一种垃圾回收机器人及垃圾回收方法与流程
1.本发明涉及垃圾回收技术领域,尤其涉及一种垃圾回收机器人及垃圾回收方法。
背景技术:
2.根据隔离医院或者传染病医院中的管理要求,医院内设置的隔离房间要求每天的早、中、晚都要进行一次垃圾的回收与消毒。现有的一个医院设置有几千甚至上万个病房,给垃圾回收工作带来了巨大的挑战,且人工的成本高,效率低;另外,在隔离医院或中传染病医院的工作,使得工作人员随时面临巨大的感染风险。
3.因此,亟需研究一种机器人,代替人工收取垃圾,以提高垃圾收取效率、降低成本,并避免人工被感染问题。
技术实现要素:
4.本发明的目的在于提供一种垃圾回收机器人及垃圾回收方法,以解决现有人工收取垃圾效率低,且成本高的问题。
5.为达上述目的,本发明采用以下技术方案:
6.一方面,本发明提供一种垃圾回收机器人,该垃圾回收机器人包括:
7.机器人本体,所述机器人本体能按预定路线巡航;
8.货架,所述货架可拆卸连接于所述机器人本体,所述货架上放置有垃圾桶,所述垃圾桶用于盛放待回收垃圾袋;
9.机械臂,所述机械臂设于所述机器人本体;
10.抓手组件,所述抓手组件设于所述机械臂的工作端,用于抓取所述待回收垃圾袋,并将所述待回收垃圾袋的开口收紧。
11.作为优选,所述待回收垃圾袋包括垃圾袋本体和抽绳,所述抓手组件包括:
12.抓手支架,所述抓手支架设于所述机械臂的工作端;
13.收拢组件,所述收拢组件设于所述抓手支架,用于止挡垃圾袋本体;
14.抓取件,所述抓取件设于所述抓手支架,用于抓取所述待回收垃圾袋的抽绳并将所述抽绳从所述垃圾袋本体中抽出。
15.作为优选,所述抓取件包括挂钩和收绳驱动件,所述收绳驱动件设于所述抓手支架,所述挂钩可移动地设于所述抓手支架,且与所述收绳驱动件的输出端传动连接。
16.作为优选,所述抓取件还包括转盘和辅绕杆,所述转盘转动设于所述抓手支架,且与所述收绳驱动件的输出端传动连接,所述挂钩包括主绕杆和设于所述主绕杆的一端的止挡件,所述止挡件和所述主绕杆呈夹角设置,所述主绕杆和所述辅绕杆均设于所述转盘。
17.作为优选,所述收拢组件包括第一收拢件、第二收拢件和收拢驱动件,所述收拢驱动件设于所述抓手支架,所述第一收拢件设有第一收拢口,所述第二收拢件设有第二收拢口,所述收拢驱动件用于所述第一收拢件和所述第二收拢件能相互靠近或远离,所述第一收拢件和所述第二收拢件相互靠近的状态下,能将所述抽绳收拢至所述第一收拢口和所述
第二收拢口形成的收袋孔内,当所述抽绳从所述垃圾袋本体中抽出预设长度时,所述垃圾袋本体的上部能穿过所述收袋孔。
18.作为优选,所述第一收拢件和所述第二收拢件均转动设于所述抓手支架,且分别与所述收拢驱动件的两个输出端传动连接。
19.作为优选,所述收拢组件还包括导向板,所述导向板设于所述抓手支架,所述导向板的导向面由两侧到中间倾斜于所述收袋孔,且向下倾斜。
20.作为优选,所述垃圾回收机器人还包括开门组件,所述开门组件设于所述机械臂的工作端,用于打开地面垃圾箱的箱门。
21.作为优选,所述开门组件包括推杆和开门弹性件,所述推杆滑动设于所述机械臂的工作端,且能在工作位置和缩回位置之间移动,所述开门弹性件设于所述机械臂的工作端和所述推杆之间,用于使所述推杆止动于所述工作位置。
22.作为优选,所述垃圾回收机器人还包括打包组件,所述打包组件能将所述待回收垃圾袋的袋口封闭。
23.作为优选,所述打包组件包括:
24.打包支架,设于所述机器人本体,所述打包支架设有第一压接件;
25.第二压接件,所述第二压接件滑动设于所述打包支架;
