一种基于无人驾驶升降机的信号收发管理系统的制作方法
1.本发明涉及信号收发管理技术领域,具体为一种基于无人驾驶升降机的信号收发管理系统。
背景技术:
2.升降机是一种多功能升降机械设备,可分为固定式、移动式、导轨式和链条式等;
3.在升降机运行之前,往往会让技术人员对升降机进行一个数据的检查,从而查看升降机是否存在安全隐患,在检查技术后再向升降机进行一个操作信号的发送,升降机依据信号进行操作,但该种操作无法在无人看管的情况下进行操作,且无法自主的依据升降机以及周边的环境进行数据分析,从而对升降机的操作信号进行判断以及管理,且耗费时间长,导致工作效率低下;
4.针对此方面的技术缺陷,现提出一种解决方案。
技术实现要素:
5.本发明的目的在于提供一种基于无人驾驶升降机的信号收发管理系统,是通过对升降机的自身升降拉力以及每次物件对升降机的作用力,进行升降机的磨损分析,从而将每次升降机运行的相关记录数据进行数值转化,从而更好的对升降次自身的磨损情况进行计算分析,增加升降机自身的安全性,节省数据分析的时间,再将升降机周边的物件动态进行影像处理,从而预测升降机周边物件的运行轨迹,避免升降机周边的物件对升降机造成影响,避免升降机运行时受到外界因素的影响,增加升降机的使用寿命。
6.本发明的目的可以通过以下技术方案实现:
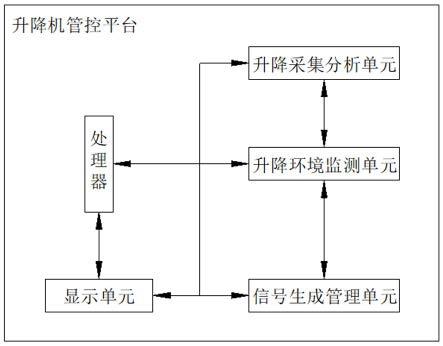
7.一种基于无人驾驶升降机的信号收发管理系统,包括升降机管控平台,且升降机管控平台内设置有处理器以及显示单元,所述升降机管控平台内还设置有升降采集分析单元、升降环境监测单元和信号生成管理单元;
8.所述处理器生成采集分析信令并传输至升降采集分析单元,通过升降采集分析单元对升降机的自身状况以及提升物件进行数据的采集,并依据采集的数据对升降机以及提升物件进行安全数值的计算,计算出接收次数、拉力差值、上升冲击值以及下降支撑力;
9.所述处理器生成环境监测信令并发送至升降环境监测单元,通过升降环境监测单元对升降机运行时周边的环境安全进行监测处理,从而判定升降机的升降安全与否,生成影响信号或无影响信号;
10.所述处理器生成管理计算信令并传输至信号生成管理单元,通过信号生成管理单元对升降机自身、提升物件以及周边环境进行一个安全的计算数值,依据安全的计算数值判定升降机运行的升降,禁止信令或执行信令;
11.所述处理器生成显示信令并传输至显示单元,通过显示单元对无人驾驶升降机的操作信号进行授权处理,显示“允许执行”或“不允许执行”。
12.进一步的,所述升降采集分析单元依据采集分析信令对升降机的自身数据与提升
物件进行结合分析,结合分析的具体分析过程为:
13.采集无人驾驶升降机运行的拉绳数据、物件数据、移动数据、拉绳数量以及接收次数;
14.提取若干个物件数据并标记为zw,w的取值为正整数,将若干个物件数据进行均值计算,计算出若干个物件数据的平均值,将若干个物件的平均值与若干个物件数据进行差值计算,计算出若干个物件差值,将若干个物件差值进行均值计算,计算出物件均差值;
15.提取若干个移动数据并标记为yw,w的取值为正整数,将若干个移动数据进行均值计算,计算出若干个移动数据的平均值,将若干个移动数据的平均值与若干个移动数据进行差值计算,计算出若干个移动差值,将若干个移动差值进行均值计算,计算出移动均差值;
16.提取拉绳数据以及拉绳数量,将拉绳数据标记为ls,将拉绳数量标记为sl,设定一个拉绳的安全系数aq,设定一个拉绳许可拉力的偏差调节因子β=0.95964,依据拉绳承重计算式:计算出拉绳的实际使用的最大拉力c
拉
;
