一种全地下垃圾压缩中转站的制作方法
1.本发明涉及垃圾处理技术,特别涉及一种全地下垃圾压缩站。
背景技术:
2.现有垃圾压缩中转站已由地面处理模式逐渐转为地下处理模式,均是在地面建设房屋,房屋中设置地坑,地坑中放置有垃圾压缩装置,垃圾运输车进入房屋后,将垃圾倾倒入垃圾压缩装置中,垃圾压缩装置将垃圾推入垃圾压缩箱,然后举升机构将垃圾压缩箱举升至地面的垃圾转运车上,由垃圾转运车将垃圾压缩箱拖走。
3.上述垃圾压缩中转站的不足之处在于,垃圾车需要在地面进行垃圾倾倒,地坑仍直接与地面连通,垃圾中的臭味仍然很容易在垃圾压缩中转站附近扩散,污水容易在地面扩散,从而导致环境污染。
技术实现要素:
4.本技术通过提供一种全地下垃圾压缩中转站,垃圾的倾倒与压缩作业完全在地下进行,大大降低了垃圾压缩中转站对环境的影响。
5.本技术实施例提供了一种全地下垃圾压缩中转站,包括:
6.装卸工作区,所述装卸工作区为地面下方开设的空间并与地面之间设置有通道口;
7.压缩工作区,所述压缩工作区位于装卸工作区下方的地层中,所述压缩工作区顶部开设有与所述装卸工作区连通的卸料口、移箱口;
8.压缩主机,所述压缩主机位于所述压缩工作区中,所述压缩主机上端的进料口设置于所述卸料口中;
9.轨道a,所述轨道a设置于所述压缩主机的出料口处;
10.垃圾压缩箱,所述垃圾压缩箱放置于所述轨道a上并与所述压缩主机对接;
11.轨道b,所述轨道b相对于所述压缩主机设置于所述轨道a的另一端,所述轨道b与所述轨道a之间具有夹角;
12.箱体转运装置,所述箱体转运装置可移动的设置于所述轨道b上,所述箱体转运装置用于带动所述垃圾压缩箱左右运动;
13.双向推拉装置,所述双向推拉装置与所述轨道a并列设置,所述双向推拉装置用于带动所述垃圾压缩箱前后运动;
14.举升装置,所述举升装置相对于所述轨道b设置于双向推拉装置的另一端并设置于所述移箱口的正下方,所述举升装置用于在所述装卸工作区与所述压缩工作区之间运送所述垃圾压缩箱。
15.本实施例的工作过程:垃圾车通过通道口进入装卸工作区中,垃圾车将垃圾通过卸料口投入压缩主机中,压缩主机将垃圾压缩完成后,由箱体转运装置将垃圾压缩箱转运至双向推拉装置上,双向推拉装置将垃圾压缩箱送至举升装置中,由举升装置将垃圾压缩
箱送入装卸工作区中并由运输车将垃圾压缩箱运输走。
16.上述实施例的有益效果在于:通过设置位于地下的装卸工作区、压缩工作区,实现在地下进行垃圾倾倒作业和垃圾压缩作业,极大地降低了垃圾处理时对周边环境的影响和污染,并且设置的双向推拉装置将举升装置向后位移,即将移箱口向后位移,扩大了装卸工作区中移箱口前侧的空间区域,即扩大了运输车作业空间,便于运输车进行掉头、转弯等动作。
17.在上述实施例的基础上,本技术实施例还可以做如下改进:
18.在本技术其中一个实施例中:所述压缩主机包括:机体、推拉机构a,所述推拉机构a安装于所述机体;所述推拉机构a包括:驱动机构a、导向座a、滑块a、锁紧组件a,所述导向座a与驱动机构a连接于所述机体,所述滑块a滑动设置于所述导向座a并与所述驱动机构a连接,所述锁紧组件a连接于所述滑块a,所述锁紧组件具有锁钩a,所述垃圾压缩箱设置有与所述锁钩a对应的对接杆。本步的有益效果:通过推拉机构a能够实现快速移动垃圾压缩箱的功能,提高了垃圾压缩箱的转运效率。
19.在本技术其中一个实施例中:所述压缩主机还包括:排污机构,所述排污机构包括:锥斗、排污箱、过滤网一、过滤网二、接头,所述锥斗安装于所述机体下端并用于汇集压缩垃圾产生的液体,所述排污箱安装于所述锥斗下端,所述过滤网一为抽屉型且放置于所述排污箱中部设置的隔板上,所述接头安装于所述排污箱并用于与排污管道连接,所述过滤网二设置于所述排污箱安装所述接头的位置。本步的有益效果:通过排污机构能够及时将垃圾中废水从压缩主机中排出,降低废水对环境和垃圾压缩主机的影响。
