一种立体密集库系统及其作业方法与流程
1.本发明涉及立体密集库技术领域,涉及一种立体密集库系统及其作业方法。
背景技术:
2.立体库作为现代物流系统中的重要组成部分,是用立体仓库设备可实现仓库高层合理化,存取自动化,操作简便化。随着自动化立体库货架在市场上不断的流行,为了完善立体库的功能和进一步扩大立体库的市场,货架行业也开始不断地推出各种类型的立体库,其中贯通式立体库由于其空间利用率高、叉车等作业车辆可直接驶入(其货架被称为驶入式货架)、对其他仓储设备的消耗小(只在货架两端工作)等特点,日益成为当前立体库的一种主流形式。
3.目前贯通式立体库中一般采用地台板配合进行仓储运输工作,为方便作业车辆叉取货物,同时为保证地台板能够满足满足较大重量的货物存储需要,地台板一般采用川字板,由于贯通式立体库无水平方向的固定架,水平方向上仅是利用地台板与立体库侧架配合形成支撑面,为保证地台板在货物的压力下不发生断裂等危险,川字板需按照特定方向布置即川字板底部的加强筋与货架长度方向垂直。
4.目前贯通式立体库均是采用升降叉车配合作业,由于升降叉车的结构特性,其配重较大,这导致目前的贯通式立体库一般是布置在底层的(如布置在楼上,楼面载荷过大,存在安全风险),同时其整体长度较大,转弯半径较大,即为保证升降叉车的运行便利性,需设置冗余度较大的过道等空间,这大大影响了贯通式立体库的库容量,此外升降叉车成本较高,特别是在仓储自动化程度越来越高的当下,这大大增加了贯通式立体库自动化的实现成本。
5.因此,开发一种库容量大、成本低廉、作业面载荷较小、可方便布置的贯通式立体库系统极具现实意义。
技术实现要素:
6.由于现有技术存在上述缺陷,本发明提供了一种库容量大、成本低廉、作业面载荷较小、可方便布置的贯通式立体库系统,以克服现有贯通式立体库系统库容量小、自动化改造成本高且作业面载荷过大的缺陷。
7.为了实现上述目的,本发明提供以下技术方案:
8.一种立体密集库系统,包括存储物料用的贯通式立体库、辅助升降装置和地牛式升降agv叉车;
9.所述辅助升降装置用于将入库的待作业货物举升到一定高度或将出库的待作业货物降到地面,包括底座、升降机构和取/放货平台,所述升降机构固定设置于所述底座的一侧,所述取/放货平台与所述升降机构连接以在所述升降机构的带动下上下升降,所述取/放货平台包括货叉和与所述货叉连接的连接结构,在位于所述货叉的正下方的地面上设置有与所述货叉匹配的凹槽,以在所述货叉下降至最低位置时,所述货叉的上表面与所
述地面的上表面齐平或低于所述地面的上表面,所述货叉呈u形;
10.所述地牛式升降agv叉车用于将入库的待作业货物从辅助升降装置运输至贯通式立体库中的目标库位或将出库的待作业货物从贯通式立体库中的库位运输至辅助升降装置,地牛式升降agv叉车的两叉臂外侧边之间的间距小于所述u形货叉两侧的最大间距。上述辅助升降装置为现有技术,其可为如cn208516884u所记载的用于实现agv和搬运叉车配合运输的升降装置,当然其他能够实现类似功能的装置也可适用。
11.本发明的立体密集库系统,采用辅助升降装置和地牛式升降agv叉车的巧妙配合能够实现立体密集库的运转作业,首先辅助升降装置辅助地台板升高到一定高度以便地牛式升降agv叉车驶入其下,即地牛式升降agv叉车的叉臂此时与地台板的加强筋结构接触,而后利用地牛式升降agv叉车举升地台板并驶入贯通式立体库内将地台板放置到目标位置,相比于现有技术采用的升降叉车,本发明的地牛式升降agv叉车转弯半径小,能够大大缩小运行所需的冗余空间即增大库容量,同时由于其作业特性,其无需配重模块,大大减轻了重量,能够大大减小作业面的载荷,能够更为方便地布置立体密集库,同时地牛式升降叉车成本较低,改造成本更低,本发明所采用的地牛式升降叉车与现有的地牛式叉车结构相同,区别仅在于其叉臂升降的调整幅度更大而已,其叉臂升降过程稳定性好。
