一种工业自动化制造用智能导向桁架的制作方法
1.本发明涉及工业自动化制造技术领域,具体为一种工业自动化制造用智能导向桁架。
背景技术:
2.桁架:一种由杆件彼此在两端用铰链连接而成的结构。桁架由直杆组成的一般具有三角形单元的平面或空间结构,桁架杆件主要承受轴向拉力或压力,从而能充分利用材料的强度,在跨度较大时可比实腹梁节省材料,减轻自重和增大刚度。桁架的优点是杆件主要承受拉力或压力,可以充分发挥材料的作用,节约材料,减轻结构重量。常用的有钢桁架、钢筋混凝土桁架、预应力混凝土桁架、木桁架、钢与木组合桁架、钢与混凝土组合桁架。
3.目前使用的智能导向桁架,在对物料进行上料时,无法精准定位到物料所在位置,致使导向桁架结构中的机械手在抓取物料时,物料并不处于机械手正中心,物料运输有掉落的风险。
技术实现要素:
4.本发明旨在解决现有技术或相关技术中存在的技术问题之一。
5.为此,本发明所采用的技术方案为:
6.一种工业自动化制造用智能导向桁架,包括桁架模块、定位模块、上料模块和平移模块,所述桁架模块包括与所述桁架模块连接的两个横板、滑动连接于两个所述横板之间的滑板、与所述横板底部连接的两个竖板和位于两个所述横板之间的桌体,所述定位模块包括与所述滑板连接的矩形台、与所述矩形台顶部连接的气缸、活动连接于所述矩形台和气缸之间的转板、与所述转板顶部连接的电机、与所述电机输出轴连接的第一齿轮、活动安装于所述矩形台顶部的笼体、活动贯穿于所述矩形台并且与所述笼体连接的往复丝杆、与所述往复丝杆活动连接的轴承座、连接于所述矩形台和轴承座之间的两个伸缩杆、滑动套接于所述轴承座外侧的两个量板、连接于所述伸缩杆和量板之间的弹簧、位于所述往复丝杆底部并连接于两个所述量板之间的双轴电动推杆、连接于两个所述量板之间的绳体和活动套接于所述绳体外侧的金属环,所述电机、往复丝杆和双轴电动推杆与外接plc电性连接,所述上料模块包括与所述滑板顶部连接的撑架、与所述撑架连接的两个导杆、滑动套接于两个所述导杆外侧的滑板、连接于所述撑架和滑板之间的液压缸、与所述滑板底端连接的吸盘和与所述吸盘连接的摄像头,所述滑板上开设有适于滑板滑动的滑槽,所述液压缸和摄像头与外接plc电性连接,所述平移模块包括活动安装于所述滑板顶部的两个链轮、连接于两个所述链轮之间的链条、与所述链轮连接的两个第二齿轮,所述横板外侧开设有与第二齿轮啮合的齿槽。
7.通过采用上述技术方案,外接plc控制气缸活动端延伸,然后转板通过电机带动第一齿轮转动,第一齿轮与笼体啮合后,笼体带着往复丝杆转动,机械传动下,被伸缩杆限位的轴承座向下运动,量板跟随下降,然后启动双轴电动推杆,双轴电动推杆促使两个量板靠
近并且将物料夹紧,然后绳体变松,金属环自动滑落到绳体的中心位置,可准确定位到物料的中心位置,为稳定运输物料给予保证。
8.本发明在一较佳示例中可以进一步配置为:所述撑架底部安装有两个t形盘,两个所述t形盘分别与两个链轮竖向同轴,所述t形盘底部与链条顶部摩擦。
9.通过采用上述技术方案,t形盘起到限位链条的作用,降低链条与链轮分离的概率。
10.本发明在一较佳示例中可以进一步配置为:所述滑板位于多个竖板之间,多个所述竖板等间距、呈矩阵排列。
11.通过采用上述技术方案,采用该布局设计,竖板可以牢牢的将横板架起,降低横板倾倒的概率。
12.本发明在一较佳示例中可以进一步配置为:两个所述伸缩杆分别位于往复丝杆前后两侧,所述量板位于往复丝杆和伸缩杆之间。
13.通过采用上述技术方案,伸缩杆起到导向轴承座的作用,使轴承座平稳升降。
14.本发明在一较佳示例中可以进一步配置为:所述绳体位于双轴电动推杆一侧,所述绳体的直径小于金属环的内径。
15.通过采用上述技术方案,采用该尺寸设计,金属环可以灵活的在绳体上运动,方便金属环快速找到物料的中心,为吸盘抓紧物料提供保障。
16.本发明在一较佳示例中可以进一步配置为:两个所述导杆竖向同轴,所述导杆的长度与滑槽的长度相等。
17.通过采用上述技术方案,导杆一方面可以对滑板进行支撑,另一方面,使滑板运动更加顺畅。
18.本发明在一较佳示例中可以进一步配置为:所述滑板前后两侧均开设有矩形开口,两个所述第二齿轮分别活动安装于两个矩形开口内部。