20.在本技术其中一个实施例中:所述箱体转运装置包括:滚轮a、框架a、移箱车、轨道c、驱动机构b,所述滚轮a转动安装于所述框架a并滚动设置于所述轨道b上,所述轨道c设置于所述框架a,所述移箱车设置于所述轨道c上,所述驱动机构b与所述移箱车连接并用于驱动所述移箱车沿所述轨道c运动,所述移箱车朝向所述垃圾压缩箱的端部设置有卡扣a,所述垃圾压缩箱对应所述卡扣a设置有卡扣b。
21.在本技术其中一个实施例中:所述双向推拉装置包括:框架b、小车、轨道d、驱动机构c,所述框架b设置于所述轨道b与所述举升装置之间,所述轨道d设置于所述框架b,所述小车设置于所述轨道d上,所述驱动机构c与所述小车连接并用于驱动所述小车沿所述轨道d运动。本步的有益效果:通过双向推拉装置,能够在箱体装运装置与举升装置之间移动垃圾压缩箱。
22.在本技术其中一个实施例中:所述驱动机构c包括:电机、链轮组、链条a、支撑轮a,所述电机安装于所述框架b,所述链轮组安装于所述框架b与所述电机的输出轴,所述链条a的一端安装于所述小车前端、另一端安装于所述小车后端,所述链轮组用于在所述电机与所述链条a之间进行传动,所述链条a沿长度方向依次转动连接有多个所述支撑轮a,所述支撑轮a滚动设置于所述框架b设置的支撑轨道上。本步的有益效果:通过支撑轮a在支撑轨道上滚动,从而对链条a进行支撑,防止链条a因为长度过长而自然悬垂的现象出现,提高链条a运动的稳定性与流畅性。
23.在本技术其中一个实施例中:所述小车包括:车体、驱动机构d、联动支架、定位杆、卡爪、支撑轮b,所述驱动机构d安装于所述车体,所述驱动机构d朝向所述车体两侧均连接有所述联动支架,所述定位杆与所述卡爪安装于所述联动支架,所述定位杆具有插接端a,
所述插接端a朝向背离所述小车的方向设置,所述卡爪具有插接端b,所述插接端b朝向所述小车中部的方向设置,所述车体前端与后端对应所述插接端a开设有定位孔,所述垃圾压缩箱的左右侧壁对应所述插接端b设置有卡槽,所述支撑轮b有两个且转动设置于所述车体的上端两侧,所述垃圾压缩箱下端面两侧设置有与所述支撑轮b配合的导向面。本步的有益效果:通过设置同时安装于联动支架的卡爪和定位杆,并且设置方向相反的插接端a与插接端b,使得卡爪卡入卡槽将垃圾压缩箱定位于小车时,定位杆从定位孔中他脱出,此时小车可以带动垃圾压缩箱同步运动,反之,卡爪从卡槽中脱出,垃圾压缩箱与小车脱离,同时定位杆插入定位孔中,使得小车稳定定位于框架b,防止垃圾压缩箱在位移时小车发生移动。
24.在本技术其中一个实施例中:所述举升装置包括:举升平台、导杆、驱动机构e,所述导杆沿竖向设置,所述驱动机构e与所述举升平台连接并驱动所述举升平台沿所述导杆上下运动。
25.在本技术其中一个实施例中:所述举升装置还包括:推拉机构b,所述推拉机构b安装于所述举升平台,所述推拉机构b包括:驱动机构f、导向座b、滑块b、锁紧组件b,所述导向座b与驱动机构f连接于所述举升平台,所述滑块b滑动设置于所述导向座b并与所述驱动机构f连接,所述锁紧组件b连接于所述滑块b,所述锁紧组件具有锁钩b,所述锁钩b用于钩接所述垃圾压缩箱对应设置的对接杆。本步的有益效果:通过推拉机构b使得垃圾压缩箱能够快速移动至举升平台上,从而提高垃圾压缩箱的流转效率。
附图说明
26.图1为装卸工作区结构示意图;
27.图2为压缩工作区结构示意图;
28.图3为实施例结构示意图一;
29.图4为实施例结构示意图二;
30.图5为垃圾压缩箱结构示意图一;
31.图6为垃圾压缩箱结构示意图二;
32.图7为推拉机构a结构示意图;
33.图8为锁钩装置结构示意图一;
34.图9为锁钩装置结构示意图二;
35.图10排污机构结构示意图一;
36.图11排污机构结构示意图二;
37.图12排污机构结构示意图三;
38.图13为垃圾压缩箱结构示意图一;
39.图14为垃圾压缩箱结构示意图二;
40.图15为箱体转运装置结构示意图一;
41.图16为箱体转运装置结构示意图二;
