一种垃圾分类机器人的带式垃圾分类装置的制作方法
1.本发明涉及垃圾分类机器人技术领域,更具体地说,涉及一种垃圾分类机器人的带式垃圾分类装置。
背景技术:
2.垃圾分类(garbage classification),一般是指按一定规定或标准将垃圾分类储存、投放和搬运,从而转变成公共资源的一系列活动的总称。
3.垃圾分类的目的是提高垃圾的资源价值和经济价值,减少垃圾处理量和处理设备的使用,降低处理成本,减少土地资源的消耗,具有社会、经济、生态等几方面的效益。
4.垃圾在分类储存阶段属于公众的私有品,垃圾经公众分类投放后成为公众所在小区或社区的区域性公共资源,垃圾分类搬运到垃圾集中点或转运站后成为没有排除性的公共资源。从国内外各城市对生活垃圾分类的方法来看,大多都是根据垃圾的成分、产生量,结合本地垃圾的资源利用和处理方式等来进行分类的。
5.现有技术公开号为cn111674776b的文献提供一种垃圾分类用智能机器人装置,通过智能语音模块的设置,可帮助人们更好的了解垃圾分类标准,同时利用智能语音模块,使垃圾桶在不使用时处于关闭状态,避免垃圾腐烂后散发恶臭,减少垃圾桶对外界环境的影响,使用者仅需发出声音的方式即可使垃圾桶开启,无需直接触碰垃圾桶,增加垃圾桶使用的卫生性;利用收集雨水存储在第三空腔内的方式,为垃圾桶提供散热效果,使垃圾桶底部堆积的热量更易散出,减缓垃圾腐烂速率,延长垃圾保质期,从而减小垃圾产生的气味,避免周边环境受到较大影响。但是,该装置依然存在下列问题:该装置设置了多个并排的垃圾桶进行分类,而在同一个小区内无法满足多点投放此垃圾桶,通常会在出口一点设置,从而导致了部分居民距离较远,无法进行垃圾的分类,同时,该装置通过居民口述进行垃圾的分类,容易出现错误分类的情况,导致分类垃圾桶内出现其他类垃圾的混合,达不到分类的目的,同时该装置设置普通,开口向上,从而导致会有雨水进入,使所有的垃圾被水浸泡的情况,导致腐烂发臭的。鉴于此,我们提出一种垃圾分类机器人的带式垃圾分类装置。
技术实现要素:
6.1.要解决的技术问题
7.本发明的目的在于提供一种垃圾分类机器人的带式垃圾分类装置,以解决上述背景技术中提出的问题。
8.2.技术方案
9.一种垃圾分类机器人的带式垃圾分类装置,包括分类移动块,分类移动块的顶部外壁均匀开设有多个放置腔,放置腔的一侧开设置有箱门,放置腔内部设置有垃圾分类收集机构;分类移动块的左右两侧均设置有定点移动机构;分类移动块前后两侧的中部对称设置有两个固定板,固定板上侧均设置有识别分类主体。
10.优选的,垃圾分类收集机构包括垃圾收集箱,圾收集箱的前侧上端开设有环形腔,
环形腔的前侧中间位置设置有固定环,固定环的后侧壁呈环形等间距开设有多个导槽,环形腔中转动设置有环形块,环形块设于固定环的后侧;环形腔内部呈环形等间距设置有多个扇形门,多个扇形门设置于固定环与环形齿条之间;环形块表面呈环形等间距开设有多个导向槽,导向槽呈弧度设置且呈倾斜结构设置;扇形门的弧周外壁中部设有连接限位块,连接限位块后侧设置有限位导柱,导槽与连接限位块滑动连接,导向槽与限位导柱滑动连接。
11.优选的,垃圾收集箱内部一侧开设有机腔b,机腔b前侧开设有圆腔,机腔b内部设置有第二电机,第二电机输出轴穿过机腔b内壁延伸至圆腔内部并套接有开闭齿轮,环形块圆周外壁设置有环形齿条,开闭齿轮圆周外壁穿过圆腔内壁延伸至环形腔内部并与环形齿条啮合连接。
