一种起重机吊臂结构的制作方法
1.本发明涉及起重机吊臂技术领域,具体为一种起重机吊臂结构。
背景技术:
2.起重机吊臂是起重机上的一个很重要的装置。起重臂是用以支持集装箱吊重,并使装卸桥具有一定的起升高度和宽度。它分为前伸臂和后伸臂,能够实现俯仰或伸缩运动。
3.起重机吊臂在使用过程中会出现转轴与外壳产生摩擦导致动能损失以及转轴损坏的情况,同时,在吊臂止动过程较为缓慢,不具有实时效应,易造成吊臂停止位置不稳定,导致货物运输位置出现偏差,不便于货物提取,故而我们提出了一种起重机吊臂结构来解决以上的问题。
技术实现要素:
4.(一)解决的技术问题
5.针对现有技术的不足,本发明提供了一种起重机吊臂结构,具备在转轴与外壳摩擦区域进行润滑处理,减少摩擦热量损失,以及吊臂实现实时停止,保证货物运输位置可控的优点,解决了起重机吊臂在使用过程中会出现转轴与外壳产生摩擦导致动能损失以及转轴损坏的情况,同时,在吊臂止动过程较为缓慢,不具有实时效应,易造成吊臂停止位置不稳定,导致货物运输位置出现偏差,不便于货物提取的问题。
6.(二)技术方案
7.为实现上述在转轴与外壳摩擦区域进行润滑处理,减少摩擦热量损失,以及吊臂实现实时停止,保证货物运输位置可控的目的,本发明提供了如下的技术方案:一种起重机吊臂结构,包括吊臂结构主体,所述吊臂结构主体的内壁开设有安置槽,所述安置槽的内部焊接有止动机构,所述吊臂结构主体的内部焊接有润滑机构。
8.优选的,所述止动机构的内部转动安装有转动板,所述转动板的顶部焊接有弹簧,所述转动板的顶部焊接有推板,所述止动机构的内壁焊接有气囊,所述气囊的外壁焊接有导气管,所述转动板的内壁焊接有支架,所述支架的内部转动安装有转盘,所述转盘的内部焊接有磁体,所述支架的底部开设有通孔,所述通孔的内部滑动连接有顶杆,所述支架的底部焊接有固定杆,所述固定杆的内部开设有滑槽,所述滑槽的内部滑动连接有滑杆,所述转动板的底部开设有通孔,所述通孔的内部转动安装有止动杆。
9.优选的,所述顶杆的顶部焊接有磁体,该磁体的磁性与转盘内部的磁体的磁性相反;所述转盘的外壁焊接有凸起圆弧块。
10.优选的,所述固定杆为铁质材料制成;所述滑杆伸入滑槽内的区域的内部焊接有磁体。
11.优选的,所述滑槽为倾斜槽,沿着滑槽的底部到顶部,滑杆不断地伸入到固定杆的内部。
12.优选的,所述润滑机构的内部转动安装有转轴,所述转轴的内部焊接有油槽,所述
转轴的外壁焊接有摩擦轮,所述转轴的内部焊接有弹性球。
13.优选的,所述油槽的内部放置有流动态的固体黄油,油槽贴近弹性球的部分为弹性材质。
14.(三)有益效果
15.与现有技术相比,本发明提供了一种起重机吊臂结构,具备以下有益效果:
16.1、该起重机吊臂结构,通过转动板内部支架中的转盘发生偏转,由于转盘的外壁焊接有凸起圆弧块,当凸起圆弧块转动到顶杆区域后,顶杆将会被推出,从而顶杆将会带动止动杆发生偏转,止动杆伸出转动板,通过止动杆限制转轴的转动,同时,利用转盘内部磁体对顶杆顶部磁体之间的吸引力以及滑槽对滑杆的限制作用,避免了止动杆伸出之后不会回到初始位置,达到了通过控制转盘的转动控制吊臂结构主体运动停止,使得吊臂结构主体运动实时停止的效果。
17.2、该起重机吊臂结构,通过转轴带动摩擦轮发生偏转,当摩擦轮与转动板接触后,带动转动板发生偏转,从而转动板将会通过推板顶住气囊收缩,使得气囊内部的气体通过导气管进入到弹性球的内部,使得弹性球膨胀撑开,膨胀的弹性球将会顶住油槽收缩,使得油槽内部流动态的固体黄油被挤压出摩擦轮,随后利用摩擦轮与转动板之间的摩擦将黄油均匀的涂抹在吊臂结构主体内部,达到了吊臂结构主体运动过程中,自动润滑吊臂结构主体的效果。
附图说明
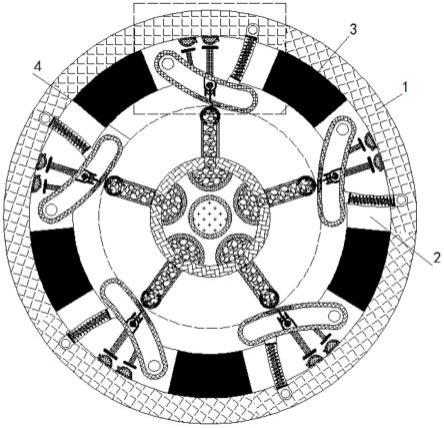
18.图1为吊臂结构主体的结构示意图;