42.图17为双向推拉装置结构示意图一;
43.图18为双向推拉装置结构示意图二;
44.图19为举升装置结构示意图一;
45.图20为举升装置结构示意图二。
46.其中,1装卸工作区,2压缩工作区,4轨道a,6轨道b,10通道口,11卸料口,12移箱口;
47.3压缩主机,301进料口,302机体,303推拉机构a,304压缩筒,305压头,306压缩油缸,307导轨,308连接块,309闸门,310驱动油缸,311驱动机构a,312导向座a,313滑块a,314锁紧组件a,315锁紧油缸a,316锁钩a,317锁钩装置,318连接座,319驱动件a,320转动件,321连接件,322钩爪,323导向槽,324钩接部,325连接部,326导向部,327排污机构,328锥斗,329排污箱,330过滤网一,331过滤网二,332接头,333压盖,334插销;
48.5垃圾压缩箱,501对接杆,502钩接槽,503箱体,504后门,505连杆,506驱动件b,507腰型槽,508定位柱a,509勾爪a,510框架体,511移门,512封板,513导向杆,514限位杆,515块体,516插槽,517限位块,518限位面,519锁紧机构,520驱动件c,521勾爪b,522定位柱b,523卡扣b,524导向面,525定位面,526卡槽,527滚轮c;
49.7箱体转运装置,701滚轮a,702框架a,703移箱车,704轨道c,705卡扣a,706车架,707滚轮b,708安装板,709导向轮a,710导向轮b;
50.8双向推拉装置,801框架b,802小车,803轨道d,804驱动机构c,805支撑轨道,806车体,807驱动机构d,808联动支架,809定位杆,810卡爪,811支撑轮b,812支撑轮c,813定位孔,814行走面;
51.9举升装置,901举升平台,902导杆,903驱动机构e,904机架,905导向轮组,906平行四边形升降架,907举升油缸,908推拉机构b,909驱动机构f,910导向座b,911滑块b,912锁紧组件b,913支撑轮组。
具体实施方式
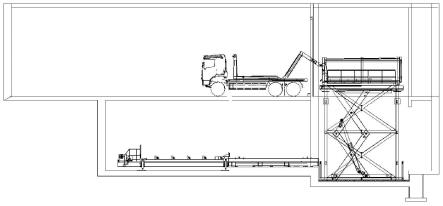
52.如图1-4所示,一种全地下垃圾压缩中转站,包括:装卸工作区1、压缩工作区2、压缩主机3、轨道a4、垃圾压缩箱5、轨道b6、箱体转运装置7、双向推拉装置8、举升装置9,装卸工作区1为地面下方开设的空间并与地面之间设置有通道口10,压缩工作区2位于装卸工作区1下方的地层中,压缩工作区2顶部开设有与装卸工作区1连通的卸料口11、移箱口12,即装卸工作区1位于地下一层,压缩工作区2位于地下二层,压缩主机3位于压缩工作区2中,压缩主机3上端的进料口301设置于卸料口11中,垃圾车将收集来的垃圾倾倒入卸料口11中,垃圾通过进料口301进入压缩主机3中;轨道a4设置于压缩主机3的出料口处,轨道a4沿平行于出料方向延伸,垃圾压缩箱5放置于轨道a4上并与压缩主机3对接,轨道b6相对于压缩主机3设置于轨道a4的另一端,轨道b6与轨道a4之间具有夹角,该夹角为90
°
,即轨道b6垂直于轨道a4,箱体转运装置7可移动的设置于轨道b6上,箱体转运装置7用于带动垃圾压缩箱5左右运动,双向推拉装置8与轨道a4并列且间隔设置,双向推拉装置8用于带动垃圾压缩箱5前后运动,举升装置9相对于轨道b6设置于双向推拉装置8的另一端并设置于移箱口12的正下方,举升装置9用于在装卸工作区1与压缩工作区2之间运送垃圾压缩箱5。
53.垃圾车经过通道口10进入装卸工作区1中,垃圾车将垃圾通过卸料口11投入压缩主机3中,压缩主机3将垃圾压缩完成后,由箱体转运装置7将垃圾压缩箱5转运至双向推拉装置8上,双向推拉装置8将垃圾压缩箱5送至举升装置9中,由举升装置9将垃圾压缩箱5送入装卸工作区1中并由运输车将垃圾压缩箱5运输走,从而实现了全地下模式的垃圾倾倒、压缩中转的处理作业,设置双向推拉装置8是为了将举升装置9向后位移,即将移箱口12向
