爬升机构、曳引机安装系统及爬升机构的控制方法与流程
1.本发明属于吊装设备技术领域,具体涉及一种爬升机构、曳引机安装系统及爬升机构的控制方法。
背景技术:
2.曳引机是电梯的核心驱动部件,被称为电梯的“心脏”,其安全性和可靠性会直接影响电梯的安全性和可靠性。随着市场竞争越来越激烈,无机房薄型机因有效降低建筑成本,因此使用越来越广泛。受限于井道的安装空间,现有的无机房永磁同步曳引机在工程安装时,均通过将曳引机运输到建筑顶层厅门处,并使用手工葫芦将曳引机拉举到曳引机安装位置,但在建筑楼层较低时,会出现曳引机安装位置到吊装点的空间较小导致不能容放葫芦、葫芦吊钩、吊环螺钉等,难以把曳引机安全并顺畅吊装到曳引机安装位置上。
技术实现要素:
3.本发明的目的在于提供一种爬升机构,该爬升机构能够在建筑楼层较低时将曳引机安全并顺畅吊装到曳引安装位置上。
4.实现上述目的包括如下技术方案。
5.一种爬升机构,所述爬升机构包括第一抱紧装置、第二抱紧装置和摆动装置;所述第一抱紧装置、第二抱紧装置均与所述摆动装置活动连接;
6.所述第一抱紧装置、第二抱紧装置均包括固定件以及与所述固定件活动连接的抱夹件,所述固定件相对所述抱夹件正向活动或逆向活动时,所述抱夹件呈松开状态或抱紧状态;
7.所述摆动装置朝所述第一抱紧装置摆动时,带动所述第一抱紧装置的固定件相对抱夹件正向运动,同步带动所述第二抱紧装置的固定件相对抱夹件逆向运动,所述第一抱紧装置朝远离所述第二抱紧装置的方向运动;所述摆动装置朝所述第二抱紧装置摆动时,带动所述第一抱紧装置的固定件相对抱夹件逆向运动,同步带动所述第二抱紧装置的固定件相对抱夹件正向运动,所述第二抱紧装置朝靠近所述第一抱紧装置的方向运动。
8.在其中一些实施例中,所述固定件具有容腔,所述抱夹件活动设置于所述容腔内,所述抱夹件的外壁与所述固定件的内壁的接触位置为斜面配合,所述固定件相对所述抱夹件活动至与所述抱夹件斜面分离时,所述抱夹件呈松开状态,所述固定件相对所述抱夹件活动至与所述抱夹件斜面相抵时,所述抱夹件呈抱紧状态。
9.在其中一些实施例中,所述抱夹件包括均设置于所述容腔内的第一夹部和第二夹部,所述第一夹部和所述第二夹部相对设置并配合形成有抱夹腔,所述第一夹部和所述第二夹部各自与所述固定件的内壁的接触位置为斜面配合。
10.在其中一些实施例中,所述抱夹件还包括连接轴,所述第一夹部开设有第一插接孔,所述第二夹部开设有第二插接孔,所述连接轴的相对两端活动插接于所述第一插接孔和所述第二插接孔。
11.在其中一些实施例中,所述固定件包括底板和侧围板,所述侧围板竖向设置于所述底板上,且所述侧围板与所述底板围合形成具有顶端开口的容腔,所述底板开设有与所述开口连通的通孔,所述开口、抱夹腔与所述通孔同轴并连通设置,所述侧围板的内壁向所述通孔至所述开口的轴线方向倾斜设置,且所述容腔底端的径向面积大于所述容腔顶端的径向面积。
12.在其中一些实施例中,所述固定件的内底壁与抱夹件之间设置有弹性件。
13.在其中一些实施例中,所述第一夹部和所述第二夹部相对的一侧均设置有防滑层。
14.在其中一些实施例中,所述摆动装置包括第一铰轴、第二铰轴和摆动杆,所述第一铰轴与所述第二抱紧装置的固定件铰接,所述第二铰轴相对两端分别与所述第一抱紧装置的固定件、第一铰轴铰接,所述摆动杆与所述第一铰轴固定连接。
