一种辅助塔机顶升操作的安全监测装置及监测方法与流程
1.本发明涉及建筑施工安全技术领域,尤其是一种辅助塔机顶升操作的安全监测装置及监测方法。
背景技术:
2.随着城市化进程的发展和土地资源的日趋紧缺,高层、超高层建筑越来越普遍,塔式起重机(以下简称“塔机”)作为最主要的垂直运输机械,在工业和民用高层建筑施工中得到广泛的应用。塔机的使用对于提高施工方施工效率,有效降低成本有着重大的意义,但与此同时塔机安全问题也相伴而来,其中顶升、落节(安装、拆卸)过程已成为公认的事故多发环节。在传统的塔机顶升过程中,塔机的平衡状态、爬爪及顶升横梁的就位状态,顶升套架与回转下支座的连接状态,顶升油缸的行程状态、标准节的引进状态等都需要专人进行监察操作,但这种传统方式受操作人员的主观判断的影响,缺乏准确的判断标准,使人为操作的缺点放大,增大了出现安全事故的概率。
3.现在,随着人们安全意识的不断增强,塔机安装、拆卸过程已成为安全监管的重中之重。塔机顶升过程的安全施工主要靠规定、制度、人员培训等措施,但塔机顶升过程工况复杂,人为因素变数较大,即便是在传统模式下加强培训、制度管理的施工方式也完全不能杜绝安全事故的。随着我国工程规模的增大,建筑施工智能化、数字化时代也逐渐开启。尽快根据国情研制一种在塔机顶升过程中可以辅助其进行安全装配的装置及方法是目前塔机安全工程的必然选择。
技术实现要素:
4.为了克服现有技术中存在的上述问题,本发明提出一种辅助塔机顶升操作的安全监测装置及监测方法。
5.本发明解决其技术问题所采用的技术方案是:一种辅助塔机顶升操作的安全监测装置,包括塔机平衡状态监测装置、防冒顶限制装置、油缸行程限制装置、视频监测模块,所述塔机平衡状态监测装置包括幅度传感器、重量传感器、双向线性位移传感器、终端处理器,所述幅度传感器安装在变幅机构处,所述重量传感器安装在起升钢丝绳导向滑轮处,所述双向线性位移传感器设置有两个,一个安装在沿着塔机起重臂方向,顶升套架水平腹杆上,正对标准节主肢,另一个安装在沿着垂直于塔机起重臂方向,顶升套架水平腹杆上,正对标准节主肢,所述终端处理器用于获取处理所述幅度传感器、重量传感器和双向线性位移传感器获取的信息;
6.所述防冒顶限制装置安装于塔身顶部,所述油缸行程限制装置安装于顶升油缸上,所述视频监测模块用于实时监测塔机状态。
7.上述的一种辅助塔机顶升操作的安全监测装置,所述终端处理器内部设置蜂鸣提示器,用于在处理判断塔机到达平衡状态时,发出警示信号。
8.上述的一种辅助塔机顶升操作的安全监测装置,所述双向线性位移传感器为电阻
式双向线性位移传感器。
9.上述的一种辅助塔机顶升操作的安全监测装置,所述防冒顶限制装置包括传动安装支架、滚轮、行程限制器,所述传动安装支架包括固定支架及活动支架,所述固定支架与活动支架一端转动连接,所述固定支架与活动支架中间位置安装弹簧,所述滚轮安装于活动支架顶部,所述滚轮中间位置安装传动齿轮,所述传动齿轮与行程限制器上的齿轮啮合。
10.上述的一种辅助塔机顶升操作的安全监测装置,所述固定支架带有可调节式夹紧装置,通过旋转调节螺钮将传动安装支架夹紧固定在正对于标准节主肢的顶升套架主肢上,所述活动支架靠近标准节主肢。
11.上述的一种辅助塔机顶升操作的安全监测装置,所述油缸行程限位装置为一种卷尺式行程限制装置,包括尺条、可拆卸式卡环、触点开关、可拆卸式外壳,所述尺条安装于可拆卸式外壳上,所述可拆卸式卡环环绕固定在尺条上,可随尺条卷入,所述触点开关位于尺条出口处,所述触点开关可控制顶升油缸操作平台控制回路的开闭。
