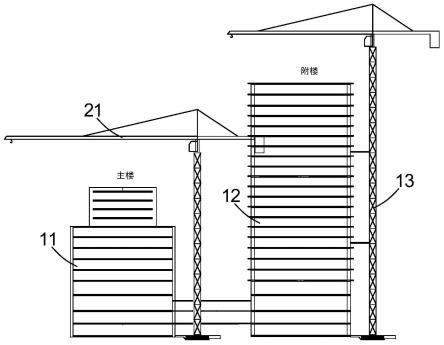
25.图1为本发明特殊工况下塔机超长扶臂的方法的主楼塔机附着附楼的结构示意图。
26.图2为本发明特殊工况下塔机超长扶臂的方法的主楼塔机附着附楼的俯视图。
27.图3为本发明特殊工况下塔机超长扶臂的方法中所用的扶臂的结构示意图。
28.图4为本发明特殊工况下塔机超长扶臂的方法中所用的扶臂的可调节端部的结构示意图。
29.图5为图4所示结构的分解结构示意图。
30.图6为本发明特殊工况下塔机超长扶臂的方法中测量主楼塔机距附楼距离的结构示意图。
31.图7为本发明特殊工况下塔机超长扶臂的方法中安装扶臂的结构示意图。
32.图8为本发明特殊工况下塔机超长扶臂的方法中的特殊工况下主楼塔机与附楼存在交叉的结构示意图。
具体实施方式
33.下面结合附图和具体实施例对本发明作进一步说明。
34.参阅图1,本发明提供了一种特殊工况下塔机超长扶臂的方法,用于解决附楼施工高度高于主楼施工高度造成附楼制约主楼塔机的自由转动使得主楼垂直运输效率降低甚
至停工的问题。本发明的方法改变常规塔机附着思路,将原本附着在主楼上的主楼塔机利用特殊设计的扶臂附着在附楼上,如此让主楼塔机的高度能够高于附楼的施工高度,如此避开附楼对主楼塔机的制约影响,使得主楼塔机能够自由的转动,满足主楼施工的垂直运输需求。下面结合附图对本发明特殊工况下塔机超长扶臂的方法进行说明。
35.参阅图1,显示了本发明特殊工况下塔机超长扶臂的方法的主楼塔机附着附楼的结构示意图。下面结合图1,对本发明特殊工况下塔机超长扶臂的方法进行说明。
36.如图1示,本发明的特殊工况下塔机超长扶臂的方法,适用于在附楼施工高度高于主楼施工高度时主楼塔机的附着施工,该方法包括如下步骤:
37.升高主楼塔机21,让主楼塔机21的高度高于附楼12施工高度使得主楼塔机21能够自由转动;
38.提供扶臂22,将扶臂22的一端与主楼塔机21连接,另一端与附楼12对应的位置连接。
39.扶臂22将主楼塔机21附着在附楼12上,利用附楼12来支撑主楼塔机21,使得主楼塔机21可升高到高于附楼12的施工高度,解决主楼塔机受主楼高度制约附着后塔机高度无法满足施工组织要求的难题。
40.在本发明的一种具体实施方式中,如图6所示,在连接扶臂之前还包括:
41.调节主楼塔机21的垂直度;
42.测量主楼塔机21距附楼12的距离d,根据测量得到的主楼塔机21距附楼12的距离d提供对应长度的扶臂22。
43.主楼塔机在非吊装状态下处于最不利受力状态,主楼塔机的塔身的微动变形较大,此时测量得到的主楼塔机距附楼的距离误差较大,为此,本发明先调节主楼塔机21的垂直度,而后再根据调节好垂直度的主楼塔机距附楼的距离提供对应长度的扶臂,解决主楼塔机附着长度受到主楼塔机的塔身微动影响较大的问题。
44.在本发明的一种具体实施方式中,如图3所示,所提供的扶臂22的一端为固定端部221,另一端为可调节端部222;
45.结合图7所示,在连接扶臂22时,将扶臂22的固定端部221固定连接在主楼塔机21上,将扶臂22的可调节端部222通过钢丝绳23临时吊装在附楼12上;
46.调节主楼塔机21的垂直度,在调节好主楼塔机21的垂直度后,解除钢丝绳23的临时连接,调节扶臂22的可调节端部222并将可调节端部222连接在附楼12上。
47.在将可调节端部222连接到附楼12上后,将可调节端部222与扶臂22的本体固定连接,锁定该可调节端部的调节功能。
48.在本发明的一种具体实施方式中,如图1、图6和图7所示,在调节主楼塔机21的垂直度时,提供重物30,将重物30吊装在主楼塔机21的大臂212的吊钩213上,沿主楼塔机21的大臂212滑动重物30至设定位置以使得主楼塔机21的大臂212处于力矩平衡状态,从而完成了主楼塔机21的垂直度调节。
49.主楼塔机21包括由多个标准节211拼接连接形成的塔身、设于塔身顶部的大臂212以及滑设在大臂212上的吊钩213,该吊钩213可沿着大臂212进行移动调节,吊钩213的高度也可调节,如此利用吊钩213可实现吊运。在调节主楼塔机21的垂直度时,在吊钩213上吊装重物30,根据吊物力矩平衡原理计算得出该重物30的水平位置,然后移动该重物30至对应
的位置处,该重物30的重力与其力臂的乘积等于大臂另一端的操作室的重力与其力臂的乘积,此时大臂213处于受力平衡的状态,该大臂213能够保持水平。大臂处于水平状态,能够使得塔身受力稳定且平衡,确保塔身的垂直度,在塔身处于垂直的状态下,测量所需扶臂的长度,为扶臂的制作提供现场实测实量依据。进一步地,在塔身调节好垂直度后,利用全站仪进学校垂直度的复测。