15.一种曳引机安装系统,所述曳引机安装系统包括两个吊带以及两个如上所述的爬升机构,两个所述吊带平行吊装于外部设备,每一个所述吊带对应设置有一个所述爬升机构,所述爬升机构的所述第一抱紧装置的抱夹件、第二抱紧装置的抱夹件顺次抱夹于所述吊带,且所述第一抱紧装置位于所述第二抱紧装置的上方。
16.一种爬升机构的控制方法,基于如上所述的爬升机构;
17.将所述第一抱紧装置的抱夹件、第二抱紧装置的抱夹件顺次与待抱夹物抱夹设置,且所述第一抱紧装置位于所述第二抱紧装置的上方;
18.控制所述摆动装置朝所述第一抱紧装置摆动,所述摆动装置带动所述第一抱紧装置的固定件相对抱夹件正向运动,同步带动所述第二抱紧装置的固定件相对抱夹件逆向运动,所述第一抱紧装置朝远离所述第二抱紧装置的方向运动;
19.控制所述摆动装置朝所述第二抱紧装置摆动,所述摆动装置带动所述第一抱紧装置的固定件相对抱夹件逆向运动,同步带动所述第二抱紧装置的固定件相对抱夹件正向运动,所述第二抱紧装置朝靠近所述第一抱紧装置的方向运动;
20.所述摆动装置循环摆动带动所述爬升机构沿待抱夹物进行爬升。
21.本发明所提供的技术方案具有以下的优点及效果:
22.该爬升机构通过设置第一抱紧装置、第二抱紧装置和摆动装置相互配合,通过摆动装置朝第一抱紧装置、第二抱紧装置循环摆动,以带动第一抱紧装置的抱夹件和第二抱紧装置的抱夹件松开或者抱紧,应用于将曳引机吊装至曳引机安装位置时,能够使第一抱紧装置、第二抱紧装置间歇性沿吊带爬升,从而带动曳引机最终吊装至曳引机安装位置,能够适用于在建筑楼层较低,曳引机安装位置到吊装点的空间较小时,将曳引机安全并顺畅吊装到曳引机安装位置上。
附图说明
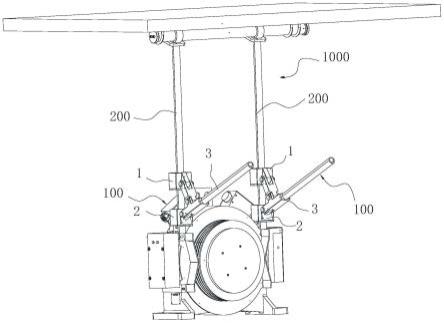
23.图1是本发明实施例的曳引机安装系统的结构示意图;
24.图2是图1的爬升机构的结构示意图;
25.图3是图2的爬升机构的第一抱紧装置的结构示意图;
26.图4是图2的爬升机构的第二抱紧装置的结构示意图;
27.图5是图2的爬升机构处于初始状态的结构示意图;
28.图6是图2的爬升机构处于摆动装置朝第一抱紧装置摆动的其一运动状态图;
29.图7是图2的爬升机构处于摆动装置朝第一抱紧装置摆动的其二运动状态图;
30.图8是图2的爬升机构处于摆动装置朝第二抱紧装置摆动的运动状态图;
31.附图标记说明:
32.1000、曳引机安装系统;
33.100、爬升机构;
34.1、第一抱紧装置;11、固定件;111、容腔;112、底板;113、侧围板;114、开口;115、通孔;12、抱夹件;121、第一夹部;122、第二夹部;123、连接轴;13、弹性件;2、第二抱紧装置;3、摆动装置;31、第一铰轴;32、第二铰轴;33、摆动杆;34、固定柱。
35.200、吊带。
具体实施方式
36.为了便于理解本发明,下面将参照说明书附图对本发明的具体实施例进行更详细的描述。
37.除非特别说明或另有定义,本文所使用的“第一、第二
…”
仅仅是用于对名称的区分,不代表具体的数量或顺序。
38.除非特别说明或另有定义,本文所使用的术语“和/或”包括一个或多个相关的所列项目的任意的和所有的组合。
39.需要说明的是,本文中“固定于”、“连接于”,可以是直接固定或连接于一个元件,也可以是间接固定或连接于一个元件。