后位移,增加了移箱口12前方的空间,扩大了运输车作业的空间,便于运输车进行掉头、转弯等动作。
54.压缩主机3包括:机体302、推拉机构a303,推拉机构a303安装于机体302,机体302用于与垃圾压缩箱5配合去压缩垃圾,推拉机构a303用于将垃圾压缩箱5从轨道a4上快速拉近压缩主机3或者将垃圾压缩箱5从轨道a4上向箱体转运装置7推出。
55.如图5、6所示,机体302包括:压缩筒304、压头305、压缩油缸306、导轨307、连接块308、闸门309、驱动油缸310,压缩筒304沿横向设置,压缩筒304的一端为敞口结构,压头305滑动设置于压缩筒304中,压缩油缸306安装于压缩筒304并与压头305连接,压缩油缸306用于驱动压头305在压缩筒304中沿横向位移,压缩筒304的敞口处为垃圾出口处,压缩筒304敞口的两侧处沿竖向安装有导轨307,连接块308沿竖向滑动设置于导轨307上,连接块308朝向压缩筒304的一端与闸门309连接,另一端与驱动油缸310连接,由驱动油缸310驱动闸门309上下运动,实现压缩筒304敞口处的开闭功能。
56.如图7所示,推拉机构a303包括:驱动机构a311、导向座a312、滑块a313、锁紧组件a314,导向座a312与驱动机构a311连接于压缩筒304下端,导向座a312沿压缩筒304长度方向延伸并设置于闸门309侧的压缩筒304的下端,滑块a313滑动设置于导向座a312并与驱动机构a311连接,驱动机构a311包括电机和丝杠螺母副结构,电机的输出轴与丝杠螺母副中的丝杠的端部连接,丝杠转动安装于导向座a312,丝杠螺母副中的螺母与滑块a313连接,通过电机驱动丝杠转动,由螺母沿着丝杠运动带动滑块a313沿着导向座a312滑动,锁紧组件a314连接于滑块a313,锁紧组件具有锁紧油缸a315、锁钩a316,锁紧油缸a315铰接于滑块a313,缩紧油缸a的输出端与锁钩a316的端部铰接,锁钩a316的另一端为钩状结构,锁钩a316的中部铰接于滑块a313,垃圾压缩箱5端部对应锁钩a316设置有对接杆501,锁钩a316钩接于对接杆501,从而将垃圾压缩箱5与滑块a313固接。
57.推拉机构a303推拉垃圾压缩箱5时由锁紧油缸a315带动锁钩a316转动,由锁钩a316的钩状部位钩住对接杆501,将垃圾压缩箱5与滑块a313固接,然后由驱动机构a311动作,带动滑块a313沿着导向座a312运动,从而实现对垃圾压缩箱5的推拉功能。
58.如图5所示,压缩主机3还包括:锁钩装置317,锁钩装置317用于与垃圾压缩箱5钩接,使得压缩主机3压缩垃圾时,垃圾压缩箱5能够稳定的连接于压缩主机3。
59.如图8、9所示,锁钩装置317的具体结构如专利一种锁钩装置317(公开号cn216271213u)所公开,现将其中实现钩接功能的结构复述如下,一种锁钩装置317,包括:连接座318、驱动件a319、转动件320、连接件321、钩爪322,连接座318与压缩筒304外壁连接,连接座318开设有导向槽323,导向槽323为上下贯通的通槽,导向槽323包括首尾相接的直线段与弧形段,直线段位于靠近驱动件a319的一侧,直线段沿压缩主机3压缩垃圾的方向延伸,弧形段朝向背离压缩筒304外壁的方向弯折,其中,弧形段优选为圆弧形结构;驱动件a319铰接于连接座318,驱动件a319具有沿直线运动的输出端,驱动件a319采用液压缸,输出端即为液压缸活塞杆的端部;转动件320的一端与输出端铰接,另一端与连接座318铰接,连接件321的一端与输出端铰接;钩爪322的一端为钩接部324、另一端为连接部325,钩接部324与连接部325之间设置有导向部326,导向部326与连接部325相邻设置,连接件321的另一端(远离输出端的端部)与连接部325铰接,连接部325、导向部326滑动设置于导向槽323中,当导向部326位于弧形段中时,连接部325位于直线段中,垃圾压缩箱5的外壁两侧对应