19.图2为止动机构的结构示意图;
20.图3为止动杆运动控制装置的结构示意图;
21.图4为润滑机构的结构示意图;
22.图5为摩擦轮内部放大图的结构示意图。
23.图中:1、吊臂结构主体;2、安置槽;3、止动机构;31、转动板;32、弹簧;33、推板;34、气囊;35、导气管;36、支架;37、转盘;38、磁体;39、通孔;310、顶杆;311、固定杆;312、滑槽;313、滑杆;314、止动杆;4、润滑机构;41、转轴;42、油槽;43、摩擦轮;44、弹性球。
具体实施方式
24.下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
25.实施例一:
26.请参阅图1-3,一种起重机吊臂结构,包括吊臂结构主体1,吊臂结构主体1的内壁开设有安置槽2,安置槽2的内部焊接有止动机构3,止动机构3的内部转动安装有转动板31,转动板31的顶部焊接有弹簧32,转动板31的顶部焊接有推板33,止动机构3的内壁焊接有气囊34,气囊34的外壁焊接有导气管35,转动板31的内壁焊接有支架36,支架36的内部转动安装有转盘37,转盘37的内部焊接有磁体38,支架36的底部开设有通孔39,通孔39的内部滑动
连接有顶杆310,支架36的底部焊接有固定杆311,固定杆311的内部开设有滑槽312,滑槽312的内部滑动连接有滑杆313,转动板31的底部开设有通孔39,通孔39的内部转动安装有止动杆314。
27.通过转动板31内部支架36中的转盘37发生偏转,由于转盘37的外壁焊接有凸起圆弧块,当凸起圆弧块转动到顶杆310区域后,顶杆310将会被推出,从而顶杆310将会带动止动杆314发生偏转,止动杆314伸出转动板31,通过止动杆314限制转轴41的转动,同时,利用转盘37内部磁体38对顶杆310顶部磁体38之间的吸引力以及滑槽312对滑杆313的限制作用,避免了止动杆314伸出之后不会回到初始位置,达到了通过控制转盘37的转动控制吊臂结构主体1运动停止,使得吊臂结构主体1运动实时停止的效果。
28.实施例二:
29.请参阅图1-2和4-5,一种起重机吊臂结构,包括吊臂结构主体1,吊臂结构主体1的内壁开设有安置槽2,安置槽2的内部焊接有止动机构3,止动机构3的内部转动安装有转动板31,转动板31的顶部焊接有弹簧32,转动板31的顶部焊接有推板33,止动机构3的内壁焊接有气囊34,气囊34的外壁焊接有导气管35,转动板31的内壁焊接有支架36,支架36的内部转动安装有转盘37,转盘37的内部焊接有磁体38,支架36的底部开设有通孔39,通孔39的内部滑动连接有顶杆310,支架36的底部焊接有固定杆311,固定杆311的内部开设有滑槽312,滑槽312的内部滑动连接有滑杆313,转动板31的底部开设有通孔39,通孔39的内部转动安装有止动杆314,吊臂结构主体1的内部焊接有润滑机构4,润滑机构4的内部转动安装有转轴41,转轴41的内部焊接有油槽42,转轴41的外壁焊接有摩擦轮43,转轴41的内部焊接有弹性球44。
30.通过转轴41带动摩擦轮43发生偏转,当摩擦轮43与转动板31接触后,带动转动板31发生偏转,从而转动板31将会通过推板33顶住气囊34收缩,使得气囊34内部的气体通过导气管35进入到弹性球44的内部,使得弹性球44膨胀撑开,膨胀的弹性球44将会顶住油槽42收缩,使得油槽42内部流动态的固体黄油被挤压出摩擦轮43,随后利用摩擦轮43与转动板31之间的摩擦将黄油均匀的涂抹在吊臂结构主体1内部,达到了吊臂结构主体1运动过程中,自动润滑吊臂结构主体1的效果。
31.实施例三:
32.请参阅图1-5,一种起重机吊臂结构,包括吊臂结构主体1,吊臂结构主体1的内壁开设有安置槽2,安置槽2的内部焊接有止动机构3,吊臂结构主体1的内部焊接有润滑机构4。