12.上述的一种辅助塔机顶升操作的安全监测装置,所述视频监测模块包括4 个摄像头拍摄点位及2个视频显示器安置点位,4个所述摄像头拍摄点位包括油缸爬爪就位状态拍摄点位、顶升套架与回转下支座销轴连接状态拍摄点位、卷扬机拍摄点位、标准节引进横梁拍摄点位,2个所述视频显示器安置点位包括安装于顶升油缸平台上的油缸显示器、安装于司机室的司机室显示器。
13.任意一种所述的辅助塔机顶升操作的安全监测装置的监测方法,包括如下步骤:
14.步骤1,视频监测装置对塔机进行实时监测,通过塔机平衡状态监测装置进行平衡状态监测,同时找到塔机的平衡位置;
15.步骤2,找到平衡位置后,顶升套架上的顶升油缸动作,推动塔机顶升套架及以上的塔机组成部分向上移动,通过油缸行程限制装置对油缸行程进行监测控制;
16.步骤3,顶升套架顶升到临近一个标准节的高度时,通过防冒顶限制装置监测顶升套架的位置;
17.步骤4,顶升油缸顶升动作完成后,进行标准节的引进及安装,视频监测模块监测标准节的引进过程,完成安装。
18.步骤5,标准节下端与塔身固定连接完成后,顶升油缸回缩,使顶升套架及以上塔机组成部分回落,使回转支座与新安装的标准节上端接触,并对准标准节与回转支座的连接孔,进行连接固定。
19.上述的一种辅助塔机顶升操作的安全监测装置的监测方法,所述步骤1 中塔机平衡状态监测装置对塔机平衡状态的监测方法具体为:
20.步骤1.1,建立坐标系:以起重臂方向为x方向,以垂直于起重臂方向为y方向;
21.步骤1.2:两个双向线性位移传感器分别监测x方向及y方向位移偏量,具体计算公式如下,
22.x方向位移偏量l
x
计算公式为:
[0023][0024]
其中,h为顶升套架高度;e为顶升套架材料的弹性模量;i
x
为顶升套架截面沿x方向的惯性矩;m
x
为塔身在x方向所受弯矩,m为调平衡过程中起吊重物的质量;fw为风载荷;μ
为变幅小车的幅度,且
△
x 为沿着x方向标准节与顶升套架之间的间隙;
[0025]
y方向位移偏量ly计算公式为:
[0026][0027]
其中,h为顶升套架高度;e为顶升套架材料的弹性模量;iy为顶升套架截面沿y方向的惯性矩;my为塔身在y方向所受弯矩;fw为风载荷;
△
y为沿着y方向标准节与顶升套架之间的间隙。
[0028]
步骤1.3:根据步骤1.2的计算公式,分别计算x方向和y方向的相对于标准节位移偏量的最大值和最小值,计算公式如下,
[0029]
x方向相对于标准节的位移偏量l
px
计算公式为:
[0030]
l
px
=|l
x max-l
x min
|
[0031][0032][0033]
其中,l
x max
为x方向相对于标准节的位移偏量的最大值,l
x min
为x方向相对于标准节的位移偏量的最小值,h为顶升套架高度;e为顶升套架材料的弹性模量;i
x
为顶升套架截面沿x方向的惯性矩;m
xmin
为塔身在x方向所受的最小弯矩;m
xmax
为塔身在x方向所受的最大弯矩;m为调平衡过程中起吊重物的质量;fw为风载荷;μ
min
为0;
△
x为沿着x方向标准节与顶升套架之间的间隙;
[0034]
y方向相对于标准节的位移偏量l
py
计算公式为:
[0035]
l
py
=|l
y max-l
y min
|