17.将许可拉力与物件数据的平均值、物件均差值、移动数据的平均值、接收次数以及移动均差值进行升降信号处理,计算出拉力差值、上升冲击值以及下降支撑力;
18.拉绳数据表示为同一升降机若干次运行时拉绳的直径大小,物件数据表示为同一升降机若干次运行时即将进行提升或下降的物件重量,移动数据表示为若干个相同提升机运行时拉绳的收卷速度,拉绳数量表示为同一升降机若干次运行时拉伸的数量,接收次数表示为升降机以往接收到的上升信号和下降信号的次数。
19.进一步的,升降信号处理的具体处理过程为:
20.将许可拉力与物件数据的平均值以及物件均差值进行差值计算:拉力差值=许可拉力-(物件数据的平均值
±
物件均差值),计算出的拉力差值为一个范围值;
21.将物件数据的平均值以及物件均差值与移动数据的平均值以及移动均差值进行上升和下降的承重处理:
22.当上升状态下:设定一个惯性时间,将惯性时间与移动数据的平均值以及移动均差值进行惯性距离计算,计算出物件在惯性状态下向上的一个高度距离,并将其标定为高度惯性值,依据计算式:计算出物件在停止后对升降机的冲击值f1,并将其标记为上升冲击值,ez表示为物件数据的平均值,zp表示为物件均差值,h表示为高度惯性值,g表示为重力加速度;
23.当下降状态下:将物件数据的平均值以及物件均差值与移动数据的平均值以及移动均差值带入计算式:f2=(ey
±
yp)*(ez
±
zp)*u1,其中,f2表示为升降机对物件的支撑力,并将其标记为下降支撑力,ey表示为移动数据的平均值,yp表示为移动均差值,ez表示为物件数据的平均值,zp表示为物件均差值,u1表示为支撑力偏差调节因子。
24.进一步的,所述升降环境监测单元依据环境监测信令对升降机在升降物体时升降机以及周边环境进行一个影像处理操作,影像处理操作的具体操作过程为:
25.将采集的以往升降机以及物体整体的影像标定为影像数据,将影像数据进行三维成像并标记为升降影像,并进行升降机的运动轨迹标记,生成升降轨迹;
26.将采集的升降机周边的物件影像标定为环物影像,将采集的物件名称标定为物件名数据,将采集的物件的图像标定为物图数据,依据物件名数据、物图数据以及环物影像进行物件的识别,生成存在信号或不存在信号;
27.当识别到不存在信号时,则不进行物件名数据的提取,当识别到存在信号时,则进行物件名数据的提取,将环物影像按照物件名数据进行三维成像,生成升降及周边虚拟影像;
28.将升降轨迹在升降机周边虚拟影像进行标记,判定升降机周边虚拟影像对升降估计的影响,生成影响信号或无影响信号。
29.进一步的,判定升降机周边虚拟影像对升降估计的影响的具体过程为:
30.将升降轨迹在升降机周边虚拟影像进行标记,从而得到一个虚拟升降轨迹坐标,将三维成像后物件名数据对应的位置进行标记,从而得到若干个物件名称数据对应的虚拟坐标,并将其标定为若干个虚拟物件坐标,选取出其中一段时间内若干个虚拟物件坐标,将一段时间内两个不同的时间点内的同一个物件的虚拟物件坐标分别标记为坐标a1以及坐标a2,将坐标a1与坐标a2进行匹配,当两者匹配结果一致时,则判定物件的位置没有移动,生成未移动信号,当两者匹配结果不一致时,则判定物件的位置发生变化,生成移动信号;
31.对未移动信号以及移动信号进行识别,当识别到未移动信号时,再次进行一段时间内两个时间的位置识别,当识别到移动信号时,则提取坐标a1以及坐标a2,并以坐标a1为原点,向着坐标a2的方向进行直线延伸,并将延伸后的直线标定为物件移动延伸线;
32.将周边虚拟影像中标记的升降轨迹在升降与物件移动延伸线进行交际识别,具体为:将物件移动延伸线标定为若干个坐标点,并标定为移动坐标,将升降轨迹标定为若干个坐标点,并标定为轨迹坐标点,将若干个移动坐标与若干个轨迹坐标点进行匹配,当两者的匹配结果不一致时,则生成无影响信号,当两者的匹配结果一致时,则生成影响信号。