钩接部324开设有相匹配的钩接槽502。
60.钩爪322钩接垃圾压缩箱5的过程如下,输出端朝向驱动件a319内回缩,驱动件a319整体带动转动件320朝向压缩筒304方向转动,同时后拉连接件321,使得导向部326由弧形段中运动至直线段中,该过程中,钩爪322整体向驱动件a319所在侧运动,钩接部324朝向内侧(内侧指压缩筒304所在方位)转动,直至钩接部324完全钩入钩接槽502中,从而稳定的将垃圾压缩箱5定位于压缩主机3上,垃圾压缩箱5与压缩主机3脱离过程中的锁钩装置317运动方式为上述钩接动作的逆过程。
61.如图10、11、12所示,压缩主机3还包括:排污机构327,排污机构327安装于压缩筒304的下端,排污机构327包括:锥斗328、排污箱329、过滤网一330、过滤网二331、接头332、压盖333,锥斗328安装于机体302下端并用于汇集压缩垃圾产生的液体,排污箱329安装于锥斗328下端,过滤网一330为抽屉型且放置于排污箱329中部设置的隔板上,接头332安装于排污箱329并用于与排污管道连接,过滤网二331设置于排污箱329安装接头332的位置,排污箱329一个侧面与上端面开设置有连通的开口,开口上设置有压盖333,压盖333一端设置有插销334,插销334插设于排污箱329设置的插孔中,从而将压盖333定位于排污箱329,压盖333用于将开口封闭。
62.排污机构327在工作时,由锥斗328扩大排污机构327收集污水的范围,污水进入排污箱329后,通过过滤网一330形成第一道过滤,由于过滤网一330为抽屉状,使得垃圾可以汇集于过滤网一330中,污水通过接头332后排入排污管道中,过滤网二331能够对污水中的杂质起到二次过滤作用,在压盖333上端面与侧面开设连通的开口目的在于,便于人工取出过滤网一330,因为如果侧面不开设开口,过滤网一330需要倾斜较大的角度后才能取出,该过程中过滤网一330中的垃圾容易掉出,不便于人工操作,故而在侧面与上端面开设连通的开口,便于将过滤网一330稳定的取出。
63.如图13所示,垃圾压缩箱5包括:箱体503、后门504、连杆505、驱动件b506,箱体503表面设置有腰型槽507和定位柱a508,后门504连接于箱体503,后门504设置有勾爪a509,勾爪a509用于与定位柱a508钩接连接,连杆505的一端滑动铰接于箱体503开设的腰型孔,另一端与后门504固定连接,驱动件b506安装于箱体503并与连杆505连接,驱动件b506采用液压缸,驱动件b506的一端铰接于箱体503,另一端铰接于连杆505,驱动件b506用于驱动连杆505在腰型孔中运动,设置腰型孔的目的在于,使定位柱a508能够进入钩接槽502或者从钩接槽502中移出,如果不设置腰型孔,连杆505则只能围绕铰接点转动而不发生位移,从而钩接槽502也只能进行转动,这样会导致定位柱a508无法完全进入钩接槽502中。
64.如图13所示,后门504还包括:框架体510、移门511,框架体510设置有开口,开口上方为封板512,框架体510两侧设置有对称的滑槽,移门511两侧设置有导向杆513,导向杆513滑动设置于滑槽中,移门511朝向后门504一侧的表面设置有密封条,密封条分别与封板512表面、滑槽表面接触,从而提高移门511处的密封性,减少臭气或者污染物的外溢,框架体510沿横向设置有限位杆514,移门511设置有位于限位杆514上方的块体515,块体515下端面与限位杆514上端面接触,从而可以通过限位杆514将移门511定位,防止移门511下滑,块体515背离后门504的表面开设有插槽516,闸门309中部表面沿横向设置有插杆,插杆用于插入插槽516中,从而由闸门309运动带动移门511同步运动,最终由压缩主机3将垃圾通过开口推入垃圾压缩箱5中。