40.需要说明的是,该爬升机构100主要用于曳引机吊装工程中,通过该爬升机构100带动曳引机吊装到安装位置上,进一步地,该爬升机构100能够用于安装位置到吊装点的空间不大于500mm时的狭窄空间中的曳引机吊装。当然,在其他实施例中,该爬升机构100也可以用于对其他待吊装设备吊装至预设位置,在此不作特别的限制。为了便于理解,以下均以该爬升机构100吊装曳引机的应用进行描述。
41.本发明提供一种爬升机构100,如图1至图8所示,该爬升机构100包括第一抱紧装置1、第二抱紧装置2和摆动装置3;第一抱紧装置1、第二抱紧装置2均与摆动装置3活动连接。第一抱紧装置1、第二抱紧装置2均包括固定件11以及与固定件11活动连接的抱夹件12,固定件11相对抱夹件12正向活动或逆向活动时,抱夹件12呈松开状态或抱紧状态,需要说明的是,该固定件11相对抱夹件12正向活动或逆向活动是指相对运动,例如设定固定件11相对抱夹件12的正向活动为向上运动,其固定件11相对抱夹件12的逆向活动为向下运动,例如设定固定件11相对抱夹件12的正向活动为向前运动,其固定件11相对抱夹件12的逆向活动为向后运动。其中,该爬升机构100用于曳引机吊装时,曳引机安装位置处设置有安装横梁,安装横梁处安装有吊带200。具体地,该抱夹件12用于抱紧或松开待抱夹物,具体在本实施例中,该抱夹件12用于抱紧或松开吊带200,固定件11相对抱夹件12正向活动时,该抱夹件12呈松开状态并松开吊带200,固定件11相对抱夹件12逆向活动时,该抱夹件12呈抱紧状态并抱紧吊带200。
42.摆动装置3朝第一抱紧装置1摆动时,带动第一抱紧装置1的固定件11相对抱夹件12正向运动,同步带动第二抱紧装置2的固定件11相对抱夹件12逆向运动,第一抱紧装置1
朝远离第二抱紧装置2的方向运动;摆动装置3朝第二抱紧装置2摆动时,带动第一抱紧装置1的固定件11相对抱夹件12逆向运动,同步带动第二抱紧装置2的固定件11相对抱夹件12正向运动,第二抱紧装置2朝靠近第一抱紧装置1的方向运动。
43.可以理解地,该爬升机构100用于吊装曳引机至曳引机安装位置的工作原理大致如下:
44.当需要将曳引机吊装至曳引机安装位置时,将该第一抱紧装置1的抱夹件12、第二抱紧装置2的抱夹件12顺次抱夹于吊带200,且第一抱紧装置1位于第二抱紧装置2的上方,第二抱紧装置2与曳引机连接,通过外力控制摆动装置3朝第一抱紧装置1摆动,摆动装置3带动第一抱紧装置1的固定件11相对抱夹件12正向运动,同步带动第二抱紧装置2的固定件11相对抱夹件12逆向运动,此时第一抱紧装置1的抱夹件12松开吊带200,第二抱紧装置2的抱夹件12抱紧吊带200,松开状态的第一抱紧装置1此时在摆动装置3的带动下顺势朝远离第二抱紧装置2的方向运动,因此第一抱紧装置1沿吊带200爬升至预设距离;摆动装置3朝第二抱紧装置2摆动时,带动第一抱紧装置1的固定件11相对抱夹件12逆向运动,同步带动第二抱紧装置2的固定件11相对抱夹件12正向运动,此时第一抱紧装置1的抱夹件12抱紧吊带200,第二抱紧装置2的抱夹件12松开吊带200,松开状态的第二抱紧装置2此时在摆动装置3的带动下顺势朝靠近第一抱紧装置1的方向运动,此时拉动吊带200,第二抱紧装置2顺势沿吊带200爬升至预设距离,循环摆动该摆动装置3,以使第一抱紧装置1、第二抱紧装置2间歇性沿吊带200爬升,从而带动曳引机最终吊装至曳引机安装位置。