26.供料夹,用于储存打包钉并能自动供应打包钉;
27.打包驱动件,设于所述打包支架,所述打包驱动件的输出端和所述第二压接件传动连接,用于驱动所述第二压接件靠近或远离所述第一压接件;所述第二压接件向靠近所述第一压接件过程中能将所述打包钉挤压为闭环的扣子。
28.作为优选,所述打包组件还包括:
29.第一预收件,设于所述打包支架,所述第一预收件设有第一预收部;
30.第二预收件,所述第二预收件设有第二预收部,且滑动设于所述打包支架,所述第二压接件滑动设于所述第二预收件;
31.预收弹性件,设于所述第二预收件和所述第二压接件之间,用于驱动所述第二预收件向所述第一预收件移动;所述第二预收件靠近所述第一预收件的状态下,所述第一预收部与所述第二预收部形成的收纳槽的内径尺寸小于所述打包钉的开口尺寸。
32.作为优选,所述垃圾桶包括桶本体和桶盖,所述桶盖能盖设于所述桶本体的开口;所述垃圾回收机器人还包括开盖组件,所述开盖组件用于移动所述桶盖以打开或关闭所述桶本体。
33.作为优选,所述开盖组件包括:
34.开盖支架,设于所述机器人本体;
35.摆杆,转动设于所述开盖支架;
36.开盖驱动件,设于所述开盖支架,所述开盖驱动件的输出端与所述摆杆传动连接;
37.固定件,所述固定件设于所述摆杆的工作端,用于固定所述桶盖。
38.作为优选,所述垃圾回收机器人还包括消毒组件,所述消毒组件的喷头设于所述机械臂的工作端,用于喷出雾状消毒液。
39.另一方面,本发明提供一种垃圾回收方法,包括以下步骤:机器人本体移动至待回收垃圾袋旁边,抓手组件抓取待回收垃圾袋后,将其开口收紧;通过机械臂将待回收垃圾袋
转移至垃圾桶上方,抓手组件张开后将待回收垃圾袋丢至垃圾桶内。
40.本发明的有益效果为:
41.本发明提供一种垃圾回收机器人及垃圾回收方法,该垃圾回收机器人包括机器人本体、货架机械臂和抓手组件,其中,机器人本体能按预定路线巡航;货架可拆卸连接于机器人本体,货架上放置有垃圾桶,垃圾桶用于盛放待回收垃圾袋;机械臂设于机器人本体;抓手组件设于机械臂的工作端,用于抓取待回收垃圾袋,并将待回收垃圾袋的开口收紧。借助上述机构的设置,使得待回收垃圾袋的开口能被抓手组件收紧,并抓取该待回收垃圾袋,在机械臂的作用下,将已经收紧了开口的待回收垃圾袋移动至垃圾桶内,完成了垃圾回收的无人操作,大大提高了垃圾回收效率,降低了垃圾回收成本,且避免了工作人员被感染的可能性。
附图说明
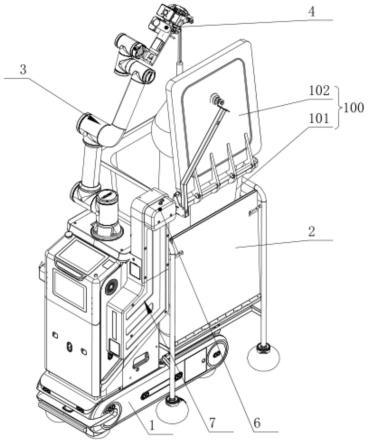
42.图1为本发明实施例中垃圾回收机器人第一视角的结构示意图;
43.图2为本发明实施例中垃圾回收机器人第二视角的结构示意图;
44.图3为本发明实施例中抓手组件的结构示意图,第一收拢件和第二收拢件分开;
45.图4为本发明实施例中抓手组件的结构示意图,第一收拢件和第二收拢件闭合;
46.图5为本发明实施例中打包组件的结构示意图;
47.图6为本发明实施例中开盖组件的结构示意图。
48.图中:
49.100、垃圾桶;101、桶本体;102、桶盖;200、待回收垃圾袋;
50.1、机器人本体;
51.2、货架;
52.3、机械臂;
53.4、抓手组件;41、抓手支架;
54.42、收拢组件;421、第一收拢件;422、第二收拢件;423、收拢驱动件;424、收袋孔;425、导向板;
55.43、抓取件;431、挂钩;432、收绳驱动件;433、转盘;434、辅绕杆;44、止挡横杆;45、旋转检测件;46、推杆;47、视觉摄像头;48、距离传感器;