50.在本发明的一种具体实施方式中,如图3所示,所提供的扶臂22包括多个扶臂单元,相邻的两个扶臂单元对接连接,位于一端部处的扶臂单元的端部形成固定端部221,位于另一端部处的扶臂单元的端部形成可调节端部222。
51.扶臂22设计为拼接连接的结构,能够根据实际需要进行拼接,相邻的两个扶臂单元通过法兰板及螺栓实现对接连接,拼接施工简单方便,可在现场根据实测的距离进行拼接。
52.如图4和图5所示,扶臂22包括支撑杆223、固定连接在该支撑杆223一端部的固定耳座以及滑设连接在该支撑杆223另一端部的调节耳座224,固定耳座形成固定端部221,该固定耳座通过销轴紧固连接在主楼塔机21上,调节耳座224形成可调节端部222,在支撑杆223的端部设有滑槽2231,在调节耳座224处设有与滑槽2231相适配的滑板2241,滑板2241可滑设在滑槽2231内,从而实现调节功能。较佳地,支撑杆223为方管,内部中空,滑槽2231设于方管的四个侧面上,滑板2241为十字形板,该十字形板插设在方管内并从对应的滑槽2231处伸出,滑板2241可沿着滑槽2231进行滑动,当滑板2241向着方管的内部滑动时,调节耳座2241向着靠近方管的端部移动,此时扶臂22的整体长度变小,当滑板2241向着方管的外部滑动时,扶臂22的整体长度变大,根据该调节而走2241的移动调节可实现扶臂长度的微调,以满足实际安装需求,在安装扶臂时,通过调节该调节耳座位置,让调节耳座224与附楼连接,在连接好后,将滑板与方管焊接固定,使得调节耳座224固定牢固可靠。调节耳座224较佳通过销轴与附楼12固定连接。
53.在本发明的一种具体实施方式中,还包括:
54.如图7所示,在主楼塔机21的标准节上设置扶臂框214,于附楼12的对应位置设置埋件121;
55.连接扶臂22时,将扶臂22的一端与扶臂框214固定连接,将扶臂22的另一端与对应的埋件121连接。
56.较佳地,在扶臂框214的角部处设有连接耳板,将扶臂22的固定端部处设置的耳板与该扶臂框上的连接耳板对齐,而后通过销轴紧固连接扶臂与扶臂框。埋件121较佳为牛腿,在牛腿上设置与调节耳座连接的耳板,在调节耳座与耳板对齐后通过销轴实现紧固连接。
57.在本发明的一种具体实施方式中,如图1所示,设置扶臂22时,沿着主楼塔机21的标准节211间隔的设置多道扶臂22。
58.进一步地,结合图2所示,设置扶臂22时,同一高度处设置多个扶臂22。
59.较佳地,在同一高度处设置三个扶臂22,其中两个扶臂22连接在主楼塔机上的位置相靠近,连接在附楼12上的位置相远离,如此该两个扶臂22构成三角支撑,能够提高支撑强度,另一个扶臂22的端部与主楼塔机的扶臂框的一个端部连接,该连接的端部与另外两个扶臂连接的端部相远离,该另一个扶臂22的另一端连接在附楼上的位置与其邻近的扶臂
的连接位置相靠近。
60.如图8所示,本发明的特殊工况是指主楼11的施工高度低于附楼12的施工高度,在主楼11的旁侧设置有主楼塔机21为主楼11的施工提供垂直运输服务,在附楼12的旁侧设置有附楼塔机13为附楼12的施工提供垂直运输服务。主楼塔机21靠近主楼11设置,其与附楼12之间的距离大于其与主楼11之间的距离。当因某些特殊原因发生附楼12的施工高度高于主楼11的施工高度时,附楼12会制约主楼塔机21的转动,使得主楼塔机21无法正常的使用,为解决这一问题,本发明的方法是将主楼塔机通过扶臂附着在附楼上,随着附楼的主体结构高度的升高而逐步的进行主楼塔机的附着及顶升,确保主楼塔机通过附楼的附着而使其高度始终高于附楼的高度,也高于附楼塔机的高度,确保主楼塔机能够不受其他结构的影响,保证主楼施工及垂直运输不受周边结构的影响。为便于主楼塔机附着在附楼上,本发明特别设计了超长扶臂,该超长扶臂为装配式结构,能够在现场根据实际情况进行组装,可保证塔机附着的安全性。
61.本发明的塔机附着思路打破常规局限,通过扶臂特殊定制实现主楼塔机附着在附楼结构上,为多单体工程施工部署、塔式起重机布置等提供更开阔的思路。
62.扶臂采用可调节端部设计加工生产简单,精度要求可大幅度降低,较常规塔机可调丝杆扶臂设计更易实施。
63.扶臂实测实量过程中采用力矩平衡法进行塔身垂直度调整,通过全站仪复测后确定扶臂定尺长度。
64.以上结合附图实施例对本发明进行了详细说明,本领域中普通技术人员可根据上述说明对本发明做出种种变化例。因而,实施例中的某些细节不应构成对本发明的限定,本发明将以所附权利要求书界定的范围作为本发明的保护范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1