一种全智能真空封口机的制作方法
1.本发明涉及包装设备技术领域,具体涉及一种全智能真空封口机。
背景技术:
2.真空封口机是将食品装入包装袋,通过真空泵抽出包装袋内的空气,达到预定真空度后,再通过热封条对包装袋进行热封,完成封口工序,有效的防止了食物的变质,其次,因为真空包装容器内部气体的排除,加速了热量的传导,这即可提高热杀菌效率,也避免了加热杀菌时由于气体的膨胀而使包装容器破裂。
3.目前家用或商用的封口机对出袋和切袋的尺寸没有一个个性实际需求的指标,造成在实际使用上要么只能用市面上规格的尺寸,要么只能随意切袋大小,但此种方式均不能很匹配实际需要时要用到尺寸规格,最后要么多了要么少了的状况。
4.一般家用真空封口机或商用真空封口机都需要将机身上盖打开,再将真空袋放进真空槽中,再将上盖用锁扣或用手按压上盖与下座之间的真空槽中,再通过开始按键进行真空封口过程,最后再按压机械开盖放气,完成整个需要的真空封口需求。针对这种多操作动作来完成真空封口需求,这种效率低且繁琐的方式,且部分按压力道对老年人和部分女性不是很友好。
技术实现要素:
5.本发明的目的就在于解决上述背景技术的问题,而提出一种全智能真空封口机。
6.本发明的目的可以通过以下技术方案实现:
7.一种全智能真空封口机,包括壳体,所述壳体上安装有出袋机构和切袋机构;
8.所述出袋机构包括有驱动部和轮,所述轮与所述壳体转动连接,所述驱动部固定安装在所述壳体上,所述驱动部的输出端与轮连接;
9.所述切袋机构包括有移动组件和切割部,所述切割部安装在移动组件上,所述移动组件安装在所述壳体内,所述移动组件带动切割部在所述壳体内移动。
10.作为本发明进一步的方案:所述出袋机构还包括有皮带和齿轮,所述皮带套在所述轮上,所述齿轮固定在所述轮的一侧。
11.作为本发明进一步的方案:所述皮带表面设置有防滑凸块或防滑纹。
12.作为本发明进一步的方案:所述移动组件包括有螺纹杆、移动块和电机,所述螺纹杆穿插在所述壳体上转动,所述移动块与所述螺纹杆螺纹连接,所述电机的输出端与所述螺纹杆连接。
13.作为本发明进一步的方案:所述切割部是刀头。
14.作为本发明进一步的方案:所述壳体上还安装有封口机构,所述封口机构包括有热封机构、伸缩件、密封组件和真空装置,所述密封组件和所述热封机构相互连接,所述伸缩件安装在密封组件上,所述壳体内位于封口机构处还形成有密封槽。
15.作为本发明进一步的方案:所述壳体内还安装有感应装置。
16.作为本发明进一步的方案:所述密封组件包括有盖板、密封条一和密封条二,所述密封条一固定在所述盖板底部,所述密封条二固定在密封槽顶部,所述密封条一与所述密封条二形状相同尺寸相等。
17.作为本发明进一步的方案:所述热封机构包括有热封条一和热封条二,所述热封条一通过固定在一旁的连接件与密封组件连接,所述热封条二固定在壳体上位于密封槽一旁。
18.作为本发明进一步的方案:所述真空装置是真空泵,所述真空泵通过管体与密封槽连通。
19.本发明的有益效果:
20.通过设计有出袋机构和切袋机构,从而操作人员可以根据自主选择需要的真空袋尺寸,来最大限度匹配实际需求,减少了真空袋偏大或偏小的浪费,进而提升后续真空袋里面实物的匹配性。
21.通过设计有自动封口机构,解决了整改真空袋放入真空槽后可自动真空封口,不需要再手动操作按压来固定真空袋动作和封口的操作,可能减少操作者的操作步骤,使得封口更加便捷。
附图说明
22.下面结合附图对本发明作进一步的说明。
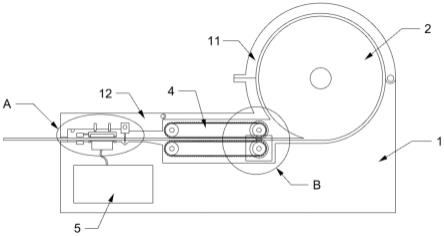
23.图1是本发明的结构示意图;
24.图2是本发明图1中a处的放大图;
25.图3是本发明图1中b处的放大图;
26.图4是本发明中封口机构局部的结构示意图;