45.综上,该爬升机构100通过设置第一抱紧装置1、第二抱紧装置2和摆动装置3相互配合,通过摆动装置3朝第一抱紧装置1、第二抱紧装置2循环摆动,以带动第一抱紧装置1的抱夹件12和第二抱紧装置2的抱夹件12松开或者抱紧,应用于将曳引机吊装至曳引机安装位置时,能够使第一抱紧装置1、第二抱紧装置2间歇性沿吊带200爬升,从而带动曳引机最终吊装至曳引机安装位置,能够适用于在建筑楼层较低,曳引机安装位置到吊装点的空间较小时,将曳引机安全并顺畅吊装到曳引机安装位置上。
46.在一些实施例中,如图1和图2所示,固定件11具有容腔111,抱夹件12活动设置于容腔111内,抱夹件12的外壁与固定件11的内壁的接触位置为斜面配合,固定件11相对抱夹件12活动至与抱夹件12斜面分离时,抱夹件12呈松开状态,固定件11相对抱夹件12活动至与抱夹件12斜面相抵时,抱夹件12呈抱紧状态。可以理解地,通过推动固定件11相对抱夹件12之间斜面移动,当推动固定件11相对抱夹件12活动至与抱夹件12斜面松开时,固定件11的腔壁和抱夹件12之间存在间隙,固定件11解除对抱夹件12的限制,抱夹件12呈松开状态,此时抱夹件12能够松开吊带200。当推动固定件11相对抱夹件12活动至与抱夹件12斜面相抵时,固定件11压紧抱夹件12,抱夹件12呈抱紧状态,此时抱夹件12能够抱紧吊带200。故此,通过斜面配合控制抱夹件12的抱紧或松开,具有结构简单,操作方便的特点。
47.在一些实施例中,如图2至图4所示,抱夹件12包括均设置于容腔111内的第一夹部121和第二夹部122,第一夹部121和第二夹部122相对设置并配合形成有用于抱紧吊带200的抱夹腔,第一夹部121和第二夹部122各自与固定件11的内壁的接触位置为斜面配合。可以理解地,通过第一夹部121和第二夹部122相对设置于容腔111内,两个夹部之间通过斜面配合相互靠近或者远离,以形成抱紧状态或松开状态,以能够对吊带200稳固抱紧或者快速松开。其中,摆动装置3带动第一抱紧装置1的固定件11相对抱夹件12正向运动至与抱夹件
12斜面松开时,同步带动第二抱紧装置2的固定件11相对抱夹件12逆向运动至与抱夹件12斜面相抵时,此时第一抱紧装置1的两个夹部松开吊带200,第二抱紧装置2的两个夹部抱紧吊带200;摆动装置3朝第二抱紧装置2摆动时,带动第一抱紧装置1的固定件11相对抱夹件12逆向运动至与抱夹件12斜面相抵,同步带动第二抱紧装置2的固定件11相对抱夹件12正向运动至与抱夹件12斜面松开时,此时第一抱紧装置1的抱夹件12抱紧吊带200,第二抱紧装置2的抱夹件12松开吊带200。
48.在一些实施例中,如图3和图4所示,抱夹件12还包括连接轴123,第一夹部121开设有第一插接孔,第二夹部122开设有第二插接孔,连接轴123的相对两端活动插接于第一插接孔和第二插接孔。可以理解地,第一夹部121和第二夹部122通过该连接轴123活动连接,以使第一夹部121和第二夹部122在该连接轴123的作用下保证上下运动时水平位置一致,且连接轴123的活动插接方式能够避免阻碍第一夹部121和第一夹部121的相互靠近或者相互远离的动作,具有调节灵活的特点。