56.5、打包组件;51、打包支架;511、第一压接件;52、第二压接件;53、打包驱动件;54、供料夹;55、第一预收件;56、第二预收件;57、预收弹性件;58、打包检测件;
57.6、开盖组件;61、开盖支架;62、摆杆;63、开盖驱动件;64、固定件;641、吸盘;642、真空泵;65、负压传感器;66、开盖底座;
58.7、消毒组件;71、喷头。
具体实施方式
59.下面将结合附图对本发明的技术方案进行清楚、完整地描述,显然,所描述的实施例是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
60.在本发明的描述中,需要说明的是,术语“中心”、“上”、“下”、“左”、“右”、“竖直”、“水平”、“内”、“外”等指示的方位或位置关系为基于附图所示的方位或位置关系,仅是为了便于描述本发明和简化描述,而不是指示或暗示所指的装置或元件必须具有特定的方位、以特定的方位构造和操作,因此不能理解为对本发明的限制。此外,术语“第一”、“第二”、仅用于描述目的,而不能理解为指示或暗示相对重要性。其中,术语“第一位置”和“第二位置”为两个不同的位置,而且,第一特征在第二特征“之上”、“上方”和“上面”包括第一特征在第二特征正上方和斜上方,或仅仅表示第一特征水平高度高于第二特征。第一特征在第二特征“之下”、“下方”和“下面”包括第一特征在第二特征正下方和斜下方,或仅仅表示第一特征水平高度小于第二特征。
61.在本发明的描述中,需要说明的是,除非另有明确的规定和限定,术语“安装”、“相连”、“连接”应做广义理解,例如,可以是固定连接,也可以是可拆卸连接,或一体地连接;可以是机械连接,也可以是电连接;可以是直接相连,也可以通过中间媒介间接相连,可以是两个元件内部的连通。对于本领域的普通技术人员而言,可以具体情况理解上述术语在本发明中的具体含义。
62.下面详细描述本发明的实施例,所述实施例的示例在附图中示出,其中自始至终相同或类似的标号表示相同或类似的元件或具有相同或类似功能的元件。下面通过参考附图描述的实施例是示例性的,仅用于解释本发明,而不能理解为对本发明的限制。
63.实施例一
64.如图1-6所示,本实施例提供一种垃圾回收机器人,该垃圾回收机器人包括机器人本体1、货架2、机械臂3和抓手组件4,其中,机器人本体1能在导航定位系统的指引下按照预定路线巡航,可选地,机器人本体1可以通过激光雷达进行精确导航;货架2可拆卸连接于机器人本体1,货架2上放置有垃圾桶100,垃圾桶100用于盛放待回收垃圾袋;机械臂3设于机器人本体1;抓手组件4设于机械臂3的工作端,用于抓取待回收垃圾袋200,并将待回收垃圾袋200的开口收紧。借助上述机构的设置,使得待回收垃圾袋200的开口能被抓手组件4收紧,并抓取该待回收垃圾袋200,在机械臂3的作用下,将已经收紧了开口的待回收垃圾袋200移动至垃圾桶100内,完成了垃圾回收的无人操作,大大提高了垃圾回收效率,降低了垃圾回收成本,且避免了工作人员被感染的可能性。
65.需要说明的是,机器人本体1内部设置有控制器,用于控制各部件的动作,其中,通过控制器控制各部件实现不同动作的控制原理为本领域技术人员所熟知,故在此不再赘述。
66.本实施例中,货架2的底部设有滚动轮,货架2设有围栏,围栏一侧设有开口,护板一端铰接于货架2,另一端和围栏销接,护板用于封堵围栏的开口,并和围栏形成放置槽。当需要移出垃圾桶100时,只需要将连接护板和围栏的插销抽出,护板可以向下转动,此时可以将垃圾桶100从放置槽的侧面取出。