33.优选的,止动机构3的内部转动安装有转动板31,转动板31的顶部焊接有弹簧32,转动板31的顶部焊接有推板33,止动机构3的内壁焊接有气囊34,气囊34的外壁焊接有导气管35,转动板31的内壁焊接有支架36,支架36的内部转动安装有转盘37,转盘37的外壁焊接有凸起圆弧块,转盘37的内部焊接有磁体38,支架36的底部开设有通孔39,通孔39的内部滑动连接有顶杆310,顶杆310的顶部焊接有磁体38,该磁体38的磁性与转盘37内部的磁体38的磁性相反,支架36的底部焊接有固定杆311,固定杆311的内部开设有滑槽312,滑槽312为倾斜槽,沿着滑槽312的底部到顶部,滑杆313不断地伸入到固定杆311的内部,滑槽312的内部滑动连接有滑杆313,固定杆311为铁质材料制成;滑杆313伸入滑槽312内的区域的内部焊接有磁体38,转动板31的底部开设有通孔39,通孔39的内部转动安装有止动杆314。
34.通过转动板31内部支架36中的转盘37发生偏转,由于转盘37的外壁焊接有凸起圆弧块,当凸起圆弧块转动到顶杆310区域后,顶杆310将会被推出,从而顶杆310将会带动止动杆314发生偏转,止动杆314伸出转动板31,通过止动杆314限制转轴41的转动,同时,利用转盘37内部磁体38对顶杆310顶部磁体38之间的吸引力以及滑槽312对滑杆313的限制作用,避免了止动杆314伸出之后不会回到初始位置,达到了通过控制转盘37的转动控制吊臂结构主体1运动停止,使得吊臂结构主体1运动实时停止的效果。
35.优选的,润滑机构4的内部转动安装有转轴41,转轴41的内部焊接有油槽42,油槽42的内部放置有流动态的固体黄油,油槽42贴近弹性球44的部分为弹性材质,转轴41的外壁焊接有摩擦轮43,转轴41的内部焊接有弹性球44。
36.通过转轴41带动摩擦轮43发生偏转,当摩擦轮43与转动板31接触后,带动转动板31发生偏转,从而转动板31将会通过推板33顶住气囊34收缩,使得气囊34内部的气体通过导气管35进入到弹性球44的内部,使得弹性球44膨胀撑开,膨胀的弹性球44将会顶住油槽42收缩,使得油槽42内部流动态的固体黄油被挤压出摩擦轮43,随后利用摩擦轮43与转动板31之间的摩擦将黄油均匀的涂抹在吊臂结构主体1内部,达到了吊臂结构主体1运动过程中,自动润滑吊臂结构主体1的效果。
37.工作原理:通过转动板31内部支架36中的转盘37发生偏转,由于转盘37的外壁焊接有凸起圆弧块,当凸起圆弧块转动到顶杆310区域后,顶杆310将会被推出,从而顶杆310将会带动止动杆314发生偏转,止动杆314伸出转动板31,通过止动杆314限制转轴41的转动,同时,利用转盘37内部磁体38对顶杆310顶部磁体38之间的吸引力以及滑槽312对滑杆313的限制作用,避免了止动杆314伸出之后不会回到初始位置,达到了通过控制转盘37的转动控制吊臂结构主体1运动停止,使得吊臂结构主体1运动实时停止的效果,通过转轴41带动摩擦轮43发生偏转,当摩擦轮43与转动板31接触后,带动转动板31发生偏转,从而转动板31将会通过推板33顶住气囊34收缩,使得气囊34内部的气体通过导气管35进入到弹性球44的内部,使得弹性球44膨胀撑开,膨胀的弹性球44将会顶住油槽42收缩,使得油槽42内部流动态的固体黄油被挤压出摩擦轮43,随后利用摩擦轮43与转动板31之间的摩擦将黄油均匀的涂抹在吊臂结构主体1内部,达到了吊臂结构主体1运动过程中,自动润滑吊臂结构主体1的效果。
38.已经示出和描述了本发明的实施例,对于本领域的普通技术人员而言,可以理解在不脱离本发明的原理和精神的情况下可以对这些实施例进行多种变化、修改、替换和变型,本发明的范围由所附权利要求及其等同物限定。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1