27.图5是本发明中壳体的剖面示意图。
28.图中:1、壳体;11、盖体一;12、盖体二;2、真空袋;4、出袋机构;41、驱动部;42、轮;43、皮带;44、齿轮;5、封口机构;51、盖板;52、密封条一;53、伸缩件;54、密封条二;55、密封槽;61、螺纹杆;62、移动块;63、刀头;64、切割槽;71、热封条一;72、热封条二;73、连接件。
具体实施方式
29.下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有作出创造性劳动前提下所获得的所有其它实施例,都属于本发明保护的范围。
30.实施例一,请参阅图1-5所示,本发明为一种全智能真空封口机,包括壳体1,所述壳体1上安装有出袋机构4和切袋机构;
31.其中,壳体1上形成有盖体一11和盖体二12,盖体一11和盖体二12都是通过铰链或合页与壳体1转动连接的;
32.其中,盖体一11是通过卡扣与壳体1固定,卡扣为金属卡扣。
33.其中,盖体二12内装有真空袋2;
34.所述出袋机构4包括有驱动部41和轮42,所述轮42与所述壳体1转动连接;
35.其中,轮42用于对真空袋2进行挤压并且传输真空袋2;
36.其中,轮42中心处固定穿插有杆体,轮42通过杆体在壳体1上转动;
37.所述驱动部41固定安装在所述壳体1上,所述驱动部41的输出端与轮42连接;
38.其中,驱动部41可以是步进电机,步进电机通过杆体带动轮42进行转动;
39.所述出袋机构4还包括有皮带43和齿轮44,所述皮带43套在所述轮42上,所述齿轮44固定在所述轮42的一侧;
40.其中,轮42数量为4个,两两对应,皮带43套在两个轮42上,第一个轮42转动将会通过皮带43带动第二个轮42转动;
41.其中,齿轮44数量为2个,且2个齿轮44相互啮合。
42.所述皮带43表面设置有防滑凸块或防滑纹,防滑凸块或防滑纹的作用是避免在带动拉扯真空袋2进行移动的过程中发生打滑。
43.所述切袋机构包括有移动组件和切割部,所述切割部安装在移动组件上,所述移动组件安装在所述壳体1内,所述移动组件带动切割部在所述壳体1内移动;
44.其中,移动组件具体是安装在壳体1上的盖体一11上;
45.其中,在壳体1内部位于切袋机构下方形成有凹陷的切割槽64,凹陷具体形状为“v”形。
46.所述移动组件包括有螺纹杆61、移动块62和电机,所述螺纹杆61穿插在所述壳体1上转动,所述移动块62与所述螺纹杆61螺纹连接,所述电机的输出端与所述螺纹杆61连接;
47.其中,盖体一11上开设有滑槽,移动块62在滑槽内进行滑动;
48.其中,电机也可以是步进电机。
49.所述切割部是刀头63。
50.实施例二,请参阅图1-5所示,本发明为一种全智能真空封口机,包括壳体1,所述壳体1上安装有出袋机构4和切袋机构;
51.其中,壳体1上形成有盖体一11和盖体二12,盖体一11和盖体二12都是通过铰链或合页与壳体1转动连接的;
52.其中,盖体二12内装有真空袋2;
53.所述出袋机构4包括有驱动部41和轮42,所述轮42与所述壳体1转动连接;
54.其中,轮42用于对真空袋2进行挤压并且传输真空袋2;
55.其中,轮42中心处固定穿插有杆体,轮42通过杆体在壳体1上转动;
56.所述驱动部41固定安装在所述壳体1上,所述驱动部41的输出端与轮42连接;
57.其中,驱动部41可以是步进电机,步进电机通过杆体带动轮42进行转动;
58.所述出袋机构4还包括有皮带43和齿轮44,所述皮带43套在所述轮42上,所述齿轮44固定在所述轮42的一侧;
59.其中,轮42数量为4个,两两对应,皮带43套在两个轮42上,第一个轮42转动将会通过皮带43带动第二个轮42转动;
