塔式起重机及其平衡控制方法和平衡控制系统与流程
1.本发明属于工程机械领域,具体地,涉及一种塔式起重机的平衡控制方法、塔式起重机的平衡控制系统以及塔式起重机。
背景技术:
2.在现有的塔式起重机中,平衡控制系统在起吊装置吊载重物作水平移动的过程中,通过控制移动平衡重移动,从而使得不平衡力矩保持在合理的范围内,达到平衡塔式起重机的塔身的目的,但是,平衡控制系统仅能够解决起吊装置吊载重物作水平移动的过程中的平衡问题,并不能解决塔式起重机在起吊装置吊载重物起升离地和下方着地这两个过程中塔身所受到的不平衡力矩急剧变化所带来的平衡问题。
技术实现要素:
3.针对现有技术中的上述不足或缺陷,本发明提供一种塔式起重机的平衡控制方法、塔式起重机的平衡控制系统以及塔式起重机,旨在解决塔式起重机在起吊装置吊载重物起升离地和下方着地这两个过程中塔身所受到的不平衡力矩急剧变化所带来的平衡问题。
4.为实现上述目的,本发明提供了一种塔式起重机的平衡控制方法,所述塔式起重机包括起重臂、平衡臂、起吊装置以及移动平衡重,所述移动平衡重可移动地设置于所述平衡臂上,所述起吊装置设置于所述起重臂上,所述塔式起重机还包括设置于所述起吊装置上的缓冲装置,所述缓冲装置用于延长所述起吊装置吊载重物离地过程和着地过程的时间,所述平衡控制方法包括:
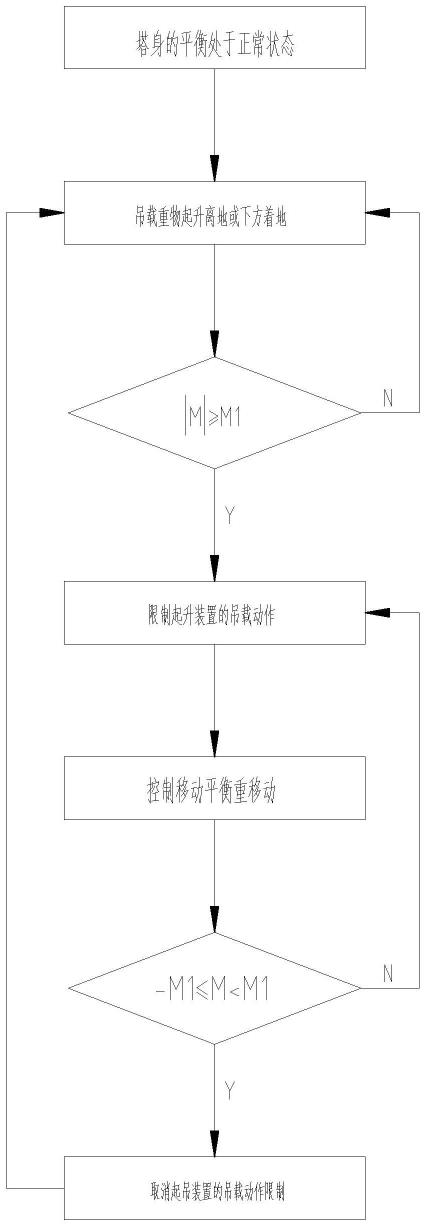
5.在所述起吊装置吊载重物起升离地或下放着地的过程中,实时获取所述塔式起重机的实时不平衡力矩m;
6.根据所述实时不平衡力矩m判断所述塔式起重机的平衡是否处于异常状态;
7.当所述塔式起重机的平衡处于异常状态时,限制所述起吊装置的吊载动作,并控制所述移动平衡重沿所述平衡臂移动,直至所述塔式起重机的平衡恢复至正常状态后静止。
8.可选地,所述根据所述实时不平衡力矩m判断所述塔式起重机的平衡是否处于异常状态,包括:
9.判断所述实时不平衡力矩m的绝对值|m|与许用不平衡力矩m1是否满足关系:|m|≥m1;若是,则所述塔式起重机的平衡处于异常状态。
10.可选地,所述当所述塔式起重机的平衡处于异常状态时,限制所述起吊装置的吊载动作,并控制所述移动平衡重沿所述平衡臂移动,直至所述塔式起重机的平衡处于正常状态后静止,包括:
11.在所述起吊装置吊载重物起升离地的过程中,当所述塔式起重机的平衡处于异常状态时,限制所述起吊装置的起升动作,并控制所述移动平衡重沿所述平衡臂朝远离所述
塔式起重机的塔身的方向移动,直至所述塔式起重机的平衡处于正常状态后静止。
12.可选地,所述当所述塔式起重机的平衡处于异常状态时,限制所述起吊装置的吊载动作,并控制所述移动平衡重沿所述平衡臂移动,直至所述塔式起重机的平衡处于正常状态后静止,包括:
13.在所述起吊装置吊载重物下放着地的过程中,当所述塔式起重机的平衡处于异常状态时,限制所述起吊装置的下放动作,并控制所述移动平衡重沿所述平衡臂朝靠近所述塔式起重机的塔身的方向移动,直至所述塔式起重机的平衡处于正常状态后静止。
14.可选地,所述控制所述移动平衡重沿所述平衡臂移动,直至所述塔式起重机的平衡恢复至正常状态后静止,包括:
15.在所述移动平衡重移动的过程中,判断所述实时不平衡力矩m与许用不平衡力矩m1是否满足关系:-m1≤m《m1;若是,则所述塔式起重机的平衡恢复至正常状态。
16.可选地,平衡控制方法还包括:
17.所述塔式起重机的平衡恢复至正常状态后,取消所述起吊装置的吊载动作的限制,控制所述起吊装置继续吊载重物起升离地或下放着地。