33.进一步的,所述信号生成管理单元依据管理计算信令对升降机的自身运行时的计算数值以及升降机周边的物件位置进行数据以及信号的转化计算,依据转化计算后信号对无人驾驶升降机的信号收发进行授权处理,依据转化计算后信号对无人驾驶升降机的信号收发进行授权处理的具体过程为:
34.依据损耗计算式:
35.将接收次数、拉力差值、上升冲击值以及下降支撑力进行损耗计算,计算出损耗计算值m
损
,拉力差值用l
差
表示,拉力差值对升降机损耗的权重系数用e1表示,上升冲击值用f1表示,下降支撑力用f2表示,上升冲击值对升降机损耗的权重系数用e2表示,下降支撑力对升降机损耗的权重系数用e3表示,接收次数用jc表示,升降机损耗计算的偏差调节值用δ表示;
36.提取损耗计算值m
损
,并将其与损耗阈值km进行比对,当m
损
≥km时,生成工作危险信号,当m
损
<km时,生成工作安全信号;
37.提取工作危险信号、工作安全信号、影响信号以及无影响信号,并将其与采集的无人驾驶升降机的接收的操作信号进行综合授权处理:
38.当识别到工作危险信号或影响信号中的任一信号出现时,则判定无人驾驶升降机再运行时会存在安全隐患,生成禁止信令;
39.当识别到工作安全信号和无影响信号同时出现时,则判定无人驾驶升降机在运行时不会存在安全隐患,生成执行信令。
40.进一步的,所述显示单元以及显示信令对执行信令或禁止信令进行转化显示,具体为:对执行信令或禁止信令进行识别,当识别到执行信令,则提取无人驾驶升降机的操作信号并进行显示“允许执行”,当识别到禁止信令,则显示无人驾驶升降机的操作信号并显示“不允许执行”,并发出警报声。
41.本发明的有益效果如下:
42.本发明是通过对升降机的自身升降拉力以及每次物件对升降机的作用力,进行升降机的磨损分析,从而将每次升降机运行的相关记录数据进行数值转化,从而更好的对升降次自身的磨损情况进行计算分析,增加升降机自身的安全性,节省数据分析的时间,再将升降机周边的物件动态进行影像处理,从而预测升降机周边物件的运行轨迹,避免升降机周边的物件对升降机造成影响,避免升降机运行时受到外界因素的影响,增加升降机的使用寿命。
附图说明
43.下面结合附图对本发明作进一步的说明。
44.图1是本发明的系统框图。
具体实施方式
45.下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有作出创造性劳动前提下所获得的所有其它实施例,都属于本发明保护的范围。
46.请参阅图1所示,本发明为一种基于无人驾驶升降机的信号收发管理系统,包括升降机管控平台、升降采集分析单元、升降环境监测单元、处理器、信号生成管理单元以及显示单元;
47.升降采集分析单元、升降环境监测单元、处理器、信号生成管理单元以及显示单元均设置在升降管控各平台内,且处理器分别与升降采集分析单元、升降环境监测单元、信号生成管理单元以及显示单元通信连接;
48.处理器生成采集分析信令并传输至升降采集分析单元,升降采集分析单元依据采集分析信令对升降机的自身数据与提升物件进行结合分析,结合分析的具体分析过程为:
49.将采集的同一升降机若干次运行时拉绳的直径大小标定为拉绳数据,将采集的同一升降机若干次运行时即将进行提升或下降的物件重量标定为物件数据,将采集的若干个相同提升机运行时拉绳的收卷速度标定为移动数据,将采集的同一升降机若干次运行时拉伸的数量标定为拉绳数量,将采集的升降机以往接收到的上升信号和下降信号的次数标定为接收次数,其中,接收次数知道一次上升信号和一次下降信号统计为一次接收次数,拉绳为钢丝绳;