12.作为优选的技术方案:
13.如上所述的一种立体密集库系统,所述贯通式立体库采用零散库位设计、零散库位及批量库位组合设计或批量库位设计,当然采用零散库位设计相比之下库容量增加不大,但其空置率低且每个库位均可存储不同物料;采用零散库位及批量库位组合设计,库容量增加较为明显,但空置率比零散库位设计稍高;采用全批量库位设计,库容量增加最多,但其空置率也比较高;
14.所述地牛式升降agv叉车设有激光导航模块,利用所述激光导航模块即可实现agv叉车的准确导航。
15.如上所述的一种立体密集库系统,所述辅助升降装置布置在贯通式立体库的进/出口处,此种设计能够避免外部叉车进入库内,即库内使用的为地牛式升降agv叉车,其所需的通道空间小,能够实现库内库位的最大化利用。当然如贯通式立体库均采用川字地台板作为地台板的话,也可将辅助升降装置布置在贯通式立体库内横纵通道交汇处,辅助升降装置布置在该处,外部叉车最好采用与库内叉车一样的叉车,能够减少所需设备的类型,降低采购/维护成本,方便后期调度,以提高空间利用率。当然本领域技术人员也可根据现场实际情况合理布置辅助升降装置,以上仅给出部分可行的技术方案而已。
16.如上所述的一种立体密集库系统,所述贯通式立体库采用的地台板为川字地台板,所述地牛式升降agv叉车的两叉臂的间距及叉臂的宽度与所述川字地台板匹配;
17.所述地牛式升降agv叉车还用于将入库的待作业货物从起始位置运输至辅助升降装置或将出库的待作业货物从辅助升降装置运输至目标位置。
18.如上所述的一种立体密集库系统,所述贯通式立体库采用的地台板为田字地台板;
19.所述立体密集库系统还包括叉齿式平衡重叉车(其他可进行田字地台板运输的叉车也可适用于本发明,此处仅给出一种可行技术方案而已),所述叉齿式平衡重叉车用于将入库的待作业货物从起始位置运输至辅助升降装置或将出库的待作业货物从辅助升降装
置运输至目标位置。由于辅助升降装置布置在贯通式立体库的进口或出口处即叉齿式平衡重叉车在贯通式立体库外作业,其不影响库内空间。
20.本发明虽然仅列举了田字地台板、川字地台板这两种类型的地台板,但本发明实际上也可适用于其他类型的地台板,如六脚板或者九脚板等,当然由于六脚板或者九脚板的特性,其无需辅助升降装置配合,其采用地牛式升降agv叉车即可完成运输/升降等动作,当然由于此类地台板长期存放存在变形/塌陷的风险,其需配合wms智能移库软件使用。
21.本发明同时提供了如上所述的一种立体密集库的作业方法,包括以下步骤:
22.(1)将待作业货物自起始位置运输至辅助升降装置处,将待作业货物放置在货叉上,如待作业货物下的地台板为川字地台板,此时川字地台板的插孔方向与货叉的开口方向垂直;
23.(2)辅助升降装置作业,货叉带动待作业货物升起一定高度,所述一定高度大于地牛式升降agv叉车叉臂最低状态下叉臂与地面的间距;
24.(3)地牛式升降agv叉车的叉臂沿着货叉的开口方向进入待作业货物的下方,此时地台板位于地牛式升降agv叉车的叉臂的上方;
25.(4)地牛式升降agv叉车的叉臂升起将待作业货物举升至指定高度;
26.(5)地牛式升降agv叉车将待作业货物运输至贯通式立体库中待作业货物的目标位置,地牛式升降agv叉车的叉臂下降直至地台板与货架支托接触即完成待作业货物的入库。待作业货物的出库作业流程与上述入库作业流程基本相反。上述作业方法操作简单,利用地牛式升降agv叉车即可实现对地台板的出入库作业,地牛式升降agv叉车结构紧凑、成本低廉,极具应用前景。