18.本发明还提供一种塔式起重机的平衡控制系统,所述塔式起重机包括起重臂、平衡臂、起吊装置以及移动平衡重,所述移动平衡重可移动地设置于所述平衡臂上,所述起吊装置设置于所述起重臂上,所述塔式起重机还包括设置于所述起吊装置上的缓冲装置,所述缓冲装置用于延长所述起吊装置吊载重物离地过程和着地过程的时间,所述平衡控制系统包括:
19.不平衡力矩检测模块,用于在所述起吊装置吊载重物起升离地或下放着地的过程中,实时获取所述塔式起重机的实时不平衡力矩m;和
20.控制模块,被配置为:
21.根据所述实时不平衡力矩m判断所述塔式起重机的平衡是否处于异常状态;
22.当所述塔式起重机的平衡处于异常状态时,限制所述起吊装置的吊载动作,并控制所述移动平衡重沿所述平衡臂移动,直至所述塔式起重机的平衡处于正常状态后静止。
23.可选地,所述控制模块被进一步配置为:
24.判断所述实时不平衡力矩m的绝对值|m|与许用不平衡力矩m1是否满足关系:|m|≥m1;若是,则所述塔式起重机的平衡处于异常状态。
25.可选地,所述控制模块被进一步配置为:
26.在所述起吊装置吊载重物起升离地的过程中,当所述塔式起重机的平衡处于异常状态时,限制所述起吊装置的起升动作,并控制所述移动平衡重沿所述平衡臂朝远离所述塔式起重机的塔身的方向移动,直至所述塔式起重机的平衡处于正常状态后静止。
27.可选地,所述控制模块被进一步配置为:
28.在所述起吊装置吊载重物下放着地的过程中,当所述塔式起重机的平衡处于异常状态时,限制所述起吊装置的下放动作,并控制所述移动平衡重沿所述平衡臂朝靠近所述塔式起重机的塔身的方向移动,直至所述塔式起重机的平衡处于正常状态后静止。
29.可选地,所述控制模块被进一步配置为:
30.在所述移动平衡重移动的过程中,判断所述实时不平衡力矩m与许用不平衡力矩m1是否满足关系:-m1≤m《m1;若是,则所述塔式起重机的平衡恢复至正常状态。
31.可选地,所述控制模块被进一步配置为:
32.所述塔式起重机的平衡恢复至正常状态后,取消所述起吊装置的吊载动作的限制,控制所述起吊装置继续吊载重物起升离地或下放着地。
33.本发明还提供一种塔式起重机,包括上述的平衡控制系统。
34.通过上述技术方案,在起吊装置吊载重物起升离地或下放着地的过程中,缓冲装置能够延长起吊装置吊载重物离地过程和着地过程的时间,从而避免在重物离地或着地的过程中不平衡力矩突变而导致移动平衡重的移动调节严重滞后的问题,然后,通过获取实时不平衡力矩m,以根据实时不平衡力矩m判断塔式起重机的平衡处于异常状态时,限制起吊装置的吊载动作并移动移动平衡重,使塔式起重机的平衡恢复至正常状态,如此,即可解决塔式起重机在起吊装置吊载重物起升离地和下方着地这两个过程中塔身所受到的不平衡力矩急剧变化所带来的平衡问题,使塔式起重机在重物起升离地和下方着地这两个过程中塔身保持在较好的平衡状态,保证了起吊工作的可靠性。
35.本发明的其它特征和优点将在随后的具体实施方式部分予以详细说明。
附图说明
36.附图是用来提供对本发明的进一步理解,并且构成说明书的一部分,与下面的具体实施方式一起用于解释本发明,但并不构成对本发明的限制。在附图中:
37.图1为本发明的一种实施方式中塔式起重机的平衡控制方法的流程图;
38.图2为本发明的一种实施方式中塔式起重机的结构示意图。
39.附图标记说明:
[0040]1ꢀꢀꢀꢀꢀꢀꢀꢀꢀ
起重臂
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ4ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
移动平衡重
[0041]2ꢀꢀꢀꢀꢀꢀꢀꢀꢀ
平衡臂
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ5ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