[0036][0037][0038]
其中,l
ymax
为y方向相对于标准节的位移偏量的最大值;l
ymin
为y方向相对于标准节的位移偏量的最小值;h为顶升套架高度;e为顶升套架材料的弹性模量;iy为顶升套架截面沿y方向的惯性矩;m
ymin
为塔身在y方向所受的最小弯矩;m
ymax
为塔身在y方向所受的最大弯矩;fw为风载荷;
△
y为沿着y方向标准节与顶升套架之间的间隙。
[0039]
步骤1.4,根据步骤1.3的计算,得到顶升套架相对于标准节的位移偏量的安全平面区域为(l
px
,l
py
),当顶升套架相对于标准节的位移偏量超过安全区域则发出警报。
[0040]
上述的一种辅助塔机顶升操作的安全监测装置的监测方法,所述塔机平衡状态监测装置可实时监测顶升套架相对于标准节的位移偏量,当顶升套架相对于标准节的位移偏
量最小时,则为塔机的平衡位置。
[0041]
本发明的有益效果是,本发明可全面有效的对塔机顶升进程进行监测,实现塔机顶升过程中,在安全情况下的状态监测和不安全情况下的风险管控,安全有效的辅助操作人员进行塔机顶升作业。
附图说明
[0042]
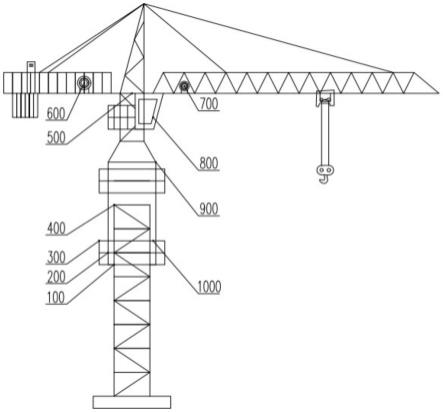
图1为本发明安全监测装置安装分布示意图;
[0043]
图2为本发明卷尺式行程限制装置示意图;
[0044]
图3为本发明防冒顶限制装置示意图;
[0045]
图4为本发明双向线性位移传感器示意图;
[0046]
图5为本发明双向线性位移传感器内部结构示意图;
[0047]
图6为本发明塔机组成示意图。
[0048]
图中1、标准节,2、塔身,3、顶升套架,4、回转支座,5、变幅小车, 6、起重臂,100、摄像头一,200、卷尺式行程限制装置,300、顶升油缸平台,400、防冒顶限制装置,500、重量传感器,600、摄像头三,700、幅度传感器,800、司机室,900、摄像头二,1000、双向线性位移传感器,210、尺条,220可拆卸式外壳,230、可拆卸式卡环,240、触点开关,410、活动端,420、传动弹簧,430、行程限制器,440、滚轮,450、滚轮啮合齿轮, 460、夹紧固定支架,470、调节螺钮,480、活动夹板,490、固定端,1010、电阻式的双向线性位移传感器,1020、中间旋转连杆,1030、调节丝杠,1040、活动夹具,1050、固定捆扎带;1011、电阻圈,1012、弹簧,1013、动片指针。
具体实施方式
[0049]
为使本领域技术人员更好的理解本发明的技术方案,下面结合附图和具体实施方式对本发明作详细说明。
[0050]
如图1所示,本发明公开了一种辅助塔机顶升操作过程的安全检测装置,包括塔机平衡状态监测装置、防冒顶限制装置、卷尺式行程限制装置、视频监测模块,视频监测模块包括4个摄像头拍摄点位和两个视频显示器安置点位,其中4个摄像头拍摄点位可由三个摄像头拍摄,摄像头一100位于顶升套架正对爬爪部位,为爬爪就位状态拍摄点位,摄像头二900位于在顶升套架正对套架与下支座连接销轴位置,为顶升套架与回转下支座螺栓连接状态拍摄点位及标准节引进横梁拍摄点位,爬爪就位状态拍摄点位及顶升套架与回转下支座螺栓连接状态拍摄点位在油缸显示器中显示,油缸显示器安装在顶升油缸平台300上;摄像头三600安装在正对起升卷扬卷筒的位置,为卷扬机拍摄点位,用于拍摄钢丝绳绕绳状态,标准节引进横梁拍摄点位用于拍摄标准节引进状态,上述两处摄像头拍摄画面在司机室显示器中显示,安装在司机室800中;卷尺式行程限位装置点位200,位于顶升油缸上;防冒顶限制装置400,位于标准节四个主肢顶端。
