环形穿梭车以及环形穿梭车物流输送系统的制作方法
1.本发明涉及物流输送技术领域,具体地说,是涉及一种环形穿梭车以及环形穿梭车物流输送系统。
背景技术:
2.近年来,随着物流行业的飞速发展,环形穿梭车已广泛应用于食品、医药、纤维制造等多种行业的自动化立体仓库及车间物流系统中,并以其灵活、准确且适应性强的特点,逐步获得广大用户的认可。
3.环形穿梭车由往复式穿梭车发展而来,传统意义上的往复式穿梭车沿直线轨道往复行驶,而环形穿梭车可沿环形轨道闭环行驶。相比较往复式穿梭车,环形穿梭车的输送能力较强,输送效率较高,且输送线整体布局紧凑,更加适用于车间生产型自动化物流系统。
4.现有的环形穿梭车多为两轮单轨结构或者四轮双轨结构。两轮单轨结构的环形穿梭车对轨道的要求较高,且轨道对车体的尺寸存在限制,若车体尺寸过大,转弯时易发生侧翻。此外两轮单轨结构的环形穿梭车的运行平衡性与稳定性较差,过弯时晃动较剧烈。四轮双轨结构的环形穿梭车,由于内外轮转弯时的轨迹半径不同,外侧车轮的转弯半径要大于内侧车轮的转弯半径,故转弯时内外轮无法同步滚动,造成内外侧行走轮相对滑动,加剧轮组的磨损,减少轮组的机械使用寿命。此外,该结构在过弯时由于惯性易导致轮组与导轨之间发生挤压和冲击,易产生振动和噪音。对于采用滑移组件补偿内外轮间距的穿梭车,其轮组结构比较复杂,制造成本较高,且过弯时车架相对轮组将产生滑动,搭载大重量货物运行时的穿梭车的稳定性及安全性较差。
技术实现要素:
5.本发明的目的是提供一种环形穿梭车以及环形穿梭车物流输送系统,结构简单,且平衡性以及稳定性高。
6.为了实现上述目的,本发明的环形穿梭车于一铺设于输送面上的环形轨道上行走,包括车架组件以及分别连接在所述车架组件上的输送组件和驱动行走组件,所述驱动行走组件包括驱动轮组、导向轮组以及支撑轮组。所述驱动轮组包括驱动件和由所述驱动件驱动的驱动轮,所述驱动轮于所述环形轨道的顶面滚动行走。所述导向轮组包括多个侧导轮,多个侧导轮分别由所述环形轨道的内侧和外侧卡接在所述环形轨道上。所述支撑轮组包括多个支撑轮,多个支撑轮连接在所述车架组件的底部,分别于所述环形轨道的内侧和外侧的输送面上行走。
7.上述的环形穿梭车的一实施方式中,所述驱动轮为一个,所述侧导轮为四个,两个所述侧导轮卡接于所述环形轨道的内侧,两个所述侧导轮卡接于所述环形轨道的外侧。
8.上述的环形穿梭车的一实施方式中,位于所述环形轨道内侧和外侧的侧导轮一一相对设置,所述驱动轮沿运行方向位于两个所述侧导轮之间。
9.上述的环形穿梭车的一实施方式中,所述驱动轮为一个,所述侧导轮为三个,其中
一个所述侧导轮卡接于所述环形轨道的内侧,另两个所述侧导轮卡接于所述环形轨道的外侧;或其中两个所述侧导轮卡接于所述环形轨道的内侧,另一个所述侧导轮卡接于所述环形轨道的外侧。
10.上述的环形穿梭车的一实施方式中,所述支撑轮至少为三个。
11.上述的环形穿梭车的一实施方式中,所述支撑轮为弹簧减震万向轮结构。
12.上述的环形穿梭车的一实施方式中,所述驱动行走组件为多个。
13.上述的环形穿梭车的一实施方式中,所述驱动行走组件为两个,沿运行方向设置于所述输送组件的两侧。
14.本发明的环形穿梭车物流输送系统包括环形轨道和于所述环形轨道上行走的环形穿梭车,其中,所述环形穿梭车为上述的环形穿梭车。
15.上述的环形穿梭车物流输送系统的一实施方式中,所述环形轨道为单轨结构。
16.本发明的有益功效在于,本发明的环形穿梭车以及环形穿梭车物流输送系统,克服了单轨环形穿梭车平衡性与稳定性较差的缺点,又避免了双轨环形穿梭车内外侧轮组与导轨打滑磨损的缺陷,本发明提供的环形穿梭车在转弯时的平衡性与稳定性较高,更加适用于运输大尺寸、大重量货物,轮组的机械使用寿命较长,穿梭车运行时的安全性较高,且轮组结构相对简单,制造成本较低。
17.以下结合附图和具体实施例对本发明进行详细描述,但不作为对本发明的限定。
附图说明
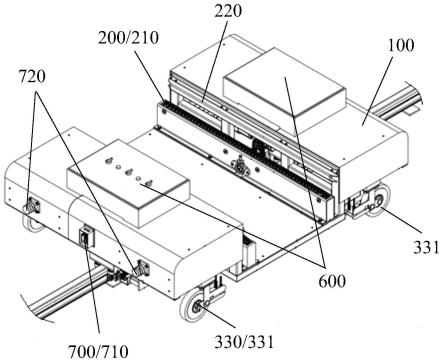
18.图1为本发明的环形穿梭车物流输送系统的一实施例的结构图;
19.图2为本发明的环形穿梭车的一实施例的结构图(第一视角);
20.图3为本发明的环形穿梭车的一实施例的结构图(第二视角);
21.图4为本发明的环形穿梭车的驱动行走组件一实施例的结构图(局部);
22.图5为图4的底视图。
23.其中,附图标记
24.10:环形轨道
