一种管道机器人线缆自动收放线轮装置的制作方法
本发明属于电力检测,特别涉及一种管道机器人线缆自动收放线轮装置。
背景技术:
1、在当前的城市输配电系统中,地下电缆正逐渐取代架空线路成为目前城市电网输配电能的主要方式。然而,由于线缆管道处于地下,其隐蔽性、复杂性对管道铺设与后期维护带来了巨大的挑战,成为了班组电力地下资产运行维护工作的难点。现多采用管道机器人对地下线缆管道及线缆进行查验,但由于管道机器人工作环境的复杂性,需要外接线缆为其提供稳定持续的电力供应与数据传输,此外,外接线缆应具备良好的救援能力,当发生故障时,可通过外接线缆将管道机器人拖出,避免卡死在管道内。同时,为了保证外接线缆的有序收放以便多次循环使用,需要研发配套的管道机器人自动收放线轮装置,从而进一步提高机器人的易用程度并为机器人的持续长距离运行提供保障。
技术实现思路
1、为了解决上述问题,本发明提供一种管道机器人线缆自动收放线轮装置,能够保证机器人线缆的供电、信号传输与抗拉能力,实现线缆的自动收放与整理,减少线缆与管道的磨损。
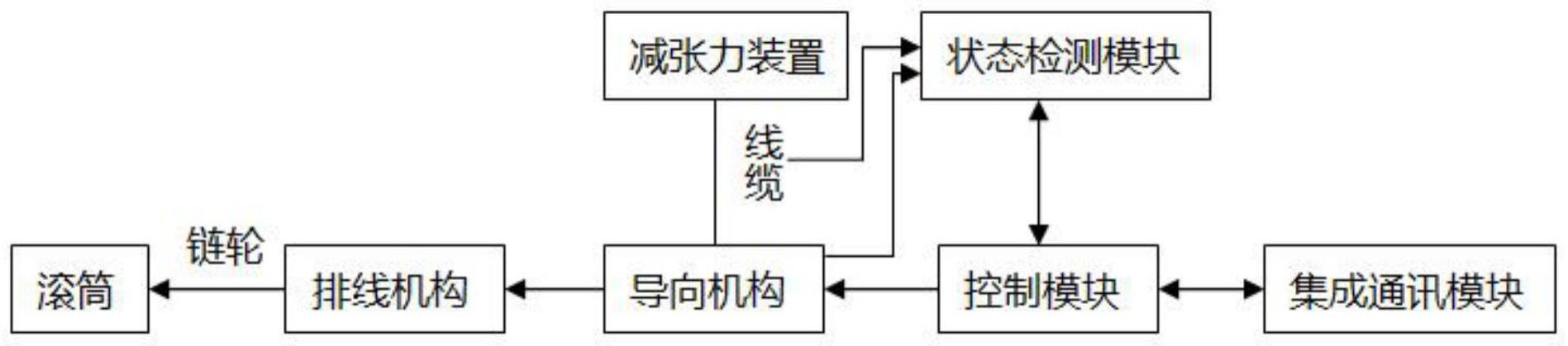
2、本发明具体为一种管道机器人线缆自动收放线轮装置,所述自动收放线轮装置包括滚筒、排线机构、减张力装置、导向机构、控制模块、状态检测模块和集成通讯模块,所述滚筒与所述排线机构通过链轮结构相连接,所述排线机构还与所述导向机构相连接,
3、所述控制模块与所述导向机构、所述状态检测模块、所述集成通讯模块相连接,所述状态检测模块还与所述滚筒、线缆、所述导向机构相连接;
4、所述自动收放线轮装置将线缆先通过所述减张力装置降低拉力,再控制所述导向机构驱动所述排线机构移动,进而将线缆缠绕在所述滚筒上。
5、所述滚筒包括左侧板、外圆环、右侧板、空心轴、密封盖、横梁和内圆环,所述左侧板与所述右侧板分别安装在所述空心轴两侧,所述左侧板与所述右侧板内侧顺序安装所述外圆环、所述内圆环,所述横梁安装在所述空心轴外侧,所述密封盖安装在所述空心轴两端。
6、所述排线机构采用双向丝杆配合所述滚筒将线缆整齐规律的排列在所述滚筒上。
7、所述减张力装置包括第一定滑轮、第二定滑轮、第三定滑轮、第一动滑轮、钢丝定滑轮、钢丝轮和发条弹簧,所述第一定滑轮改变线缆方向,继续绕过所述第二定滑轮再次改变线缆方向,将线缆引导至所述第一动滑轮,最后通过所述第三定滑轮将线缆引导至所述排线机构;所述第一动滑轮中间转动轴由钢丝绳牵引,通过所述钢丝定滑轮改变方向最终缠绕在所述钢丝轮上,所述发条弹簧安装在所述钢丝轮底部,由所述发条弹簧控制所述第一动滑轮的运动状况。
8、所述导向机构包括导向轮、减速机和电机,所述电机与所述减速机、所述导向轮顺序连接,控制所述导向轮产生运动,进而控制所述双向丝杆工作:当所述导向轮移动到所述双向丝杆的端点处能够自动转变方向,进而把线缆规则地缠绕在所述滚筒上。
9、所述状态检测模块包括力传感器、转速传感器、速度传感器、电流传感器,所述力传感器安装在所述减张力装置上,采集线缆张力;所述转速传感器安装在所述滚筒上,采集所述滚筒转速;所述速度传感器安装在所述减张力装置上,采集线缆运动速度,所述电流传感器采集所述电机驱动电流。
10、所述控制模块采用微处理器对所述自动收放线轮装置进行整体控制和分析:
11、控制所述导向机构、所述状态检测模块、所述集成通讯模块的工作状态;
12、根据所述状态检测模块采集的所述线缆张力、所述滚筒转速、所述线缆运动速度、所述电机驱动电流对所述电机的工作状态进行控制,保证线缆的供电、信号传输与抗拉能力满足实际需求。