[0051]
塔机平衡状态监测装置包括:重量传感器500,安装在塔机起升钢丝绳导向滑轮上,用于采集塔机起吊重物的重量值;幅度传感器700安装在变幅机构卷筒一侧,用于实时获取小车幅度变化值;终端处理器安装于司机室800 中,用于获取处理幅度传感器、重量传感器和双向线性位移传感器获取的信息,内部设置蜂鸣提示器,用于在处理判断塔机到达
平衡状态时,发出警示信号;双向线性位移传感器点位1000位于顶升套架与标准节之间,共两个双向线性位移传感器,其中一个安装在沿着塔机起重臂方向,顶升套架水平腹杆上,正对标准节1主肢,在顶升调平衡过程中,变幅小车5从起重臂6的末端前进,随着变幅小车5的幅度值逐渐增加,塔机的前倾力矩也逐渐增大,与塔机初始状态时自有的后倾力矩逐渐平衡,逐渐达到平衡状态;变幅小车5 再向前移动,塔机的前倾力矩会大于后倾力矩,塔机开始前倾。在这个过程中,顶升套架相对于标准节的偏移量会是一个逐渐减小,直到到达最小值,再逐渐增大的过程。终端处理器根据这一数据变化特性,在监测到位移传感器达到最小值时,进行蜂鸣提示,并反馈该时刻下所对应的小车幅度值,该处即为塔机顶升过程中的平衡位置;另一个安装在沿着垂直于塔机起重臂方向,顶升套架水平腹杆上,正对标准节主肢,在塔机顶升调平衡过程中,双向线性位移传感器获取到由于司机室会对塔机顶端产生侧向载荷或受施工现场风向风速的影响对塔机产生侧向风载荷,引起套架顶端产生侧向偏移的变化量。
[0052]
如图2所示,卷尺式行程限制装置的具体结构为:包括尺条210、可拆卸式卡环230、触点开关240、可拆卸式外壳220,尺条210安装于可拆卸式外壳220上,可拆卸式卡环230环绕固定在尺条210上,可随尺条卷入,触点开关240位于尺条出口处,尺条210长度为5m,尺条表面标有刻度,非工作状态收卷在可拆卸外壳220中,可拆卸式卡环230可根据所需限位距离,调节在尺条上的位置并固定锁死(如:所需限位长度为两米,就将可拆卸式卡环调节至尺条两米的刻度位置),并且可拆卸式卡环230可随卷尺条一同收卷。触点开关240位于尺条卷出位置,尺条卷出时,不会接触到触点开关,当可拆卸式卡环随尺条一同卷出时,卡环会触及触点开关,进行控制。可拆卸式外壳220可打开,用于调节可拆卸式卡环230的位置。卷尺式行程限制装置安装固定在顶升油缸上,尺条头部在油缸座上固定锁死,可拆卸式外壳 220安装在油缸外筒上,随油缸外筒进行移动,当顶升油缸顶升到设定距离后,对油缸动作进行限位控制。
[0053]
如图3所示,防冒顶限制装置安装在顶升套架四根主肢上,正对四根标准节主肢,防冒顶限制装置由夹紧固定支架460固定在顶升套架主肢上,通过旋动调节螺钮470推紧活动夹板480将固定支架460夹紧在顶升套架上,使安装传动支架固定端490紧贴在顶升套架主肢上。安装传动支架固定端490 与安装传动支架活动端410通过下头部的活页式连接方式连接,安装传动支架活动端410靠近标准节主肢,并在两者之间装有传动弹簧420,传动弹簧 420可以使安装传动支架活动端410在顶升套架移动过程中始终靠近标准节主肢。滚轮440安装在活动端410上头部,活动端410通过滚轮440紧贴在标准节主肢上,并随着顶升套架移动带动传动安装支架,可以使滚轮沿着标准节主肢滚动。滚轮中间轴上装有滚轮啮合齿轮450,并与行程限制器430上装有的啮合齿轮相互啮合,滚轮转动带动齿轮转动,最终带动行程限制器转动工作,进行顶升高度参数采集记录。行程限位器在实时获取到顶升高度变化数据过程中,若高度数据到达冒顶限制高度时,行程限位器进行限位,限制顶升套架继续进行顶升动作,防止冒顶现象发生。