50.提取若干个物件数据并标记为zw,w的取值为正整数,将若干个物件数据带入到计
算式:n的取值为正整数,计算出若干个物件数据的平均值,将若干个物件的平均值与若干个物件数据进行差值计算,计算出若干个物件差值,将若干个物件差值进行均值计算,计算出物件均差值;
51.提取若干个移动数据并标记为yw,w的取值为正整数,将若干个移动数据带入到计算式:n的取值为正整数,计算出若干个移动数据的平均值,将若干个移动数据的平均值与若干个移动数据进行差值计算,计算出若干个移动差值,将若干个移动差值进行均值计算,计算出移动均差值;
52.提取拉绳数据以及拉绳数量,依据拉绳承重计算式:计算出拉绳的实际使用的最大拉力c
拉
,并将其标定为许可拉力,ls表示为拉绳数据,sl表示为拉绳数量,aq表示为拉绳的安全系数,β表示为拉绳许可拉力的偏差调节因子,且β的取值为0.95964;
53.将许可拉力与物件数据的平均值、物件均差值、移动数据的平均值、接收次数以及移动均差值进行升降信号处理,具体为:
54.将许可拉力与物件数据的平均值以及物件均差值进行差值计算:拉力差值=许可拉力-(物件数据的平均值
±
物件均差值),计算出的拉力差值为一个范围值,范围值具体为:将拉力差值=许可拉力-(物件数据的平均值+物件均差值)中拉力差值的数值标定为拉力最小值,将拉力差值=许可拉力-(物件数据的平均值-物件均差值)中拉力差值的数值标定为拉力最大值;
55.将物件数据的平均值以及物件均差值与移动数据的平均值以及移动均差值进行上升和下降的承重处理:
56.当上升状态下:设定一个惯性时间,将惯性时间与移动数据的平均值以及移动均差值进行惯性距离计算,计算出物件在惯性状态下向上的一个高度距离,并将其标定为高度惯性值,依据计算式:计算出物件在停止后对升降机的冲击值f1,并将其标记为上升冲击值,ez表示为物件数据的平均值,zp表示为物件均差值,h表示为高度惯性值,g表示为重力加速度;
57.当下降状态下:将物件数据的平均值以及物件均差值与移动数据的平均值以及移动均差值带入计算式:f2=(ey
±
yp)*(ez
±
zp)*u1,其中,f2表示为升降机对物件的支撑力,并将其标记为下降支撑力,ey表示为移动数据的平均值,yp表示为移动均差值,ez表示为物件数据的平均值,zp表示为物件均差值,u1表示为支撑力偏差调节因子;
58.处理器生成环境监测信令并发送至升降环境监测单元,升降环境监测单元依据环境监测信令对升降机在升降物体时升降机以及周边环境进行一个影像处理操作,影像处理操作的具体操作过程为:
59.将采集的以往升降机以及物体整体的影像标定为影像数据,将以往升降机以及物
体整体标定的影像数据进行三维成像并标记为升降影像,将升降影像中升降机以及物体每个运动时间点的边缘进行位置标记,从而得到若干个边缘位置,将若干个边缘位置进行轨迹连接,从而形成一个升降轨迹;
60.将采集的升降机周边的物件影像标定为环物影像,将采集的物件名称标定为物件名数据,将采集的物件的图像标定为物图数据,依据物件名数据、物图数据以及环物影像进行物件的识别,具体为:将环物影像与物图数据进行匹配识别,当两者匹配成功时,则判定环物影像内存在对应的物图数据,生成存在信号,当匹配失败时,则判定环物影像内不存在对应的物图数据,生成不存在信号;
61.对存在信号以及不存在信号进行识别,当识别到不存在信号时,则不进行物件名数据的提取,当识别到存在信号时,则进行物件名数据的提取,将环物影像按照物件名数据进行三维成像,生成升降及周边虚拟影像;