19.通过采用上述技术方案,矩形开口为第二齿轮提供安装的空间,确保第二齿轮能够正常转动。
20.本发明在一较佳示例中可以进一步配置为:所述竖板底部安装有加固脚架,所述加固脚架由金属材料制成。
21.通过采用上述技术方案,通过加固脚架,可以提高竖板与地面的接触面积,使竖板结构更加牢固。
22.通过采用上述技术方案,本发明所取得的有益效果为:
23.1.本发明中,外接plc控制气缸活动端延伸,然后转板通过电机带动第一齿轮转动,第一齿轮与笼体啮合后,笼体带着往复丝杆转动,机械传动下,被伸缩杆限位的轴承座向下运动,量板跟随下降,然后启动双轴电动推杆,双轴电动推杆促使两个量板靠近并且将物料夹紧,然后绳体变松,金属环自动滑落到绳体的中心位置,可准确定位到物料的中心位置,为稳定运输物料给予保证。
24.2.本发明中,摄像头实时记录金属环的运动状态,然后将拍摄数据传递给外接plc,然后外接plc控制液压缸工作,液压缸带着滑板平移,然后滑板带着吸盘移动,直至吸盘与金属环平行后,关闭液压缸,降低了物料运输时掉落的概率。
25.3.本发明中,外接plc控制气缸活动端收缩,然后转板带着电机和第一齿轮转动,
第一齿轮与链条啮合,机械传动下,链条间接带动与链轮连接的第二齿轮转动,然后第二齿轮与齿槽配合,实现滑板的滑动,直至滑板和矩形台运动至桌体顶部后,结构简单,使用方便。
附图说明
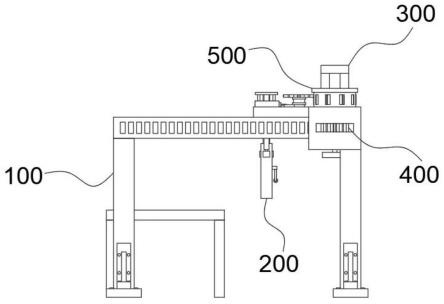
26.图1为本发明整体结构正视图;
27.图2为本发明整体结构立体图;
28.图3为本发明桁架模块示意图;
29.图4为本发明定位模块整体结构示意图;
30.图5为本发明定位模块局部结构示意图;
31.图6为本发明图5的a部结构放大图;
32.图7为本发明上料模块示意图;
33.图8为本发明平移模块示意图;
34.图9为本发明链轮和第二齿轮的连接关系示意图。
35.附图标记:
36.100、桁架模块;110、横板;120、滑板;130、竖板;140、桌体;
37.200、定位模块;210、矩形台;220、气缸;230、转板;240、电机;250、第一齿轮;260、笼体;270、往复丝杆;280、轴承座;290、伸缩杆;291、量板;292、弹簧;293、双轴电动推杆;294、绳体;295、金属环;
38.300、上料模块;310、撑架;320、导杆;330、滑板;340、液压缸;350、吸盘;360、摄像头;
39.400、平移模块;410、链轮;420、链条;430、第二齿轮;
40.500、t形盘。
具体实施方式
41.为使本发明的目的、技术方案和优点更加清楚明了,下面结合具体实施方式并参照附图,对本发明进一步详细说明。需要说明的是,在不冲突的情况下,本发明的实施例及实施例中的特征可以相互组合。
42.该理解,这些描述只是示例性的,而并非要限制本发明的范围。
43.下面结合附图描述本发明的一些实施例提供的一种工业自动化制造用智能导向桁架。
44.实施例一:
45.结合图1-8所示,本发明提供的一种工业自动化制造用智能导向桁架,包括桁架模块100、定位模块200、上料模块300和平移模块400,所述桁架模块100包括与所述桁架模块100连接的两个横板110、滑动连接于两个所述横板110之间的滑板120、与所述横板110底部连接的两个竖板130和位于两个所述横板110之间的桌体140;
46.所述定位模块200包括与所述滑板120连接的矩形台210、与所述矩形台210顶部连接的气缸220、活动连接于所述矩形台210和气缸220之间的转板230、与所述转板230顶部连接的电机240、与所述电机240输出轴连接的第一齿轮250、活动安装于所述矩形台210顶部
的笼体260、活动贯穿于所述矩形台210并且与所述笼体260连接的往复丝杆270、与所述往复丝杆270活动连接的轴承座280、连接于所述矩形台210和轴承座280之间的两个伸缩杆290、滑动套接于所述轴承座280外侧的两个量板291、连接于所述伸缩杆290和量板291之间的弹簧292、位于所述往复丝杆270底部并连接于两个所述量板291之间的双轴明