49.在一些实施例中,如图3和图4所示,固定件11包括底板112和侧围板113,侧围板113竖向设置于底板112上,且侧围板113与底板112围合形成具有顶端开口114的容腔111,底板112开设有与开口114连通的通孔115,开口114、抱夹腔与通孔115同轴并连通设置,侧围板113的内壁向通孔115至开口114的轴线方向倾斜设置,且容腔111底端的径向面积大于容腔111顶端的径向面积。可以理解地,该容腔111形成上小下大的结构,以使该固定件11内部呈倾斜面结构,该第一夹部121和第二夹部122配合该容腔111的结构形成上小下大的类似直角梯形体结构,以使第一夹部121、第二夹部122与侧围板113的内壁之间斜面配合,且第一夹部121和第二夹部122配合形成的抱夹腔为类似直筒腔结构,以能够适应吊带200的结构。
50.在一些实施例中,如图3和图4所示,固定件11的内底壁与抱夹件12之间设置有弹性件13;具体本实施例中,该固定件11的内底壁与第一夹部121、第二夹部122之间均设置有弹性件13。具体地,该弹性件13可以是弹簧,弹性件13能够对固定件11和抱夹件12的相对运动形成缓冲,以避免对固定件11和抱夹件12造成损伤。可以理解地,当抱夹件12的第一夹部121、第二夹部122向上运动时,受固定件11斜面限制,第一夹部121、第二夹部122之间距离变小,从而实现夹紧吊带200功能,当第一抱紧装置1或第二抱紧装置2有相对吊带200向下运动的趋势时,固定件11会驱动第一夹部121、第二夹部122施加更大的加紧力,确保第一抱紧装置1或第二抱紧装置2不会向下运动。当第一抱紧装置1或第二抱紧装置2有相对吊带200向上运动的趋势时,当吊带200与第一夹部121、第二夹部122之间的摩擦力大于弹性件13的正压力时,第一夹部121、第二夹部122相对向下移动,第一夹部121、第二夹部122距离变大,实现松开吊带200功能。
51.在一些实施例中,第一夹部121和第二夹部122相对的一侧均设置有防滑层。可以理解地,第一夹部121、第二夹部122与吊带200的接触面可以为网纹结构,以确保第一夹部121、第二夹部122夹紧吊带200时,有效避免第一夹部121、第二夹部122与吊带200之间产生相对滑动现象。
52.在一些实施例中,如图2所示,摆动装置3包括第一铰轴31、第二铰轴32和摆动杆33,第一铰轴31与第二抱紧装置2的固定件11铰接,第二铰轴32相对两端分别与第一抱紧装置1的固定件11、第一铰轴31铰接,摆动杆33与第一铰轴31固定连接。可以理解地,通过该第
一铰轴31、第二铰轴32和摆动杆33的联动配合,以能够通过外力作用于摆动杆33时带动第一铰轴31和第二铰轴32运动,以带动第一抱紧装置1、第二抱紧装置2状态改变,其中,如图5、图6和图7所示,当摆动杆33朝第一抱紧装置1摆动时,带动第一抱紧装置1的固定件11相对抱夹件12沿斜面向上运动,同步带动第二抱紧装置2的固定件11相对抱夹件12沿斜面向下运动,此时第一抱紧装置1的抱夹件12松开吊带200,第二抱紧装置2的抱夹件12抱紧吊带200,松开状态的第一抱紧装置1此时顺势朝上进行爬升运动,具体地,当第一抱紧装置1的固定件11、第二抱紧装置2的固定件11之间的吊带200距离小于第一抱紧装置1的固定件11和第二抱紧装置2的固定件11之间的距离时,爬升装置及曳引机自由状态下如图6所示;当第一抱紧装置1的固定件11、第二抱紧装置2的固定件11之间的吊带200距离大于第一抱紧装置1的固定件11和第二抱紧装置2的固定件11之间的距离时,爬升装置及曳引机自由状态下如图7所示;如图8所示,摆动杆33朝第二抱紧装置2摆动时,带动第一抱紧装置1的固定件11相对抱夹件12沿斜面向下运动,同步带动第二抱紧装置2的固定件11相对抱夹件12沿斜面向上运动,此时第一抱紧装置1的抱夹件12抱紧吊带200,第二抱紧装置2的抱夹件12松开吊带200,松开状态的第二抱紧装置2此时在摆动装置3的带动下顺势朝靠近第一抱紧装置1的方向进行爬升运动。