62.将升降轨迹在升降机周边虚拟影像进行标记,从而得到一个虚拟升降轨迹坐标,将三维成像后物件名数据对应的位置进行标记,从而得到若干个物件名称数据对应的虚拟坐标,并将其标定为若干个虚拟物件坐标,选取出其中一段时间内若干个虚拟物件坐标,将一段时间内两个不同的时间点内的同一个物件的虚拟物件坐标分别标记为坐标a1以及坐标a2,将坐标a1与坐标a2进行匹配,当两者匹配结果一致时,则判定物件的位置没有移动,生成未移动信号,当两者匹配结果不一致时,则判定物件的位置发生变化,生成移动信号;
63.对未移动信号以及移动信号进行识别,当识别到未移动信号时,再次进行一段时间内两个时间的位置识别,当识别到移动信号时,则提取坐标a1以及坐标a2,并以坐标a1为原点,向着坐标a2的方向进行直线延伸,并将延伸后的直线标定为物件移动延伸线;
64.将周边虚拟影像中标记的升降轨迹在升降与物件移动延伸线进行交际识别,具体为:将物件移动延伸线标定为若干个坐标点,并标定为移动坐标,将升降轨迹标定为若干个坐标点,并标定为轨迹坐标点,将若干个移动坐标与若干个轨迹坐标点进行匹配,当两者的匹配结果不一致时,则生成无影响信号,当两者的匹配结果一致时,则生成影响信号;
65.对无影响信号以及影响信号进行识别,当识别到影响信号时,则自动提取物件名数据,当识别到无影响信号时,则不进行物件名数据的提取;
66.处理器生成管理计算信令并传输至信号生成管理单元,信号生成管理单元依据管理计算信令对升降机的自身运行时的计算数值以及升降机周边的物件位置进行数据以及信号的转化计算,依据转化计算后信号对无人驾驶升降机的信号收发进行授权处理,依据转化计算后信号对无人驾驶升降机的信号收发进行授权处理的具体过程为:
67.提取接收次数、拉力差值、上升冲击值以及下降支撑力,并将接收次数、拉力差值、上升冲击值以及下降支撑力带入到损耗计算式:
68.其中,m
损
表示为损耗计算值,l
差
表示为拉力差值,e1表示为拉力差值对升降机损耗的权重系数,f1表示为上升冲击值,f2表示为下降支撑力,e2表示为上升冲击值对升降机损耗的权重系数,e3表示为下降支撑力对升降机损耗的权重系数,jc表示为接收次数,δ表示为升降机损耗计算的偏差调节值,且e1、e2、e3以及δ均为预设值;
69.提取损耗计算值,并将其与损耗阈值进行比对,当损耗计算值大于等于损耗阈值
时,则判定升降机的安全性低,生成工作危险信号,当损耗计算值小于损耗阈值时,则判定升降机的安全性高,生成工作安全信号;
70.提取工作危险信号、工作安全信号、影响信号以及无影响信号,并将其与采集的无人驾驶升降机的接收的操作信号进行综合授权处理:
71.当识别到工作危险信号或影响信号中的任一信号出现时,则判定无人驾驶升降机再运行时会存在安全隐患,生成禁止信令;
72.当识别到工作安全信号和无影响信号同时出现时,则判定无人驾驶升降机在运行时不会存在安全隐患,生成执行信令;
73.处理器生成显示信令并传输至显示单元,显示单元以及显示信令对执行信令或禁止信令进行转化显示,具体为:对执行信令或禁止信令进行识别,当识别到执行信令,则提取无人驾驶升降机的操作信号并进行显示“允许执行”,当识别到禁止信令,则显示无人驾驶升降机的操作信号并显示“不允许执行”,并发出警报声。
74.以上内容仅仅是对本发明结构所作的举例和说明,所属本技术领域的技术人员对所描述的具体实施例做各种各样的修改或补充或采用类似的方式替代,只要不偏离发明的结构或者超越本权利要求书所定义的范围,均应属于本发明的保护范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1