67.其中,机器人本体1和货架2之间通过钩挂组件连接,机器人本体1可以带动货架2移动。具体地,机器人本体1上设有钩子,货架2上设有钩槽,钩子转动过程能伸入钩槽或者从钩槽抽出,当钩子伸入钩槽中时,机器人本体1能带动货架2移动。当然,在其他实施例中,可以通过其他公知的连接方式实现二者之间的对接。示例性地,可以通过吸附地形式实现对接,具体地,在机器人本体1上设置电磁铁,电磁铁通电时可以吸附货架2上的铁片。
68.关于抓手组件4的结构,本实施例中,可选地,待回收垃圾袋200包括垃圾袋本体和
抽绳,抓手组件4包括抓手支架41、收拢组件42和抓取件43,其中,抓手支架41,抓手支架41设于机械臂3的工作端;收拢组件42设于抓手支架41,用于止挡垃圾袋本体;抓取件43设于抓手支架41,用于抓取待回收垃圾袋200的抽绳并将抽绳从垃圾袋本体中抽出。借助上述设置,能实现对垃圾袋本体的收口动作。
69.关于抓取抽绳的结构,本实施例中,可选地,抓取件43包括挂钩431和收绳驱动件432,收绳驱动件432设于抓手支架41,挂钩431可移动地设于抓手支架41,且与收绳驱动件432的输出端传动连接。当然,在其他实施例中,抓取件43可以通过夹爪机构实现对抽绳的抓取。
70.具体地,抓取件43还包括转盘433和辅绕杆434,转盘433转动设于抓手支架41,且与收绳驱动件432的输出端传动连接,挂钩431包括主绕杆和设于主绕杆的一端的止挡件,止挡件和主绕杆呈夹角设置,主绕杆和辅绕杆434均设于转盘433。抓取件43通过挂钩431将抽绳勾住,然后通过转动转盘433,使得抽绳缠绕在主绕杆和辅绕杆434上,并在收拢组件42的止挡作用下,进而使得抽绳不断从垃圾袋本体中抽出来,最终使得垃圾袋本体的开口闭合。本实施例中,收绳驱动件432可以为伺服电机。通过控制转盘433转动的角度确定抽绳是否完全抽出。可选地,旋转检测件45设于抓手支架41,用于检测转盘433的转动角度。可选地,旋转检测件45为光电传感器,照片433上安装有拨片,拨片每转动一圈,可以对光电传感器遮挡一次。
71.本实施例中,可选地,止挡横杆44设置在抓手支架41上,且位于转盘433靠近止挡件的一侧,用于放置抽绳在缠绕过程中越过转盘433,使得抽绳能完全被缠绕在主绕杆和辅绕杆434上。
72.于另一实施例中,将抽绳抽出的动作可以通过抽拉的方式实现,示例性地,抓取件43滑动设于抓手支架41,在电动推杆46的作用下,抓住了抽绳的抓取件43可以远离垃圾袋本体,同样可以将垃圾袋本体内的抽绳抽出,并实现收口动作。但是考虑到空间利用率的问题,本实施例优选旋转缠绕抽绳的方案。
73.进一步地,收拢组件42包括第一收拢件421和第二收拢件422,第一收拢件421设有第一收拢口,第二收拢件422设有第二收拢口,第一收拢件421和第二收拢件422能相互靠近或远离,第一收拢件421和第二收拢件422相互靠近并闭合的状态下,能将抽绳收拢至第一收拢口和第二收拢口形成的收袋孔424内,当抽绳从垃圾袋本体中抽出预设长度时,垃圾袋本体的上部能穿过收袋孔424。垃圾袋本体的开口闭合前,无法通过收袋孔424,但是当抽绳从垃圾袋本体中抽出预设长度时,垃圾袋本体的上部能穿过收袋孔424,此时,垃圾袋本体的开口完全封闭,并为接下来的打包做好准备。