60.其中,齿轮44数量为2个,且2个齿轮44相互啮合。
61.所述皮带43表面设置有防滑凸块或防滑纹,防滑凸块或防滑纹的作用是避免在带动拉扯真空袋2进行移动的过程中发生打滑。
62.所述切袋机构包括有移动组件和切割部,所述切割部安装在移动组件上,所述移
动组件安装在所述壳体1内,所述移动组件带动切割部在所述壳体1内移动;
63.其中,移动组件具体是安装在壳体1上的盖体一11上;
64.所述移动组件包括有螺纹杆61、移动块62和电机,所述螺纹杆61穿插在所述壳体1上转动,所述移动块62与所述螺纹杆61螺纹连接,所述电机的输出端与所述螺纹杆61连接;
65.其中,盖体一11上开设有滑槽,移动块62在滑槽内进行滑动;
66.其中,电机也可以是步进电机。
67.所述切割部是刀头63。
68.所述壳体1上还安装有封口机构5,所述封口机构5包括有热封机构、伸缩件53、密封组件和真空装置;
69.伸缩件53可以是电动伸缩杆;
70.所述密封组件和所述热封机构相互连接,所述伸缩件53安装在密封组件上,所述壳体1内位于封口机构5处还形成有密封槽55;
71.其中,所述真空装置是真空泵,所述真空泵通过管体与密封槽55连通。
72.所述壳体1内还安装有感应装置。
73.其中,感应装置具体是红外感应器。
74.所述密封组件包括有盖板51、密封条一52和密封条二54,所述密封条一52固定在所述盖板51底部,所述密封条二54固定在密封槽55顶部,所述密封条一52与所述密封条二54形状相同尺寸相等;
75.其中,密封条一52和密封条二54形状均为环形结构;
76.所述热封机构包括有热封条一71和热封条二72,所述热封条一71通过固定在一旁的连接件73与密封组件连接,所述热封条二72固定在壳体1上位于密封槽55一旁。
77.热封条一71和热封条二72均为条形结构。
78.需要外置控制器对封口机进行控制。
79.具体操作原理如下:
80.盖体一11掀开后可放入卷筒状的真空袋2。
81.驱动部41启动后将会通过杆体带动轮42进行旋转,而轮42在转动时将会带动皮带43进行移动,而真空袋2袋头将会被皮带43携带向前进行移动。
82.步进电机带动螺纹杆61转动,从而螺纹杆61通过转动使得移动块62在壳体1中的滑槽内进行滑动平移,从而刀头63在平移的过程中对真空袋2切断。
83.电动伸缩杆的伸缩带动盖板51在壳体1内垂直移动,盖板51垂直下压的过程中密封条一52将会与密封条二54贴合。
84.盖板51垂直运动的过程中热封条二72也将会与其热封条一71贴合。
85.具体操作流程如下:
86.操作人员通过控制器将驱动部41开启,从而出袋机构4进行运转对真空袋2袋头拉扯,从而出袋机构4将其真空袋2通过挤压运输出封口机,操作人员可通过控制驱动部41,从而调节真空袋2出袋长度。
87.出袋后操作人员可通过控制切袋机构将真空袋2切断,再通过封口机构5中的热封条一71和热封条二72将真空袋2袋尾热封,随后操作人员取出。
88.当操作人员用使用真空袋2内装材料后需要再进行封口时,操作人员将盖体一11
掀开,将真空袋2头塞入密封槽55中,随后盖住盖体一11,并且使用卡扣固定,随后通过密封组件将其进行密封后使用真空泵将其真空袋2中的空气抽出,再通过热封条一71和热封条二72进行封口。
89.值得注意的是,当盖住盖体一11后,红外线感应器将会感应到真空袋2的存在,将会自动启动封口机构5对真空袋2进行封口操作。
90.以上对本发明的一个实施例进行了详细说明,但所述内容仅为本发明的较佳实施例,不能被认为用于限定本发明的实施范围。凡依本发明申请范围所作的均等变化与改进等,均应仍归属于本发明的专利涵盖范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1