缓冲装置
[0042]3ꢀꢀꢀꢀꢀꢀꢀꢀꢀ
起吊装置
具体实施方式
[0043]
以下结合附图对本发明的具体实施方式进行详细说明。应当理解的是,此处所描述的具体实施方式仅用于说明和解释本发明,并不用于限制本发明。
[0044]
需要说明的是,在不冲突的情况下,本发明中的实施例及实施例中的特征可以相互组合。
[0045]
在本发明中,在未作相反说明的情况下,使用的方位词如“上、下、顶、底”通常是针对附图所示的方向而言的或者是针对竖直、垂直或重力方向上而言的各部件相互位置关系描述用词。
[0046]
下面将参考附图并结合实施例来详细说明本发明。
[0047]
本发明首先提供了一种塔式起重机的平衡控制方法。
[0048]
在一种实施方式中,参照附图1和附图2所示,塔式起重机包括起重臂1、平衡臂2、起吊装置3以及移动平衡重4,移动平衡重4可移动地设置于平衡臂2上,起吊装置3设置于起重臂1上,塔式起重机还包括设置于起吊装置3上的缓冲装置5,缓冲装置5用于延长起吊装置3吊载重物离地过程和着地过程的时间,平衡控制方法包括:
[0049]
在起吊装置3吊载重物起升离地或下放着地的过程中,实时获取塔式起重机的实
时不平衡力矩m;
[0050]
根据实时不平衡力矩m判断塔式起重机的平衡是否处于异常状态;
[0051]
当塔式起重机的平衡处于异常状态时,限制起吊装置3的吊载动作,并控制移动平衡重4沿平衡臂2移动,直至塔式起重机的平衡恢复至正常状态后静止。
[0052]
需要说明的是,起吊装置3吊载重物起升离地的过程即是重物从受起吊装置3的起升力而逐渐离地(此过程地面对重物还具有支撑作用)起升至完全离地的过程;起吊装置3吊载重物下放着地的过程即是将重物逐渐着地(此过程地面开始对重物具有支撑作用)下放至完全着地(此时重物完全由地面支撑)的过程。
[0053]
在本实施方式中,实时不平衡力矩m是根据移动平衡重的重量、平衡臂的自重、起重臂的自重、重物的重量以及风载荷分别实时产生的力矩计算得出,具体地,起重臂的自重、重物的重量以及风载荷分别实时产生的力矩的总和减去移动平衡重的重量和平衡臂的自重分别实时产生的力矩的总和即可得出实时不平衡力矩m。
[0054]
在本实施方式中,具体地,参照附图2所示,起吊装置3包括设置于起重臂1上的变幅小车、钢丝绳变幅机构以及吊钩,缓冲装置包括筒体、压板以及压缩弹簧,压板设置在筒体内以将筒体的内腔分隔成上下设置的上腔体和下腔体,压缩弹簧设置在下腔体内并被压板和下腔体的底壁挤压,吊钩的顶端穿过下腔体的底壁与压板固定连接,筒体的顶端通过钢丝绳与变幅小车相连,通过钢丝绳变幅机构对钢丝绳的收放可使缓冲装置和吊钩同步提升和下降,通过变幅小车可带动缓冲装置和吊钩同步水平移动,且在吊钩吊载重物离地或着地时,压缩弹簧起到缓冲的作用,能够延长吊载重物离地过程和着地过程的时间。
[0055]
可以理解地,在起吊装置3吊载重物起升离地或下放着地的过程中,缓冲装置5能够延长起吊装置3吊载重物离地过程和着地过程的时间,从而避免在重物离地或着地的过程中不平衡力矩突变而导致移动平衡重4的移动调节严重滞后的问题,然后,通过获取实时不平衡力矩m,以根据实时不平衡力矩m判断塔式起重机的平衡处于异常状态时,限制起吊装置3的吊载动作并移动移动平衡重4,使塔式起重机的平衡恢复至正常状态,如此,即可解决塔式起重机在起吊装置3吊载重物起升离地和下方着地这两个过程中塔身所受到的不平衡力矩急剧变化所带来的平衡问题,使塔式起重机在重物起升离地和下方着地这两个过程中塔身保持在较好的平衡状态,保证了起吊工作的可靠性。
[0056]