74.本实施例中,优选地,收拢组件42还包括收拢驱动件423,收拢驱动件423设于抓手支架41,第一收拢件421和第二收拢件422均转动设于抓手支架41,且分别与收拢驱动件423的两个输出端传动连接。其中,收拢驱动件423可以为电动夹爪或者夹爪气缸,第一收拢件421和第二收拢件422均设有长条孔,电动夹爪的两个输出端分别穿设于两个长条孔中。第一收拢件421和第二收拢件422在相互靠近过程中形成收袋孔424,并在收拢过程能将呈三角状的抽绳聚拢为直线状,当然,在其他实施例中,第一收拢件421和第二收拢件422可以滑动设于抓手支架41。考虑到运行过程占用的空间,本实施例优选第一收拢件421和第二收拢件422转动连接于抓手组件4的方式。
75.收袋孔424位于抓手支架41的一侧,且具有一定的距离,在第一收拢件421和第二收拢件422相互靠近的过程中,为顺利地将抽绳收拢至收袋孔424中,本实施例中,优选地,收拢组件42还包括导向板425,导向板425设于抓手支架41,导向板425的导向面由两侧到中间倾斜于收袋孔424,且向下倾斜。优选地,导向板425的两端呈弧形,且两段弧形的圆心分别为第一收拢件421和第二收拢件422的铰接点。借助上述结构的设置,在第一收拢件421和第二收拢件422相互靠近的过程中,抽绳沿着导向面一方面向收袋孔424移动,另一方面还能从垃圾袋本体中抽出部分抽绳。
76.当然,本实施例中,抓手支架41可以和机器人本体1一体成型,直接将抓手组件4的其他部件安装在机器人本体1上,下文中的各个支架均可以与机器人本体1一体成型设置,但是考虑到加工的便利性,本实施例优选抓手支架41和机器人本体1可拆卸连接的方式,优选地,二者之间可以螺接或者卡接。
77.另外,垃圾回收机器人还包括视觉摄像头47,视觉摄像头47设于抓手支架41上,用于识别指定的位置,以实现抓取件43的精确定位。进一步地,垃圾回收机器人还包括距离传感器48,距离传感器48设于抓手支架41,用于检测垃圾桶100中的垃圾是否已经装满。
78.地面垃圾箱包括地面桶、箱体和箱门,箱门的一侧铰接于箱体,另一侧通过反弹器与箱体连接,地面桶位于箱体内,待回收垃圾袋200放置地面桶内;垃圾回收机器人还包括开门组件,开门组件设于机械臂3的工作端,用于推动箱门。借助上述结构的设置,能将地面垃圾箱中的待回收垃圾袋200取出。
79.关于开门组件的结构,可选地,开门组件包括推杆46和开门弹性件,推杆46滑动设于机械臂3的工作端,且能在工作位置和缩回位置之间移动,开门弹性件设于机械臂3的工作端和推杆46之间,用于使推杆46止动于工作位置。上述结构的设置能避免机械臂3运动幅度过大时,对地面垃圾箱造成破坏。
80.为了对待回收垃圾袋200进行进一步地密封,本实施例中,可选地,垃圾回收机器人还包括打包组件5,打包组件5能将待回收垃圾袋200的袋口封闭。
81.关于打包组件5的结构,本实施例中,可选地,打包组件5包括打包支架51、第二压接件52、供料夹54和打包驱动件53,其中,打包支架51设于机器人本体1,打包支架51设有第一压接件511;第二压接件52滑动设于打包支架51;供料夹54用于储存打包钉并能自动供应打包钉;打包驱动件53设于打包支架51,打包驱动件53的输出端和第二压接件52传动连接,用于驱动第二压接件52靠近或远离第一压接件511;第二压接件52向靠近第一压接件511过程中能将打包钉挤压为闭环的扣子。其中,供料夹54的结构,可选地,供料夹54内设有料道料道的底部设有弹簧,若干打包钉并列设置且均能在料道内滑动,弹簧用于使打包钉从向料道的出口移动,其中,料道的延伸方向和第二压接件52的移动方向垂直。每弹出一个打包钉,第二压接件52在移动过程就会将该打包钉推走并和第一压接件511将打包钉弯折成闭环的扣子,此时会将垃圾袋本体的开口通过打包钉锁紧,当抽绳再回缩后,垃圾袋本体内的垃圾也无法漏出。