25.20:环形穿梭车
26.100:车架组件
27.200:输送组件
28.210:链式输送机
29.220:导向装置
30.300:驱动行走组件
31.310:驱动轮组
32.311:驱动件
33.312:驱动轮
34.313:轮箱
35.314:回转支承
36.315:定位套
37.316:带座轴承
38.317:传动轴
39.320:导向轮组
40.321:侧导轮
41.330:支撑轮组
42.331:支撑轮
43.400:供电装置
44.500:检测装置
45.600:电控装置
46.700:安全防撞装置
47.710:红外激光防撞件
48.720:聚氨酯防撞件
具体实施方式
49.下面结合附图和具体实施例对本发明技术方案进行详细的描述,以更进一步了解本发明的目的、方案及功效,但并非作为本发明所附权利要求保护范围的限制。
50.如图1所示,本发明的环形穿梭车物流输送系统包括环形轨道10和环形穿梭车20,环形穿梭车20于环形轨道10上行走。环形穿梭车20用于在环形轨道10上运输货物,环形轨道10例如为单轨结构。一般来说,环形轨道10铺设在地面上,但本发明不以为限。
51.其中,如图2至图5所示,环形穿梭车20包括车架组件100、输送组件200以及驱动行走组件300,输送组件200以及驱动行走组件300分别连接在车架组件100上。
52.本发明的环形穿梭车20还包括供电装置400、检测装置500、电控装置600以及安全防撞装置700,以下就各部分结构进行详细说明。
53.驱动行走组件300包括驱动轮组310、导向轮组320以及支撑轮组330,其中,驱动轮组310包括驱动件311和由驱动件311驱动的驱动轮312,驱动轮312于环形轨道10的顶面滚动行走,从而带动车架组件100及其上部件沿环形轨道10输送。驱动件311例如是驱动电机,为驱动轮312提供动力。导向轮组320包括多个侧导轮321,多个侧导轮321分别由环形轨道10的内侧和外侧卡接在环形轨道10上。支撑轮组330包括多个支撑轮331,多个支撑轮331连接在车架组件100的底部,分别于环形轨道10的内侧和外侧的输送面上行走。
54.本发明中,驱动轮组310和支撑轮组330作为环形穿梭车20的运行机构设置于车架组件100的下方,其中驱动轮组310运行于环形轨道10上,支撑轮组330运行于地面上,驱动轮组310和支撑轮组330均对环形穿梭车20提供支撑作用。导向轮组320设置于驱动轮组310的下方,并卡在环形轨道10两侧,为环形穿梭车20提供导向。本发明中,驱动轮组310、导向轮组320以及支撑轮组330于环形穿梭车20协同作用,保证环形穿梭车20在环形轨道10上平衡稳定行走。
55.详细来说,驱动轮组310作为环形穿梭车20的主动运行机构设置于车架组件100下方,驱动轮组310还包括轮箱313、回转支承314、定位套315、带座轴承316以及传动轴317,为环形穿梭车20提供驱动力和支撑。轮箱313通过回转支承314旋转连接在机架组件100的下方,驱动轮312通过定位套315固定连接在传动轴317上,传动轴317通过带座轴承316旋转连接在轮箱313上。驱动件311的固定端通过电机支座与轮箱313固定连接,驱动件311的输出
轴与传动轴317同轴线传动连接,为驱动轮312提供动力。
56.导向轮组320作为环形穿梭车20的导向机构设置于驱动轮组310下方,详细来说,导向轮组320与轮箱313固定连接,并沿驱动轮312的运行方向布置在环形轨道10的两侧,每个侧导轮321与环形轨道10的侧面滚动配合。转弯时,在导向轮组320的作用下,侧导轮321可旋转一定角度以完成转弯动作。
57.支撑轮组330作为环形穿梭车20的从动运行机构设置于车架组件100下方,能为环形穿梭车20提供辅助支撑作用,保证环形穿梭车20载货运行时的平衡性与稳定性。支撑轮组330的支撑轮331为弹簧减震万向轮结构,与车架组件100固定连接,为环形穿梭车20提供辅助支撑和从动。弹簧减震万向轮可补偿地面不平的高度差,保证支撑轮组330始终与地面接触,并随着驱动轮组310的运行沿地面从动运行。
58.本发明中,驱动行走组件300可以设置为一个,也可以根据需要设置为多个,即本发明的环形穿梭车20可以是单轮驱动或者多轮驱动。