在一种实施方式中,根据实时不平衡力矩m判断塔式起重机的平衡是否处于异常状态,包括:
[0057]
判断实时不平衡力矩m的绝对值|m|与许用不平衡力矩m1是否满足关系:|m|≥m1;若是,则塔式起重机的平衡处于异常状态。
[0058]
在一种实施方式中,当塔式起重机的平衡处于异常状态时,限制起吊装置3的吊载动作,并控制移动平衡重4沿平衡臂2移动,直至塔式起重机的平衡恢复至正常状态后静止,包括:
[0059]
在起吊装置3吊载重物起升离地的过程中,当塔式起重机的平衡处于异常状态时,限制起吊装置3的起升动作,并控制移动平衡重4沿平衡臂2朝远离塔式起重机的塔身的方向移动,直至塔式起重机的平衡处于正常状态后静止。
[0060]
具体地,限制起吊装置3的起升动作即为停止起吊装置3向上提升重物或控制起吊装置3向下下放。
[0061]
可以理解地,在起吊装置3吊载重物起升离地的过程中,因重物的重量所产生的力矩逐渐增大,通过控制移动平衡重4沿平衡臂2朝远离塔式起重机的塔身的方向移动,可有效降低实时不平衡力矩m,使实时不平衡力矩m的数值大小降低至许用范围内,进而使塔式起重机的平衡保持处于正常状态。
[0062]
进一步地,可通过判断实时不平衡力矩m大于0以判断起吊装置3处于吊载重物起升离地的过程中,即当塔式起重机的平衡处于异常状态时,通过判断实时不平衡力矩m是否大于0,若是,则起吊装置3处于吊载重物起升离地的过程中。
[0063]
在一种实施方式中,当塔式起重机的平衡处于异常状态时,限制起吊装置3的吊载动作,并控制移动平衡重4沿平衡臂2移动,直至塔式起重机的平衡恢复至正常状态后静止,包括:
[0064]
在起吊装置3吊载重物下放着地的过程中,当塔式起重机的平衡处于异常状态时,限制起吊装置3的下放动作,并控制移动平衡重4沿平衡臂2朝靠近塔式起重机的塔身的方向移动,直至塔式起重机的平衡处于正常状态后静止。
[0065]
具体地,限制起吊装置3的下放动作即为停止起吊装置3向下下放重物或控制起吊装置3向上起升。
[0066]
可以理解地,在起吊装置3吊载重物下放着地的过程中,因重物的重量所产生的力矩逐渐减少,通过控制移动平衡重4沿平衡臂2朝靠近塔式起重机的塔身的方向移动,可有效降低实时不平衡力矩m,使实时不平衡力矩m的数值大小降低至许用范围内,进而使塔式起重机的平衡保持处于正常状态。
[0067]
进一步地,可通过判断实时不平衡力矩m小于0以判断起吊装置3处于吊载重物下放着地的过程中,即当塔式起重机的平衡处于异常状态时,通过判断实时不平衡力矩m是否小于0,若是,则起吊装置3处于吊载重物下放着地的过程中。
[0068]
在一种实施方式中,控制移动平衡重4沿平衡臂2移动,直至塔式起重机的平衡恢复至正常状态后静止,包括:
[0069]
在移动平衡重4移动的过程中,判断实时不平衡力矩m与许用不平衡力矩m1是否满足关系:-m1≤m《m1;若是,则塔式起重机的平衡恢复至正常状态。
[0070]
在一种实施方式中,平衡控制方法还包括:
[0071]
塔式起重机的平衡恢复至正常状态后,取消起吊装置3的吊载动作的限制,控制起吊装置3继续吊载重物起升离地或下放着地,如此设置,可使得起吊装置3吊载重物在起升离地和下放着地的过程中,塔式起重机的平衡能够保持正常状态。
[0072]
在一种实施方式中,平衡控制方法还包括:
[0073]
在起吊装置3吊载重物水平移动的过程中,实时获取实时不平衡力矩m;
[0074]
判断实时不平衡力矩m的绝对值|m|与许用不平衡力矩m1是否满足关系:|m|≥m1;若是,则塔式起重机的平衡处于异常状态;
[0075]