27.作为优选的技术方案:
28.如上所述的作业方法,所述待作业货物下的地台板为川字地台板;
29.所述将待作业货物自起始位置运输至辅助升降装置处的叉车为地牛式升降agv叉车;
30.所述地牛式升降agv叉车叉取过程具体如下:
31.所述地牛式升降agv叉车的叉臂自川字地台板的插孔插入后地牛式升降agv叉车的叉臂升起,待作业货物与地面脱离接触。即立体密集库采用同一类作业车辆进行作业,不仅能够大大减少后勤维护保养的成本,而且能够更为方便地安排作业车辆的调度方案,进而提高作业车辆的利用率,降低立体密集库的运行成本。
32.如上所述的作业方法,所述地牛式升降agv叉车分为两组,一组负责将待作业货物自起始位置运输至辅助升降装置处,另一组负责将待作业货物自辅助升降装置处运输至贯通式立体库中待作业货物的目标位置。其为本发明的一种可行的技术方案,当然本领域技术人员可根据实际情况对地牛式升降agv叉车进行调度。
33.如上所述的作业方法,负责将待作业货物自起始位置运输至辅助升降装置处的地牛式升降agv叉车与负责将待作业货物自辅助升降装置处运输至贯通式立体库中待作业货物的目标位置的地牛式升降agv叉车可为同一台车或者为不同车。
34.如上所述的作业方法,所述待作业货物下的地台板为田字地台板;
35.所述将待作业货物自起始位置运输至辅助升降装置处的叉车为叉齿式平衡重叉车,其他可适用于运输田字地台板的叉车也可适用于本发明。
36.本发明还提供一种可行的替代方案,其可适用于已有堆高agv车的用户,即堆高agv车为现有设备,方案具体为利用堆高agv车替换地牛式agv叉车完成上、下库位作业,同时采用地牛式agv叉车将入库的待作业货物从起始位置运输至辅助升降装置或将出库的待作业货物从辅助升降装置运输至目标位置,该方案以川字地台板作为库选地台板,由于其利用地牛式agv叉车插取地面上的地台板,因此地台板为川字地台板,当然如地牛式叉车可适用的其他类型的地台板也可适用于本发明,此处考虑选用川字地台板主要是考虑地台板的耐久性及适用性。该方案可相应减少地牛式agv叉车的配置数量,同时地牛式agv叉车的升降高度无需增高。
37.其作业方法,包括以下步骤:
38.(1)地牛式agv叉车叉取地面上的待作业货物,所述待作业货物下方布置有川字地台板,地牛式agv叉车的叉臂自川字地台板的插孔插入后地牛式agv叉车的叉臂升起,待作业货物与地面脱离接触;
39.(2)地牛式agv叉车将待作业货物运输至辅助升降装置处,将待作业货物放置在货叉上;
40.(3)辅助升降装置作业,货叉带动待作业货物升起一定高度,所述一定高度大于堆高agv车收缩状态下的最大高度;
41.(4)地牛式agv叉车自待作业货物下方撤出,堆高agv车驶入待作业货物下方且其位置与货叉的通孔位置匹配,此时地台板位于堆高agv车的上方;
42.(5)堆高agv车的顶升板升起将待作业货物举升至指定高度;
43.(6)堆高agv车将待作业货物运输至贯通式立体库中待作业货物的目标位置,堆高agv车的顶升板下降直至川字地台板与货架支托接触即完成待作业货物的入库。待作业货物的出库作业流程与上述入库作业流程基本相反。
44.以上技术方案仅为本发明的一种可行的技术方案而已,本发明的保护范围并不仅限于此,本领域技术人员可根据实际需求合理调整具体设计。
45.上述发明具有如下优点或者有益效果:
46.(1)本发明的立体密集库系统,采用辅助升降装置和地牛式升降agv叉车的巧妙配合能够实现立体密集库的运转作业,首先利用地牛式升降agv叉车将地台板运输至辅助升降装置处,辅助升降装置辅助地台板升高到一定高度以便地牛式升降agv叉车驶入其下,即地牛式升降agv叉车的叉臂此时与川字地台板的加强筋结构接触,而后利用地牛式升降agv叉车举升地台板并驶入贯通式立体库内将地台板放置到目标位置;