82.为提高锁紧的成功率,本实施例中,可选地,打包组件5还包括第一预收件55、第二预收件56和预收弹性件57,其中,第一预收件55设于打包支架51;第一预收件55设有第一预收部,第二预收件56设有第二预收部,第二预收件56滑动设于打包支架51,第二压接件52滑动设于第二预收件56;预收弹性件57设于第二预收件56和第二压接件52之间,用于驱动第
二预收件56向第一预收件55移动,第二预收件56靠近第一预收件55的状态下,第一预收部与第二预收部形成的收纳槽的内径尺寸小于打包钉的开口尺寸。本实施例中,随着第二预收件56的移动,收纳槽在形成后会逐渐做小,并在最小的状态下,收纳槽的内径尺寸小于打包钉的开口尺寸。借助第一预收件55和第二预收件56的设置使得垃圾袋本体的开口部会被再次收缩,并顺利进入打包钉的开口内。本实施例中,当收纳槽已经为最小尺寸时,第二预收件56停止运动,打包驱动件53继续动作,第二压接件52继续向第一压接件511靠近并完成打包钉的弯折以将垃圾袋本体的开口锁紧,此时,预收弹性件57被进一步压缩。本实施例中,供料夹54安装于第二预收件56,且第二预收件56设有出料口,打包钉从出料口出来后被第二压接件52推向第一压接件511进行弯折处理。其中,第一压接件511设有两个导向面,当第二压接件52将打包钉推过来后在两个导向面的作用下发生弯折,其中弯折的角度和形状与导向面的形状相关,可以根据具体要求进行设置,设置方法为本领域技术人员所熟知,故在此不再赘述。
83.关于打包驱动件53的驱动动作,可以通过丝杠螺母组件实现,其中,丝杠转动设于打包支架51,且和打包驱动件53传动连接;螺母和丝杠螺纹配合且与第二压接件52固接。
84.可选地,打包检测件58设于打包支架51,用于检测第二压接件52是否完成压接动作。具体地,第二压接件52上设有拨片,打包检测件58可以为光电传感器,设于打包支架51的一端,用于检测第二压接件52的初始位置,第二压接件52往复运动一次,拨片可以先离开打包检测件58,并最终遮挡打包检测件58。上述设置能确保第二压接件52成功往复运动一次。
85.可选地,垃圾桶100包括桶本体101和桶盖102,桶盖102能盖设于桶本体101的开口;垃圾回收机器人还包括开盖组件6,开盖组件6用于移动桶盖102以打开或关闭桶本体101。具体地,开盖组件6包括开盖支架61、摆杆62、开盖驱动件63和固定件64,固定件64设于摆杆62的工作端,用于固定桶盖102。其中,固定件64可以包括吸盘641和真空泵642,其中,开盖支架61设于机器人本体1;摆杆62转动设于开盖支架61;开盖驱动件63设于开盖支架61,开盖驱动件63的输出端与摆杆62传动连接;吸盘641设于摆杆62的工作端;真空泵642设于开盖支架61,用于为吸盘641提供负压。借助上述设置,当吸盘641吸附桶盖102后,摆杆62在开盖驱动件63的驱动下动作,将桶盖102翻开。
86.可选地,开盖底座66设于开盖支架61,开盖驱动件63设于所述开盖底座上。以上结构便于开盖驱动件63形成倾斜的姿态,以便于对摆杆62进行驱动。本实施例中,开盖驱动件63为推杆电机,推杆电机的一端铰接于开盖底座66,另一端铰接与摆杆62,推杆电机伸缩过程能带动摆杆62绕铰接点摆动。