12.优选的,环形腔后侧中部连通有管道,管道呈倾斜结构设置,管道与垃圾收集箱内部相连通,垃圾收集箱的前侧设置有出圾门。
13.优选的,定点移动机构包括两个转动运动盘,转动运动盘外壁靠近边缘处设置有偏心轴,偏心轴圆周外壁转动设置有弧形连杆,弧形连杆外端通过销轴转动连接有弧形壁阻腿。
14.优选的,弧形连杆中部通过销轴转动设置有限位杆,限位杆外端与分类移动块外壁开设的孔转动连接。
15.优选的,弧形壁阻腿内端通过销轴转动连接有平衡杆,平衡杆外端与分类移动块外壁开设的孔转动连接。
16.优选的,分类移动块的左右两侧内部对称开设有两个方腔,方腔的内侧开设有机腔a,机腔a内部设置有第一电机,转动运动盘的轴穿过分类移动块外壁延伸至方腔内部并套接有传动齿轮a,传动齿轮a圆周外壁啮合连接有传动齿轮b,传动齿轮b与第一电机同轴连接。
17.优选的,分类移动块的左右两侧均固设有防护壳,分类移动块的上侧中部固设有支撑板,支撑板上侧固设有防雨檐。
18.3.有益效果
19.相比于现有技术,本发明的优点在于:
20.1.本发明通过定点移动机构的设置,在使用时,该装置可以通过设定控制器进行至少两点的定点,使其在不同的时间段可以位于不同的位置,从而避免了在出口一点设置,导致部分居民距离较远,无法进行垃圾分类的情况,提高了人人分类的效果,而通过弧形壁阻腿的设置,使其避免了底面有阻挡物的情况。
21.2.本发明通过垃圾分类收集机构的设置,使其可以识别分类主体对垃圾进行识别,从而打开对应的垃圾收集箱进行放置,避免了通过居民口述进行识别垃圾分类,容易出现居民不认识而错误分类的情况,导致分类垃圾桶内出现其他类垃圾的混合,达不到分类的目的的情况。
22.3.本发明通过出圾门侧向的设置及防雨檐的设置,避免了有雨水进入,使所有的垃圾被水浸泡,导致腐烂发臭的情况;垃圾收集箱设于放置腔内部,管道呈倾斜结构设置,管道与垃圾收集箱内部相连通,通过管道呈倾斜结构的设置,使垃圾可以顺着管道顺利落入腔内,避免了堵塞的情况。
附图说明
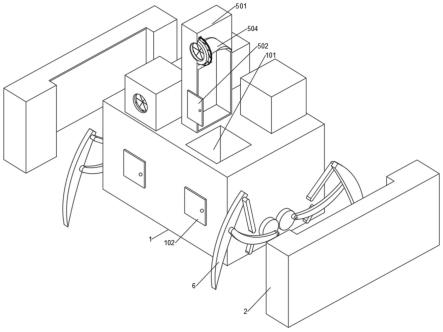
23.图1为本发明的整体结构示意图;
24.图2为本发明的整体结构展开图;
25.图3为本发明的定点移动机构结构拆分图;
26.图4为本发明的垃圾收集箱上侧结构展开图;
27.图5为本发明的环形块及其外部结构拆分图;
28.图中标号说明:1、分类移动块;101、放置腔;102、箱门;103、方腔;104、机腔a;105、第一电机;2、防护壳;3、支撑板;4、防雨檐;5、垃圾分类收集机构;501、垃圾收集箱;502、出圾门;503、环形腔;504、管道;505、固定环;506、导槽;507、环形块;508、环形齿条;509、导向槽;5010、扇形门;5011、连接限位块;5012、限位导柱;5013、机腔b;5014、圆腔;5015、第二电机;5016、开闭齿轮;6、定点移动机构;601、转动运动盘;602、偏心轴;603、弧形连杆;604、限位杆;605、弧形壁阻腿;606、平衡杆;607、传动齿轮a;608、传动齿轮b;7、固定板;8、识别分类主体。
具体实施方式
29.请参阅图1-5,本发明提供一种技术方案:
30.一种垃圾分类机器人的带式垃圾分类装置,包括分类移动块1,分类移动块1的左右两侧均固设有防护壳2,分类移动块1上侧中部固设有支撑板3,支撑板3上侧固设有防雨檐4;分类移动块1的顶部外壁均匀开设有多个放置腔101,放置腔101的一侧开设置有箱门102,放置腔101内部设置有垃圾分类收集机构5;分类移动块1的左右两侧均设置有定点移动机构6;分类移动块1前后两侧的中部对称设置有两个固定板7,固定板7上侧设置有识别分类主体8。
31.本发明通过定点移动机构6的设置,在使用时,该装置可以通过设定控制器进行至少两点的定点,使其在不同的时间段可以位于不同的位置,从而避免了在出口一点设置,导致部分居民距离较远,无法进行垃圾分类的情况,提高了人人分类的效果。
32.具体的,垃圾分类收集机构5包括垃圾收集箱501,圾收集箱501的前侧上端开设有环形腔503,环形腔503后侧中部连通有管道504,环形腔503前侧中间位置设置有固定环505,固定环505的后侧壁呈环形等间距开设有多个导槽506,环形腔503中转动设置有环形块507,环形块507设于固定环505的后侧,环形块507圆周外壁设置有环形齿条508;环形腔503内部呈环形等间距设置有多个扇形门5010,多个扇形门5010设置于固定环505与环形齿条508之间;环形块507表面呈环形等间距开设有多个导向槽509,导向槽509呈弧度设置且呈倾斜结构设置;扇形门5010的弧周外壁中部设有连接限位块5011,连接限位块5011后侧设置有限位导柱5012,导槽506与连接限位块5011滑动连接,导向槽509与限位导柱5012滑动连接。
33.垃圾收集箱501内部一侧开设有机腔b5013,机腔b5013前侧开设有圆腔5014,机腔b5013内部设置有第二电机5015,第二电机5015输出轴穿过机腔b5013内壁延伸至圆腔5014内部并套接有开闭齿轮5016,开闭齿轮5016圆周外壁穿过圆腔5014内壁延伸至环形腔503内部并与环形齿条508啮合连接。
34.本发明通过导槽506与连接限位块5011滑动连接,从而使得扇形门5011可以进行
内外的直线运动进行开合。
35.本发明通过环形齿条508转动,使得环形块507上的导向槽509改变位置,而导向槽509呈弧度设置且呈倾斜结构设置,导向槽509与限位导柱5012滑动连接,从而使得连接限位块5011运动,从而带动了扇形门5010打开。
36.本发明通过第二电机5015输出轴转动,而第二电机5015输出轴穿过机腔b5013内壁延伸至圆腔5014内部并套接有开闭齿轮5016,从而使得开闭齿轮5016进行转动,而开闭齿轮5016圆周外壁穿过圆腔5014内壁延伸至环形腔503内部并与环形齿条508啮合连接,从而带动了环形齿条508转动。
37.本发明通过垃圾分类收集机构5的设置,使其可以识别分类主体8对垃圾进行识别,从而打开对应的垃圾收集箱501进行放置,避免了通过居民口述进行识别垃圾分类,容易出现居民不认识而错误分类的情况,导致分类垃圾桶内出现其他类垃圾的混合,达不到分类的目的的情况。
38.进一步的,管道504呈倾斜结构设置,管道504与垃圾收集箱501内部相连通,垃圾收集箱501的前侧设置有出圾门502。
39.本发明通过管道504呈倾斜结构的设置,使垃圾可以顺着管道504顺利落入腔内,避免了堵塞的情况。
40.分类移动块1的左右两侧内部对称开设有两个方腔103,方腔103的内侧开设有机腔a104,机腔a104内部设置有第一电机105。