47.(2)本发明的立体密集库系统,采用的地牛式升降agv叉车相比于现有技术的升降叉车,其转弯半径小,能够大大缩小运行所需的冗余空间即增大库容量,同时由于其作业特性,其无需配重模块,大大减轻了重量,能够大大减小作业面的载荷,能够更为方便地布置立体密集库,同时地牛式升降叉车成本较低,改造成本更低;
48.(3)本发明的立体密集库系统的作业方法,操作简单,利用地牛式升降agv叉车即可实现对川字地台板的出入库作业,采用同一类作业车辆进行作业,不仅能够大大减少后勤维护保养的成本,而且能够更为方便地安排作业车辆的调度方案,进而提高作业车辆的利用率,降低立体密集库的运行成本,极具应用前景。
附图说明
49.通过阅读参照以下附图对非限制性实施例所作的详细描述,本发明及其特征、外形和优点将会变得更加明显。在全部附图中相同的标记指示相同的部分。并未按照比例绘制附图,重点在于示出本发明的主旨。
50.图1为现有技术的库位量最大的立体密集库的布局图;
51.图2为实施例1、4的的立体密集库的布局图;
52.图3为实施例2、5的的立体密集库的布局图;
53.图4为实施例3、6的的立体密集库的布局图;
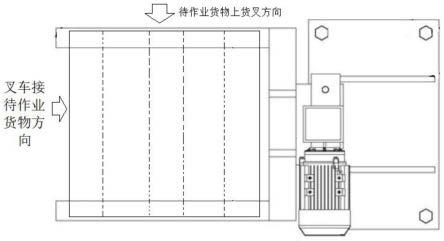
54.图5为待作业货物上下货叉的方向示意图(图中虚线框表示川字地台板底部的加强筋);
55.其中,1-辅助升降装置。
具体实施方式
56.下面结合附图和具体的实施例对本发明中的结构作进一步的说明,但是不作为本发明的限定。
57.对比例1
58.一种立体密集库系统,采用如图1所示的常规大库位设计(最大化利用空间),每个巷道可达12~13板,仅横竖2个通道,库位为550个。
59.实施例1
60.一种立体密集库系统,包括存储物料用的贯通式立体库(其整体占地面积与对比例1相同,采用如图2所示的零散库位设计,库位为560个,每个库位可单独存放不同物料,库位100%可用)、如cn208516884 u所述的辅助升降装置和地牛式升降agv叉车;
61.辅助升降装置包括底座、升降机构和取/放货平台,升降机构固定设置于所述底座的一侧,取/放货平台与升降机构连接以在升降机构的带动下上下升降,取/放货平台包括货叉和与货叉连接的连接结构,在位于货叉的正下方的地面上设置有与货叉匹配的凹槽,以在货叉下降至最低位置时,货叉的上表面与地面的上表面齐平,货叉呈u形,如图2所示辅助升降装置1布置在贯通式立体库的进/出口;
62.地牛式升降agv叉车设有激光导航模块,地牛式升降agv叉车的两叉臂的间距及叉臂的宽度与川字地台板匹配,地牛式升降agv叉车的两叉臂外侧边之间的间距小于u形货叉两侧的最大间距。
63.上述立体密集库系统的作业方法,包括以下步骤:
64.(1)地牛式升降agv叉车叉取地面上的待作业货物,待作业货物下方布置有川字地台板,地牛式升降agv叉车的叉臂自川字地台板的插孔插入后地牛式升降agv叉车的叉臂升起,待作业货物与地面脱离接触;
65.(2)地牛式升降agv叉车将待作业货物运输至辅助升降装置处,将待作业货物放置在货叉上,此时川字地台板的插孔方向与货叉的开口方向垂直;
66.(3)辅助升降装置作业,货叉带动待作业货物升起一定高度,一定高度大于地牛式升降agv叉车叉臂最低状态下叉臂与地面的间距;
67.(4)地牛式升降agv叉车调整位置,自待作业货物下方撤出,地牛式升降agv叉车的
叉臂沿着货叉的开口方向进入待作业货物的下方,此时地台板位于地牛式升降agv叉车的叉臂的上方,待作业货物上下货叉的方向如图5所示;