65.如图13所示,垃圾压缩箱5还包括:限位块517,限位块517为橡胶体,限位块517安装于箱体503的上端,限位块517上端朝向连杆505的侧面设置有限位面518,限位面518为与竖直平面具有夹角的斜面,限位面518用于在后门504打开时与连杆505接触,设置限位块517的原因如下,司机为了将无法靠自重倒出的垃圾倒出而采用移动车辆使后轮撞击轮挡的方法时,由于连杆505与后门504具有惯性,当车辆在撞击到轮挡突然停止时,连杆505和后门504会因惯性继续运动,从而导致驱动件b506过摆,容易使驱动件b506损坏,故而设置限位块517对连杆505位置进行限位,防止过摆现象出现,从而便于延长驱动件b506的使用寿命。
66.如图13所示,垃圾压缩箱5构还包括:锁紧机构519,锁紧机构519包括:驱动件c520、勾爪b521,驱动件c520采用液压缸,驱动件c520安装于箱体503,勾爪b521的中部铰接于箱体503,勾爪b521的一端与驱动件c520连接,驱动件c520用于驱动勾爪b521转动,后门504下端凸设有定位柱b522,勾爪b521的另一端用于与定位柱b522钩接连接,从而通过锁紧机构519能够提高后门504定位于箱体503的稳定性。
67.如图15、16所示,箱体转运装置7包括:滚轮a701、框架a702、移箱车703、轨道c704、驱动机构b,滚轮a701通过转轴a转动安装于框架a702并滚动设置于轨道b6上,框架a702上还安装有电机和传动机构,传动机构设置于电机的输出轴与转轴a之间,传动机构可以采用齿轮传动、链传动等,如采用齿轮传动时,在电机输出轴和转轴a上均安装有相互啮合的齿轮,通过电机驱动滚轮a701转动,从而使得箱体转运装置7在轨道b6上运动;轨道c704设置于框架a702,移箱车703设置于轨道c704上,驱动机构b与移箱车703连接并用于驱动移箱车703沿轨道c704运动,移箱车703朝向垃圾压缩箱5的端部设置有卡扣a705,垃圾压缩箱5对应卡扣a705设置有卡扣b523。
68.如图16所示,移箱车703包括:车架706、滚轮b707,滚轮b707通过转轴b转动安装于车架706;驱动机构b举例如下,例一,驱动机构b采用电机与丝杠螺母副配合,电机安装于框架a702,丝杠螺母副中的丝杠转动安装于框架a702,丝杠端部与电机输出轴连接,丝杠螺母副中的螺母连接于丝杠上,螺母还与移箱车703连接,由电机驱动丝杠转动,使得螺母沿着丝杠运动,从而由螺母拖动移箱车703沿着轨道c704运动,例二,驱动机构b采用电机与传动齿轮,电机安装于移箱车703,电机的输出轴和转轴b均安装有传动齿轮,两个传动齿轮相互啮合,从而由电机可以驱动滚轮b707在轨道c704上滚动。
69.如图13、16所示,轨道c704有两根且沿车架706宽度方向相互间隔设置,轨道c704位于同一平面内,轨道c704沿车架706长度方向延伸,轨道c704正上方设置有与轨道c704平行的安装板708,安装板708连接于车架706,箱体转运装置7还包括:导向轮a709、导向轮b710,导向轮a709有多个且依次沿安装板708长度方向间隔设置于安装板708,导向轮a709转动安装于安装板708,导向轮a709滚动轴线与安装板708的表面平行且沿垂直于安装板708的长度方向设置,安装板708沿长度方向还依次间隔安装有沿竖向设置的支架,支架转动安装有导向轮b710,导向轮b710位于安装板708的上方,导向轮b710的转动轴线垂直于安装板708的上表面,垃圾压缩箱5的下端面设置有两个沿垃圾压缩箱5宽度方向间隔设置的导向面524,导向面524沿垃圾压缩箱5的长度方向延伸,导向面524与导向轮a709对应设置,由导向轮a709在导向面524上滚动,从而引导垃圾压缩箱5沿着导向轮a709运动,垃圾压缩箱5下端两侧具有定位面525,导向轮b710用于在定位面525上滚动,从而限制垃圾压缩箱5