87.进一步地,开盖组件6还包括负压传感器,负压传感器设于真空泵642和吸盘641之间,用于检测吸盘641内的负压,当检测到负压达到预设值时,开盖驱动件63才会动作。负压传感器的设置能提高桶盖102打开的成功率,提高垃圾回收效率。
88.为了对垃圾上的细菌或者病毒进行消杀,本实施例中,可选地,垃圾回收机器人还包括消毒组件7,消毒组件7的喷头71设于机械臂3的工作端,用于喷出雾状消毒液。可选地,喷头71安装在抓手支架41上。其中,消毒组件7的消毒液喷出原理类似电动喷雾器,其工作原理为本领域技术人员所熟知,故在此不再赘述。
89.实施例二
90.本实施例还提供一种垃圾回收方法,包括以下步骤:机器人本体1移动至待回收垃圾袋200旁边,抓手组件4抓取待回收垃圾袋200后,将其开口收紧;通过机械臂3将待回收垃圾袋200转移至货架2上方,抓手组件4张开后将待回收垃圾袋200丢至垃圾桶100内。
91.具体地,垃圾回收方法,包括以下步骤:
92.步骤一、机器人本体1自动对接装有垃圾桶100的货架2。
93.步骤二、机器人本体1带着货架2沿指定的路线巡航,当机器人本体1的视觉摄像头47识别到地面垃圾箱并判断需要收垃圾的时候,利用激光雷达导航精确停在地面垃圾箱旁边的指定位置。
94.步骤三、机器人本体1通过机械臂3控制手爪组件到地面垃圾箱前方并用上边的视觉摄像头47精确判定开门组件与地面垃圾箱的相对位置,然后控制开门组件打开地面垃圾箱的箱门。
95.步骤四、机器臂调整好姿态,通过勾住待回收垃圾袋200的抽绳,然后向上翘起一定角度,第一收拢件421和第二收拢件422相互靠近并闭合后形成收袋孔424,抽绳位于收袋孔424中,收绳驱动件432工作,将垃圾袋本体的进行收口。
96.步骤五、完成收口的垃圾袋本体移动到打包组件5中,通过第一预收件55和第二预收件56进一步收口后,在经过第一压接件511和第二压接件52将打包钉弯折成的闭环扣子扣在垃圾袋本体的开口,至此,打包完成。
97.步骤六、机器人本体1控制开盖组件6将垃圾桶100的桶盖102打开。
98.步骤七、机器臂带着打包好的待回收垃圾袋200运动到垃圾桶100上方并将待回收垃圾袋200丢到桶本体101中。
99.步骤八、机器臂继续控制手爪组件实现垃圾桶100内的垃圾容量检测与消毒,完成地面垃圾箱的箱门关闭后机械臂3复位,机器人本体1进行下一个地面垃圾箱的垃圾回收。
100.步骤九、当垃圾桶100中的垃圾装满后,机器人将自动前往垃圾站更换带有空垃圾桶100的货架2,并继续执行任务。
101.进一步地,在步骤七中,先将主绕杆向下倾斜,此时,主绕杆和止挡件均向下延伸,此时,抽绳能顺利从主绕杆上脱下。再进一步地,在此步骤中,完成主绕杆的倾斜动作后,先将第一收拢件421和第二收拢件422分离,使得打包的垃圾袋本体从收袋孔424中脱离,此时,在待回收垃圾袋200和内部垃圾自重作用下,在一定程度上会从主绕杆和辅绕杆434上脱离,然后再反向转动转盘433,使得抽绳完全脱离。
102.优选地,当打开地面垃圾箱的箱门后,通过消毒组件进行消毒。可选地,在垃圾桶100的桶盖102打开前和打开后均进行消毒操作。
103.显然,本发明的上述实施例仅仅是为了清楚说明本发明所作的举例,而并非是对本发明的实施方式的限定。对于所属领域的普通技术人员来说,在上述说明的基础上还可以做出其它不同形式的变化或变动。这里无需也无法对所有的实施方式予以穷举。凡在本发明的精神和原则之内所作的任何修改、等同替换和改进等,均应包含在本发明权利要求的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1