[0054]
如图4所示,双向线性位移传感器结构组成主要包括:电阻式双向线性位移传感器1010,其内部主要包括两组电阻圈1011,中间通过宽度为5mm 的树脂隔圈格挡。在电阻圈和树脂隔圈内部设置有动片指针1013,动片指针初始位置位于树脂隔圈的中点位移,左右方向由弹簧1012连接,使动片指针可以左右移动连接到两边的电阻圈上。假设动片指针向左
移动距离为x,则此时电路中的电阻值为该电阻在电路所对应的电流值为同样,动片指针向左移动距离为x,则此时电路中的电阻值为该电阻在电路所对应的电流值为所以,设定左右移动距离x与左右两侧电流值的对应关系为:将电流关系转化为位移值即可得到顶升套架相对塔身的位移偏量。电阻式双向线性位移传感器1010通过中间旋转连杆1020与调节丝杠1030连接,中间旋转连杆1020可以保证调节丝杠1030 与电阻式位移传感器相互平行。调节丝杠上装有活动夹具1040,可以随调节丝杠的调节来进行收紧或放松,以便夹紧塔身标准节。同时在电阻式位移传感器外壳上装有固定捆扎带1050,可以用于安装到顶升套架上。安装时需注意,动片指针位于树脂隔圈的中点位置。双向线性位移传感器安装在顶升套架与标准节之间,当变幅小车从起重臂末端前进时,顶升套架相对于塔身会发生偏移,连接在标准节上的调节丝杠会相对与固定在顶升套架上的电阻式位移传感器外壳发生偏移,由于调节丝杠与电阻式位移传感器外壳之间通过中间旋转连杆连接,调节丝杠带动动片指针两侧弹簧产生位移,进而动片指针向一侧电阻圈偏移,将电阻圈两侧电流值转化为位移值,由于调节丝杠与电阻式位移传感器外壳相互平行,动片指针位移量与调节丝杠位移量相同,可以反映出顶升套架相对于塔身的位移量。
[0055]
本发明安全监测装置使用时,具体步骤为:步骤1,视频监测装置对塔机进行实时监测,通过塔机平衡状态监测装置进行平衡状态监测,同时找到塔机的平衡位置;
[0056]
步骤1中塔机平衡状态监测装置对塔机平衡状态的监测方法具体为:
[0057]
步骤1.1,建立坐标系:以起重臂方向为x方向,以垂直于起重臂方向为 y方向;
[0058]
步骤1.2:两个双向线性位移传感器分别监测x方向及y方向位移偏量,具体计算公式如下,
[0059]
x方向位移偏量l
x
计算公式为:
[0060][0061]
其中,h为顶升套架高度;e为顶升套架材料的弹性模量;i
x
为顶升套架截面沿x方向的惯性矩;m
x
为塔身在x方向所受弯矩,m为调平衡过程中起吊重物的质量;fw为风载荷;μ为变幅小车的幅度,且
△
x 为沿着x方向标准节与顶升套架之间的间隙;
[0062]
y方向位移偏量ly计算公式为:
[0063][0064]
其中,h为顶升套架高度;e为顶升套架材料的弹性模量;iy为顶升套架截面沿y方向的惯性矩;my为塔身在y方向所受弯矩;fw为风载荷;
△
y为沿着y方向标准节与顶升套架之
间的间隙。
[0065]
步骤1.3:根据步骤1.2的计算公式,分别计算x方向和y方向的相对于标准节位移偏量的最大值和最小值,计算公式如下,