41.值得注意的是,定点移动机构6包括两个转动运动盘601,转动运动盘601外壁靠近边缘处设置有偏心轴602,偏心轴602圆周外壁转动设置有弧形连杆603,弧形连杆603外端通过销轴转动连接有弧形壁阻腿605。
42.除此之外,弧形连杆603中部通过销轴转动设置有限位杆604,限位杆604外端与分类移动块1外壁开设的孔转动连接。
43.除此之外,弧形壁阻腿605内端通过销轴转动连接有平衡杆606,平衡杆606外端与分类移动块1外壁开设的孔转动连接。
44.转动运动盘601的轴穿过分类移动块1外壁延伸至方腔103内部并套接有传动齿轮a607,传动齿轮a607圆周外壁啮合连接有传动齿轮b608,传动齿轮b608与第一电机105同轴连接。
45.本发明通过传动齿轮a607转动,带动了转动运动盘601转动,而转动运动盘601外壁靠近边缘处设置有偏心轴602,此时偏心轴602转动,带动了弧形连杆603进行运动。
46.本发明通过弧形连杆603进行运动,同时,受到限位杆604的限位,使得弧形连杆603外端进行一上一下的摆动,从而带动了弧形壁阻腿605运动。
47.本发明通过弧形壁阻腿605运动,而弧形壁阻腿605受到平衡杆606的限位,从而使得弧形壁阻腿605外端爹贴近底面进行爬动。
48.本发明通过第一电机105输出轴转动,而传动齿轮b608与第一电机105同轴连接,使得传动齿轮b608发生转动,而传动齿轮a607圆周外壁啮合连接有传动齿轮b608,从而使得两个传动齿轮a607转动。
49.工作原理:当需要该垃圾分类机器人的带式垃圾分类装置时,首先,将垃圾放入到固定板7上,识别分类主体8对垃圾进行识别,此时,通过控制器驱动第二电机5015输出轴转
动,而第二电机5015输出轴穿过机腔b5013内壁延伸至圆腔5014内部并套接有开闭齿轮5016,从而使得开闭齿轮5016进行转动,而开闭齿轮5016圆周外壁穿过圆腔5014内壁延伸至环形腔503内部并与环形齿条508啮合连接,从而带动了环形齿条508转动,通过环形齿条508转动,使得环形块507上的导向槽509改变位置,而导向槽509呈弧度设置且呈倾斜结构设置,导向槽509与限位导柱5012滑动连接,从而使得连接限位块5011运动,从而带动了扇形门5010打开,而通过管道504呈倾斜结构的设置,使垃圾可以顺着管道504顺利落入腔内,避免了堵塞的情况,此时,通过控制器驱动第一电机105输出轴转动,而传动齿轮b608与第一电机105同轴连接,使得传动齿轮b608发生转动,而传动齿轮a607圆周外壁啮合连接有传动齿轮b608,从而使得两个传动齿轮a607转动,通过传动齿轮a607转动,带动了转动运动盘601转动,而转动运动盘601外壁靠近边缘处设置有偏心轴602,此时偏心轴602转动,带动了弧形连杆603进行运动,弧形连杆603进行运动,同时,受到限位杆604的限位,使得弧形连杆603外端进行一上一下的摆动,从而带动了弧形壁阻腿605运动,过弧形壁阻腿605运动,而弧形壁阻腿605受到平衡杆606的限位,从而使得弧形壁阻腿605外端爹贴近底面进行爬动,使其在不同的时间可以至少两点的定点,使其在不同的时间段可以位于不同的位置,从而根据时间居民可以对其进行使用分类。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1