只能在两侧的导向轮b710之间运动,从而确保垃圾压缩箱5在框架a702上运动和定位的稳定性。
70.如图17所示,双向推拉装置8包括:框架b801、小车802、轨道d803、驱动机构c804,框架b801设置于轨道b6与举升装置9之间,轨道d803设置于框架b801,小车802设置于轨道d803上,驱动机构c804与小车802连接并用于驱动小车802沿轨道d803运动。
71.如图17所示,驱动机构c804包括:电机、链轮组、链条a、支撑轮a,电机安装于框架b801,链轮组安装于框架b801与电机的输出轴,链条a的一端安装于小车802前端、另一端安装于小车802后端,链轮组用于在电机与链条a之间进行传动,链条a沿长度方向依次转动连接有多个支撑轮a,支撑轮a滚动设置于框架b801设置的支撑轨道805上。
72.如图17所示,驱动机构c804还包括:链条b,链轮组包括:链轮a、链轮b,链轮a安装于电机的输出轴,框架b801的前端安装有轴体a、后端安装有轴体b,轴体a的两端分别安装有一个链轮b,轴体a伸出至框架外侧端部的链轮b与链轮a之间绕设有链条b,链条b两端相互连接形成闭合结构并用于将电机的动力传递给轴体a;轴体a另一端的链轮b和轴体b上的链轮b之间设置有链条a,链条a的一端与小车802前侧连接、另一端与小车802后侧连接,由电机驱动链条b转动,通过轴体a的链轮b与轴体b的链轮b配合传动,使得链条a运动,从而由链条b拖动小车802在轨道d803上前后运动。
73.如图18所示,小车802包括:车体806、驱动机构d807、联动支架808、定位杆809、卡爪810、支撑轮b811、支撑轮c812,驱动机构d807安装于车体806,驱动机构d807朝向车体806两侧均连接有联动支架808,具体的,驱动机构d807为两个油缸,两个油缸的活塞杆同轴相背设置,即两根活塞杆朝向两个相反的方向同步运动,定位杆809与卡爪810安装于联动支架808,定位杆809具有插接端a,插接端a朝向背离小车802的方向设置,卡爪810具有插接端b,插接端b朝向小车802中部的方向设置,车体806前端与后端对应插接端a开设有定位孔813,垃圾压缩箱5的左右侧壁对应插接端b设置有卡槽526,支撑轮b811有两组且转动设置于车体806的上端前后两侧,每组具有两个支撑轮b811,车体806前端与后端均转动设置有两个支撑轮c812,支撑轮b811、支撑轮c812用于与导向面524配合并通过支撑导向面524运动使得垃圾压缩箱5流畅的运动。
74.通过设置联动支架808,并配合插接端a与插接端b的布置方向,使得插接端a插入定位孔813中时,插接端b从卡槽526中脱出,插接端b插入卡槽526中时,插接端a从定位孔813中脱出,从而能够保证垃圾压缩箱5定位于车体806时,车体806可以沿着轨道b6运动,垃圾压缩箱5与车体806脱离时,车体806能够稳定定位于框架b801上。
75.如图17所示,车体806上端还设置有两条相互平行的行走面814,两个行走面814沿车体806宽度方向间隔设置,垃圾压缩箱5下端面安装有滚轮c527,滚轮c527用于在行走面814上滚动,滚轮c527相对于卡槽526设置于垃圾压缩箱5的另一端,滚轮c527用于在行走面814上滚动。
76.由于滚轮c527相对于支撑轮b811设置于垃圾压缩箱5的另一端,而车体806先通过卡爪810卡接卡槽526后将垃圾压缩箱5牵引入车体806上,故而需要设置支撑轮b811和支撑轮c812先对导向面524进行支撑,保证垃圾压缩箱5的一端先稳定的运动至车体806上,而后由垃圾压缩箱5另一端的滚轮c527移动至行走面814后在行走面814上滚动,从而在垃圾压缩箱5运动时,垃圾压缩箱5的两端都实现稳定的支撑定位。
77.如图19、20所示,举升装置9包括:举升平台901、导杆902、驱动机构e903,导杆902沿竖向设置,驱动机构e903与举升平台901连接并驱动举升平台901沿导杆902上下运动。