68.(5)地牛式升降agv叉车的叉臂升起将待作业货物举升至指定高度;
69.(6)地牛式升降agv叉车将待作业货物运输至贯通式立体库中待作业货物的目标位置,地牛式升降agv叉车的叉臂下降直至川字地台板与货架支托接触即完成待作业货物的入库;
70.此外,可将地牛式升降agv叉车分为两组,一组负责将待作业货物自起始位置运输至辅助升降装置处,另一组负责将待作业货物自辅助升降装置处运输至贯通式立体库中待作业货物的目标位置,以进一步提高整体作业效率,当然也可采用同一台地牛式升降agv叉车完成上述入库工作,待作业货物的出库作业流程与上述入库作业流程基本相反。
71.实施例2
72.一种立体密集库系统,其与实施例1基本相同,不同在于,贯通式立体库采用如图3所示的零散库位及批量库位组合设计,库位为720个,库位利用率≥98%。
73.实施例3
74.一种立体密集库系统,其与实施例1基本相同,不同在于,贯通式立体库采用如图4所示的零散库位及批量库位组合设计,库位为840个,库位利用率≥95%。
75.实施例4
76.一种立体密集库系统,其与实施例1基本相同,不同在于,采用叉齿式平衡重叉车替换原用于将入库的待作业货物从起始位置运输至辅助升降装置或将出库的待作业货物从辅助升降装置运输至目标位置的地牛式升降agv叉车,其适用于的地台板为田字地台板;
77.上述立体密集库系统的作业方法,包括以下步骤:
78.(1)叉齿式平衡重叉车叉取地面上的待作业货物,待作业货物下方布置有田字地台板,叉齿式平衡重叉车的叉齿自田字地台板的插孔插入后叉齿升起,待作业货物与地面脱离接触;
79.(2)叉齿式平衡重叉车将待作业货物运输至辅助升降装置处,将待作业货物放置在货叉上;
80.(3)辅助升降装置作业,货叉带动待作业货物升起一定高度,一定高度大于地牛式升降agv叉车叉臂最低状态下叉臂与地面的间距;
81.(4)叉齿式平衡重叉车自待作业货物下方撤出,地牛式升降agv叉车的叉臂沿着货叉的开口方向进入待作业货物的下方,此时地台板位于地牛式升降agv叉车的叉臂的上方;
82.(5)地牛式升降agv叉车的叉臂升起将待作业货物举升至指定高度;
83.(6)地牛式升降agv叉车将待作业货物运输至贯通式立体库中待作业货物的目标位置,地牛式升降agv叉车的叉臂下降直至田字地台板与货架支托接触即完成待作业货物的入库。
84.实施例5
85.一种立体密集库系统,其与实施例4基本相同,不同在于,贯通式立体库采用如图3所示的零散库位及批量库位组合设计,库位为720个,库位利用率≥98%。
86.实施例6
87.一种立体密集库系统,其与实施例4基本相同,不同在于,贯通式立体库采用如图4
所示的零散库位及批量库位组合设计,库位为840个,库位利用率≥95%。
88.本领域技术人员应该理解,本领域技术人员在结合现有技术以及上述实施例可以实现变化例,在此不做赘述。这样的变化例并不影响本发明的实质内容,在此不予赘述。
89.以上对本发明的较佳实施例进行了描述。需要理解的是,本发明并不局限于上述特定实施方式,其中未尽详细描述的设备和结构应该理解为用本领域中的普通方式予以实施;任何熟悉本领域的技术人员,在不脱离本发明技术方案范围情况下,都可利用上述揭示的方法和技术内容对本发明技术方案做出许多可能的变动和修饰,或修改为等同变化的等效实施例,这并不影响本发明的实质内容。因此,凡是未脱离本发明技术方案的内容,依据本发明的技术实质对以上实施例所做的任何简单修改、等同变化及修饰,均仍属于本发明技术方案保护的范围内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1