53.具体在本实施例中,如图2所示,该第一铰轴31上设置有突出于第一铰轴31的固定柱34,所述第二铰轴32与固定柱34铰接,以有效防止第二铰轴32在转动时与第一铰轴31形成结构干扰。
54.本发明提供一种曳引机安装系统1000,如图1至图8所示,该曳引机安装系统1000包括两个吊带200以及两个如上的爬升机构100,两个吊带200平行吊装于外部设备如安装横梁处,每一个吊带200对应设置有一个爬升机构100,爬升机构100的第一抱紧装置1的抱夹件12、第二抱紧装置2的抱夹件12顺次抱夹于吊带200,且第一抱紧装置1位于第二抱紧装置2的上方,第二抱紧装置2通过安装架对曳引机进行固定。可以理解地,通过两个爬升机构100共同对曳引机进行吊装操作,能够使曳引机平稳且顺畅吊装至曳引机安装位置。
55.综上,该曳引机安装系统1000通过设置爬升机构100与吊带200配合,其中通过摆动装置3朝第一抱紧装置1、第二抱紧装置2循环摆动,以带动第一抱紧装置1的抱夹件12和第二抱紧装置2的抱夹件12松开或者抱紧,能够使第一抱紧装置1、第二抱紧装置2间歇性沿吊带200爬升,从而带动曳引机最终吊装至曳引机安装位置,能够适用于在建筑楼层较低,曳引机安装位置到吊装点的空间较小时,将曳引机安全并顺畅吊装到曳引机安装位置上。
56.本发明还提供一种爬升机构100的控制方法,基于如上的爬升机构100;
57.将第一抱紧装置1的抱夹件12、第二抱紧装置2的抱夹件12顺次与待抱夹物抱夹设置,且第一抱紧装置1位于第二抱紧装置2的上方;
58.控制摆动装置3朝第一抱紧装置1摆动,摆动装置3带动第一抱紧装置1的固定件11相对抱夹件12正向运动,同步带动第二抱紧装置2的固定件11相对抱夹件12逆向运动,第一抱紧装置1朝远离第二抱紧装置2的方向运动;
59.控制摆动装置3朝第二抱紧装置2摆动,摆动装置3带动第一抱紧装置1的固定件11相对抱夹件12逆向运动,同步带动第二抱紧装置2的固定件11相对抱夹件12正向运动,第二抱紧装置2朝靠近第一抱紧装置1的方向运动;
60.摆动装置3循环摆动带动爬升机构100沿待抱夹物进行爬升。
61.上述,该爬升机构100的控制方法通过设置爬升机构100与吊带200配合,其中通过摆动装置3朝第一抱紧装置1、第二抱紧装置2循环摆动,以带动第一抱紧装置1的抱夹件12和第二抱紧装置2的抱夹件12松开或者抱紧,能够使第一抱紧装置1、第二抱紧装置2间歇性沿吊带200爬升,从而带动曳引机最终吊装至曳引机安装位置,能够适用于在建筑楼层较低,曳引机安装位置到吊装点的空间较小时,将曳引机安全并顺畅吊装到曳引机安装位置上。
62.以上实施例也并非是基于本发明的穷尽性列举,在此之外,还可以存在多个未列出的其他实施方式。在不违反本发明构思的基础上所作的任何替换与改进,均属本发明的保护范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1