78.如图19、20所示,举升装置9还包括:机架904,导杆902沿竖向安装于机架904的四个角落,举升平台901的四个角落具有导向轮组905,所述导向轮组905具有两个相互间隔的导向轮c,同一组导向轮c之间的间距与导杆902尺寸相当,同一组的导向轮c沿竖向滚动设置于截面呈矩形的导杆902相对的两个表面上,从而通过导向轮组905使得举升平台901可以稳定、流畅的沿导杆902上下位移。
79.如图19所示,驱动机构e903包括平行四边形升降架906以及两端分别与平行四边形升降架906上部和下部铰接的举升油缸907,平行四边形升降架906顶端与举升平台901底面铰接连接,底端与机架904的底端铰接,举升油缸907带动平行四边形升降架906变形,从而控制举升油缸907高度。
80.如图19、20所示,举升装置9还包括:推拉机构b908,推拉机构b908安装于举升平台901,推拉机构b908包括:驱动机构f909、导向座b910、滑块b911、锁紧组件b912,导向座b910与驱动机构f909安装于举升平台901的下表面,滑块b911滑动设置于导向座b910并与驱动机构f909连接,举升平台901开设有条状孔,滑块b911上端穿过条状孔伸出至举升平台901上方,锁紧组件b912连接于滑块b911的上端面,锁紧组件具有锁钩b,锁钩b用于钩接对接杆501。
81.驱动机构f909与驱动机构a311结构相似,均是通过电机驱动丝杠螺母副带动滑块b911沿着导向座b910运动,锁紧组件b912与锁紧组件a314结构相同,锁钩b用于钩接对接杆501,从而将垃圾压缩箱5与滑块b911固接为一个整体。
82.举升装置9还还包括两套支撑轮组913,两套支撑轮组913分别位于举升平台901的前后两端,支撑轮组913包括连个相互间隔的支撑轮d,支撑轮d转动安装于举升平台901,支撑轮d用于支撑导向面524,以此提高垃圾压缩箱5转运的流畅性。
83.本全地下垃圾压缩中转站的工作过程如下:
84.垃圾车通过通道口10进入装卸工作区1,垃圾车将收集的垃圾通过卸料口11投入压缩主机3中;
85.压缩主机3中的压头305动作,通过闸门309打开后的开口将垃圾压入垃圾压缩箱5中,直至垃圾装填满垃圾压缩箱5;
86.锁钩装置317中的钩爪322在驱动件a319的带动下向外张开,使得压缩主机3与垃圾压缩箱5之间解锁;
87.推拉机构a303将垃圾压缩箱5向前推动,使得垃圾压缩箱5的后端运动至轨道b6处,箱体转运装置7朝向垃圾压缩箱5运动,卡扣b523与卡扣a705对接;
88.移箱车703朝向轨道c704的另一侧运动,由卡扣a705拉动卡扣b523,从而拖动压缩垃圾压缩箱5完全运动至轨道c704上;
89.箱体转运装置7带动垃圾压缩箱5运动至双向推拉装置8后端,移箱车703朝向双向推拉装置8运动,使得垃圾压缩箱5的前端移动至小车802上;
90.驱动机构d807带动联动支架808运动,使得卡爪810卡接入垃圾压缩箱5表面的卡槽526中,同时定位杆809从定位孔813中脱出;
91.驱动机构c804驱动小车802带动垃圾压缩箱5朝向举升装置9运动,运动到位后,垃
圾压缩箱5的前端进入举升平台901上方,驱动机构d807带动联动支架808运动,使得卡爪810从卡槽526中脱出,同时定位杆809插入定位孔813中,使得小车802保持定位;
92.推拉机构b908动作,由锁钩b钩接对接杆501,通过驱动机构f909带动滑块b911运动,拖动垃圾压缩箱5完全运动至举升平台901上方;
93.驱动机构e903动作,推动举升平台901带着垃圾压缩箱5通过移箱口12进入装卸工作区1,最后由垃圾运输处将垃圾压缩箱5拖走,以此完成垃圾压缩中转作业。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1