[0066]
x方向相对于标准节的位移偏量l
px
计算公式为:
[0067]
l
px
=|l
x max-l
x min
|
[0068][0069][0070]
其中,l
x max
为x方向相对于标准节的位移偏量的最大值,l
x min
为x方向相对于标准节的位移偏量的最小值,h为顶升套架高度;e为顶升套架材料的弹性模量;i
x
为顶升套架截面沿x方向的惯性矩;m
xmin
为塔身在x方向所受的最小弯矩;m
xmax
为塔身在x方向所受的最大弯矩;m为调平衡过程中起吊重物的质量;fw为风载荷;μ
min
为0;
△
x为沿着x方向标准节与顶升套架之间的间隙;
[0071]
y方向相对于标准节的位移偏量l
py
计算公式为:
[0072]
l
py
=|l
y max-l
y min
|
[0073][0074][0075]
其中,l
y max
为y方向相对于标准节的位移偏量的最大值;l
y min
为y方向相对于标准节的位移偏量的最小值;h为顶升套架高度;e为顶升套架材料的弹性模量;iy为顶升套架截面沿y方向的惯性矩;m
ymin
为塔身在y方向所受的最小弯矩;m
ymax
为塔身在y方向所受的最大弯矩;fw为风载荷;
△
y为沿着y方向标准节与顶升套架之间的间隙;
[0076]
步骤1.4,根据步骤1.3的计算,得到顶升套架相对于标准节的位移偏量的安全平面区域为(l
px
,l
py
),当顶升套架相对于标准节的位移偏量超过安全区域则发出警报;
[0077]
塔机平衡状态监测装置可实时监测顶升套架相对于标准节的位移偏量,当顶升套架相对于标准节的位移偏量最小时,则为塔机的平衡位置,此位置时,终端处理器发出信号,提示工作人员已到达平衡状态。
[0078]
步骤2,找到平衡位置后,顶升套架上的顶升油缸动作,推动塔机顶升套架及以上的塔机组成部分向上移动,通过油缸行程限制装置进行检测控制,塔机进行一个周期的顶升中,需要将顶升套架3顶起稍微大于一个标准节1 的高度(如果标准节高度为4.8m,则需要顶起4.9m的高度),为了顶起这个高度,需要顶升油缸进行两次行程(即顶升油缸伸长一次的极限高度为4.45m 左右,为到达4.9m的高度,顶升油缸需要回缩,再伸长一次),顶升油缸完成第一次伸长之后,需要把顶升套架3通过爬爪卡在塔身2上,这个时候就需要摄像头一100拍摄爬爪是否卡在塔身2的固定位置;;
[0079]
步骤3,顶升套架到达顶升位置后,通过防冒顶限制装置监测顶升套架的位置;
[0080]
步骤4,顶升动作完成后,将一个标准节引进塔身位置进行安装,视频监测模块监测标准节的引进过程,完成安装。
[0081]
在本实施例中,顶升套架3与回转下支座4螺栓连接状态拍摄点位和主吊卷扬机拍摄点位就是在调平衡之前就开始监测;在完成调平衡过程后,塔机进行整个顶升过程,都需要运用塔机平衡状态监测装置对塔机整体平衡状态进行监测,无论哪个阶段出现塔机倾斜的情况,都可以发出报警信号。
[0082]
以上实施例仅为本发明的示例性实施例,不用于限制本发明,本发明的保护范围由权利要求书限定。本领域技术人员可以在本发明的实质和保护范围内,对本发明做出各种修改或等同替换,这种修改或等同替换也应视为落在本发明的保护范围内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1