47.电动推杆293、连接于两个所述量板291之间的绳体294和活动套接于所述绳体294外侧的金属环295,所述电机240、往复丝杆270和双轴电动推杆293与外接plc电性连接;
48.所述上料模块300包括与所述滑板120顶部连接的撑架310、与所述撑架310连接的两个导杆320、滑动套接于两个所述导杆320外侧的滑板330、连接于所述撑架310和滑板330之间的液压缸340、与所述滑板330底端连接的吸盘350和与所述吸盘350连接的摄像头360,所述滑板120上开设有适于滑板330滑动的滑槽,所述液压缸340和摄像头360与外接plc电性连接;
49.所述平移模块400包括活动安装于所述滑板120顶部的两个链轮410、连接于两个所述链轮410之间的链条420、与所述链轮410连接的两个第二齿轮430,所述横板110外侧开设有与第二齿轮430啮合的齿槽。
50.进一步的,所述滑板120位于多个竖板130之间,多个所述竖板130等间距、呈矩阵排列,采用该布局设计,竖板130可以牢牢的将横板110架起,降低横板110倾倒的概率。
51.进一步的,两个所述伸缩杆290分别位于往复丝杆270前后两侧,所述量板291位于往复丝杆270和伸缩杆290之间,伸缩杆290起到导向轴承座280的作用,使轴承座280平稳升降。
52.进一步的,所述绳体294位于双轴电动推杆293一侧,所述绳体294的直径小于金属环295的内径,采用该尺寸设计,金属环295可以灵活的在绳体294上运动,方便金属环295快速找到物料的中心,为吸盘350抓紧物料提供保障。
53.进一步的,两个所述导杆320竖向同轴,所述导杆320的长度与滑槽的长度相等,导杆320一方面可以对滑板330进行支撑,另一方面,使滑板330运动更加顺畅。
54.进一步的,所述滑板120前后两侧均开设有矩形开口,两个所述第二齿轮430分别活动安装于两个矩形开口内部,矩形开口为第二齿轮430提供安装的空间,确保第二齿轮430能够正常转动。
55.实施例二:
56.结合图1所示,在实施例一的基础上,所述撑架310底部安装有两个t形盘500,两个所述t形盘500分别与两个链轮410竖向同轴,所述t形盘500底部与链条420顶部摩擦,t形盘500起到限位链条420的作用,降低链条420与链轮410分离的概率。
57.实施例三:
58.结合图1所示,在上述实施例中,所述竖板130底部安装有加固脚架,所述加固脚架由金属材料制成,通过加固脚架,可以提高竖板130与地面的接触面积,使竖板130结构更加牢固。
59.本发明的工作原理及使用流程:当本发明投入实际使用时,在桌体140上置放待生产的物料,然后通过外接plc控制气缸220活动端收缩,然后转板230带着电机240和第一齿轮250转动,第一齿轮250与链条420啮合,机械传动下,链条420间接带动与链轮410连接的第二齿轮430转动,然后第二齿轮430与齿槽配合,实现滑板120的滑动,直至滑板120和矩形
台210运动至桌体140顶部后,再通过外接plc控制气缸220活动端延伸,然后转板230通过电机240带动第一齿轮250转动,第一齿轮250与笼体260啮合,然后笼体260带着往复丝杆270转动,机械传动下,被伸缩杆290限位的轴承座280向下运动,然后量板291跟随下降,然后启动双轴电动推杆293,双轴电动推杆293促使两个量板291靠近,然后绳体294变松,金属环295自动滑落到绳体294的中心位置,然后关闭双轴电动推杆293,这期间,摄像头360实时记录金属环295的运动状态,并且将拍摄数据传递给外接plc,然后外接plc控制液压缸340工作,液压缸340带着滑板330平移,然后滑板330带着吸盘350移动,直至吸盘350与金属环295平行后,关闭液压缸340,降低了物料运输时掉落的概率。
60.尽管已经示出和描述了本发明的实施例,本领域的普通技术人员可以理解,在不脱离本发明的原理和宗旨的情况下可以对这些实施例进行多种变化、修改、替换和变型,本发明的范围由权利要求及其等同物限定。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1