59.本实施例中,驱动行走组件300为沿运行方向设置于输送组件200的两侧的两个。每一个驱动行走组件300均具有驱动轮组310、导向轮组320以及支撑轮组330。以其中一个驱动行走组件300为例,驱动轮312为一个,侧导轮321为四个,两个侧导轮321卡接于环形轨道10的内侧,两个侧导轮321卡接于环形轨道10的外侧。进一步地,位于环形轨道10内侧和外侧的侧导轮321一一相对设置,驱动轮312沿运行方向位于两个侧导轮321之间。或者是说,其中两个侧导向轮321沿运行方向相对设置于驱动轮312的前侧,另两个侧导向轮321沿运行方向相对设置于驱动轮312的后侧。
60.在其它实施例中,可以设置侧导轮321为三个,其中一个侧导轮321卡接于环形轨道10的内侧,另两个侧导轮321卡接于环形轨道10的外侧;或其中两个侧导轮321卡接于环形轨道10的内侧,另一个侧导轮321卡接于环形轨道10的外侧。较佳地,驱动轮312沿运行方向位于两个侧导轮321之间。
61.本实施例中,每一个驱动行走组件300均设置了位于环形轨道10的内侧的地面行走以及位于环形轨道10的外侧的地面行走的支撑轮331,于内侧和外侧的输送面上行走,四个支撑轮331分别位于矩形的车架组件100的四个拐角。
62.在其它实施例中,也可以设置三个支撑轮331,其中一个设置于环形轨道10的内侧的地面行走,另两个设置于环形轨道10的外侧的地面行走,或者其中两个设置于环形轨道10的内侧的地面行走,另一个设置于环形轨道10的外侧的地面行走,也可以达到稳定支撑的目的。
63.车架组件100为起主要承载作用的主体框架,为环形穿梭车20的其它组件起支撑作用,车架组件100例如可由型材焊接而成,工艺简单、成本低。
64.输送组件200设置于车架组件100的上方并作为货物的搬运移栽机构,包括链式输送机210和导向装置220。链式输送机210设置在车架组件100的上部,两组链式输送机210对称布置,导向装置220沿链条传动的方向设置,以保证货物按链条传动轨迹完成转运。此处链式输送机210和导向装置220为本领域技术人员的公知常识。需要说明的是,输送组件200还可以采用本领域其它通用的技术,例如辊筒输送机等,本领域技术人员可根据实际情况进行选择。
65.供电装置400为环形穿梭车20提供电力供应,包括集电臂组件与滑触线组件,集电
臂组件设置在轮箱313上,可随轮箱313旋转,滑触线组件设置在环形轨道10的内侧面。当然,供电装置400也可以采用非接触式供电的方式,本发明不以为限。
66.检测装置500包括读码装置和条形码,为环形穿梭车20提供位置识别,读码装置设置在轮箱313上,可随轮箱313旋转,条形码设置在环形轨道10的外侧面。当然,检测装置500也可以更改为编码器检测或认址片检测的方式,本发明不以为限。
67.电控装置600为环形穿梭车20提供设备配电和控制,电控装置600包括电控柜和配电箱,具体的,电控柜和配电箱均设置在车架组件100上。
68.安全防撞装置700为环形穿梭车20运行时提供必要的安全保障。安全防撞装置700包括电气防撞和机械防撞,电气防撞和机械防撞设置在环形穿梭车20运行方向上。具体的,电气防撞可为红外激光测距防撞件710,机械防撞可为聚氨酯缓冲器防撞件720,红外激光防撞件710和聚氨酯防撞件720均设置在车架组件100上。
69.综上,本发明提供的环形穿梭车20的工作原理是:
70.环形穿梭车20上的驱动件311带动驱动轮312转动,从而驱动环形穿梭车20沿环形轨道10运行。当环形穿梭车20经过弯道时,导向轮组320与环形轨道10之间产生的作用力使得驱动轮312旋转一定角度,从而实现环形穿梭车20的转弯过程。支撑轮组330在环形穿梭车20运行过程中,通过弹簧减震万向轮331始终运行于地面上,并跟随驱动轮312作从动运行,支撑轮组330可为环形穿梭车20提供辅助支撑作用。输送组件200通过链式输送机210和导向装置220完成货物在环形穿梭车20上的搬运工作。供电装置400、检测装置500及电控装置600为环形穿梭车20的运行提供电力供应和电气控制。安全防撞装置700为穿梭车的运行提供必要的安全保障。
71.当然,本发明还可有其它多种实施例,在不背离本发明精神及其实质的情况下,熟悉本领域的技术人员当可根据本发明作出各种相应的改变和变形,但这些相应的改变和变形都应属于本发明所附的权利要求的保护范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1