13、与现有技术相比,有益效果是:所述自动收放线轮装置利用减张力装置控制线缆张力在规定范围,当张力大时,减张力装置降低线缆张力,同时控制导向机构的电机降低转速,进而减慢线缆缠绕在滚筒上的速度;通过排线机构和滚筒配合将线缆整齐规律的排列在滚筒上。
技术特征:
1.一种管道机器人线缆自动收放线轮装置,其特征在于,所述自动收放线轮装置包括滚筒、排线机构、减张力装置、导向机构、控制模块、状态检测模块和集成通讯模块,所述滚筒与所述排线机构通过链轮结构相连接,所述排线机构还与所述导向机构相连接,
2.根据权利要求1所述的一种管道机器人线缆自动收放线轮装置,其特征在于,所述滚筒包括左侧板、外圆环、右侧板、空心轴、密封盖、横梁和内圆环,所述左侧板与所述右侧板分别安装在所述空心轴两侧,所述左侧板与所述右侧板内侧顺序安装所述外圆环、所述内圆环,所述横梁安装在所述空心轴外侧,所述密封盖安装在所述空心轴两端。
3.根据权利要求2所述的一种管道机器人线缆自动收放线轮装置,其特征在于,所述排线机构采用双向丝杆配合所述滚筒将线缆整齐规律的排列在所述滚筒上。
4.根据权利要求3所述的一种管道机器人线缆自动收放线轮装置,其特征在于,所述减张力装置包括第一定滑轮、第二定滑轮、第三定滑轮、第一动滑轮、钢丝定滑轮、钢丝轮和发条弹簧,所述第一定滑轮改变线缆方向,继续绕过所述第二定滑轮再次改变线缆方向,将线缆引导至所述第一动滑轮,最后通过所述第三定滑轮将线缆引导至所述排线机构;所述第一动滑轮中间转动轴由钢丝绳牵引,通过所述钢丝定滑轮改变方向最终缠绕在所述钢丝轮上,所述发条弹簧安装在所述钢丝轮底部,由所述发条弹簧控制所述第一动滑轮的运动状况。
5.根据权利要求4所述的一种管道机器人线缆自动收放线轮装置,其特征在于,所述导向机构包括导向轮、减速机和电机,所述电机与所述减速机、所述导向轮顺序连接,控制所述导向轮产生运动,进而控制所述双向丝杆工作:当所述导向轮移动到所述双向丝杆的端点处能够自动转变方向,进而把线缆规则地缠绕在所述滚筒上。
6.根据权利要求5所述的一种管道机器人线缆自动收放线轮装置,其特征在于,所述状态检测模块包括力传感器、转速传感器、速度传感器、电流传感器,所述力传感器安装在所述减张力装置上,采集线缆张力;所述转速传感器安装在所述滚筒上,采集所述滚筒转速;所述速度传感器安装在所述减张力装置上,采集线缆运动速度,所述电流传感器采集所述电机驱动电流。
7.根据权利要求6所述的一种管道机器人线缆自动收放线轮装置,其特征在于,所述控制模块采用微处理器对所述自动收放线轮装置进行整体控制和分析:
技术总结
本发明提供了一种管道机器人线缆自动收放线轮装置,所述自动收放线轮装置包括滚筒、排线机构、减张力装置、导向机构、控制模块、状态检测模块和集成通讯模块;所述自动收放线轮装置将线缆先通过所述减张力装置降低拉力,再控制所述导向机构驱动所述排线机构移动,进而将线缆缠绕在所述滚筒上。本发明提供一种管道机器人线缆自动收放线轮装置,能够保证机器人线缆的供电、信号传输与抗拉能力,实现线缆的自动收放与整理,减少线缆与管道的磨损。
技术研发人员:王瀚,戴云峰,王鑫,刘安宏,冯兴明,丁亚杰,成云朋,成先文,陈文,杨帆,陈诚,骆伟伟
受保护的技术使用者:国网江苏省电力有限公司盐城供电分公司
技术研发日:
技术公布日:2024/1/12
- 还没有人留言评论。精彩留言会获得点赞!