当塔式起重机的平衡处于异常状态时,使起吊装置3停止移动或朝绝对值|m|减少的方向移动,并控制移动平衡重4沿平衡臂2朝绝对值|m|减小的方向移动,在移动平衡重4移动的过程中,判断实时不平衡力矩m与许用不平衡力矩m1是否满足关系:-m1≤m《m1;若是,则控制移动平衡重4静止,控制起吊装置3重新按照原来的方向继续移动。
[0076]
通过这样,在起吊装置吊载重物水平移动的过程中,可使得塔式起重机的平衡保
持在正常状态,持续可靠地实现重物移动操作。
[0077]
本发明还提供了一种塔式起重机的平衡控制系统,塔式起重机包括起重臂1、平衡臂2、起吊装置3以及移动平衡重4,移动平衡重4可移动地设置于平衡臂2上,起吊装置3设置于起重臂1上,塔式起重机还包括设置于起吊装置3上的缓冲装置5,缓冲装置5用于延长起吊装置3吊载重物离地过程和着地过程的时间,平衡控制系统包括:
[0078]
不平衡力矩检测模块,用于在起吊装置3吊载重物起升离地或下放着地的过程中,实时获取塔式起重机的实时不平衡力矩m;和
[0079]
控制模块,被配置为:
[0080]
根据实时不平衡力矩m判断塔式起重机的平衡是否处于异常状态;
[0081]
当塔式起重机的平衡处于异常状态时,限制起吊装置3的吊载动作,并控制移动平衡重4沿平衡臂2移动,直至塔式起重机的平衡恢复至正常状态后静止。
[0082]
可以理解地,不平衡力矩检测模块与控制模块通信连接,当起吊装置3吊载重物起升离地或下放着地时,不平衡力矩检测模块检测并计算出塔式起重机的实时不平衡力矩m并发出至控制模块,控制模块接收实时不平衡力矩m并根据实时不平衡力矩m控制移动平衡重4的移动,使塔式起重机的平衡保持正常状态。
[0083]
在一种实施方式中,控制模块被进一步配置为:
[0084]
判断实时不平衡力矩m的绝对值|m|与许用不平衡力矩m1是否满足关系:|m|≥m1;若是,则塔式起重机的平衡处于异常状态。
[0085]
在一种实施方式中,控制模块被进一步配置为:
[0086]
在起吊装置3吊载重物起升离地的过程中,当塔式起重机的平衡处于异常状态时,限制起吊装置3的起升动作,并控制移动平衡重4沿平衡臂2朝远离塔式起重机的塔身的方向移动,直至塔式起重机的平衡处于正常状态后静止。
[0087]
在一种实施方式中,控制模块被进一步配置为:
[0088]
在起吊装置3吊载重物下放着地的过程中,当塔式起重机的平衡处于异常状态时,限制起吊装置3的下放动作,并控制移动平衡重4沿平衡臂2朝靠近塔式起重机的塔身的方向移动,直至塔式起重机的平衡处于正常状态后静止。
[0089]
在一种实施方式中,控制模块被进一步配置为:
[0090]
在移动平衡重4移动的过程中,判断实时不平衡力矩m与许用不平衡力矩m1是否满足关系:-m1≤m《m1;若是,则塔式起重机的平衡恢复至正常状态。
[0091]
在一种实施方式中,控制模块被进一步配置为:
[0092]
塔式起重机的平衡恢复至正常状态后,取消起吊装置3的吊载动作的限制,控制起吊装置3继续吊载重物起升离地或下放着地。
[0093]
本发明还提出一种塔式起重机,上述的平衡控制系统。
[0094]
以上仅为本发明的较佳实施例而已,并不用以限制本发明,凡在本发明的精神和原则之内,所作的任何修改、等同替换、改进等,均应包含在本发明的保护范围之内。
[0095]
另外需要说明的是,在上述具体实施方式中所描述的各个具体技术特征,在不矛盾的情况下,可以通过任何合适的方式进行组合,为了避免不必要的重复,本发明对各种可能的组合方式不再另行说明。
[0096]
此外,本发明的各种不同的实施方式之间也可以进行任意组合,只要其不违背本
发明的思想,其同样应当视为本发明所公开的内容。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1