一种爬升机械臂的机械锁装置的制作方法
1.本发明涉及爬升机械臂技术领域,具体是爬升机械臂的机械锁装置。
背景技术:
2.机械臂是指高精度,多输入多输出、高度非线性、强耦合的复杂系统,因其独特的操作灵活性,已在工业装配、安全防爆等领域得到广泛应用,在很多高层施工升降平台中,为保证高空作业的安全,大量使用机械臂来固定和支撑升降平台,因此,机械臂的受力、承力非常大,使机械臂的锁定和开锁成为一个难题。
3.目前常用的机械臂在使用时,一般需要工人对机械臂进行锁定以及对锁定的机械臂进行开锁,不但使得工人的劳动强度增加,而且还耽误了工程的施工进程,施工效率低,同时由于爬升机械臂随着建筑楼层的抬高而抬高,因此需要工人爬到高处进行操作开锁,对工人来讲具有一定挑战以及具有一定的安全隐患,同时目前的机械臂的机械锁只有单一的锁定卡合结构,一但锁定卡合结构出现异常问题,则会对机械臂整体的安全性造成极大的影响,甚至出现机械臂脱落的情况,具有极大的安全隐患。
技术实现要素:
4.本发明旨在于解决背景技术中存在的缺点,提供爬升机械臂的机械锁装置,通过卡合组件能够让设备箱与支撑板之间快速相互卡合,提高对设备箱的稳定性,以保障卡合结构出现异常问题时,有另外卡合结构来代替,以提高设备箱的稳定性。
5.为实现上述目的,本发明提供如下技术方案,一种爬升机械臂的机械锁装置,包括:支撑板,所述支撑板侧面设有机械臂本体,所述机械臂本体靠近所述支撑板的一侧设有爬升板,所述爬升板侧面设有两个设备箱;及设置于所述设备箱与所述支撑板之间的卡合组件,用于固定所述机械臂本体在当前位置。
6.进一步的,所述卡合组件包括:设于所述支撑板侧面的两个滑轨,所述滑轨表面开设有两个滑槽;设于所述设备箱内部的两个夹持板,且两个所述夹持板分别插入到两个所述滑槽内;所述滑槽内壁上开设有多个卡合槽,所述夹持板靠近所述卡合槽的一侧连接有与所述卡合槽配套使用的卡合块。
7.进一步的,所述滑槽内部设有多个卡合板,且所述卡合板的一端凸出于所述滑轨的侧面,所述卡合板靠近所述设备箱的侧面连接有插块,所述设备箱相对两侧均开设有与所述插块配套使用的插孔,所述卡合板与所述滑槽内壁之间设有复位弹簧。
8.进一步的,所述设备箱侧面开设有与所述夹持板配套使用的限位槽,所述设备箱内部连接导柱,所述夹持板上开设有与所述导柱配套使用的滑孔,所述导柱外侧套接有压缩弹簧,且所述压缩弹簧的两端分布与两块所述夹持板相连接。
9.进一步的,所述导柱侧面设有移动块,所述移动块的两端与两块所述夹持板的端部之间通过轴承转动连接有连接杆,所述移动块靠近所述导柱的一侧连接有移动板,所述移动板表面开设有与所述导柱配套使用的开槽。
10.进一步的,所述移动板远离所述移动块的一端连接有挤压块,且所述设备箱表面开设有与所述挤压块配套使用的通孔,所述滑轨靠近所述挤压块的一侧设有多个呈竖直方向均匀排列分布的顶块,且所述顶块呈梯形结构。
11.进一步的,所述设备箱远离滑轨的一侧连接有升降板,所述升降板与所述设备箱之间设有锁定组件,用于固定所述移动块的位置,以保障所述夹持板固定在当前位置,所述锁定组件包括:开设于所述升降板内部的锁定槽;连接于所述移动块一侧于所述锁定槽配套使用的锁定板,且所述锁定板表面开设有锁定孔;开设于所述升降板内与所述锁定槽相导通的收纳槽,所述收纳槽内部安装有电磁铁,所述电磁铁靠近所述锁定板的一侧设有锁定杆,所述锁定杆与所述电磁铁之间设有锁定弹簧。
12.进一步的,所述爬升板与所述升降板之间设有升降组件,用于带动所述设备箱在所述滑轨上进行爬升,所述升降组件包括:开设于所述升降板侧面的升降槽,所述升降槽内部通过轴承转动连接有两根螺纹杆;开设于所述升降板内部的设备腔,所述设备腔内部安装有与所述螺纹杆相连接的驱动电机。
13.进一步的,所述升降板表面开设有与所述螺纹杆配套使用的螺纹孔,所述螺纹杆通过所述螺纹孔与所述升降板螺纹啮合连接。
14.本发明提供了一种爬升机械臂的机械锁装置,具有以下有益效果:本发明优点在于,通过卡合组件能够让设备箱抬升到相对应的高度时,能够通过夹持板、卡合块和卡合板对滑轨进行卡合固定,使得设备箱与滑轨相互卡合连接,提高对设备箱的稳定性和安全性,以保障卡合结构出现异常问题时,有额外卡合结构来代替,以提高设备箱的稳定性。其次,通过设备箱内的锁定组件,能够让设备箱固定在当前位置,为爬升板提供爬升所需要的支撑点。接着,通过升降组件带动两个设备箱依次抬升,以保障机械臂本体的抬升时的安全性。
附图说明
15.图1为本发明的整体结构俯视剖面图。
16.图2为本发明的整体结构侧面剖面图。
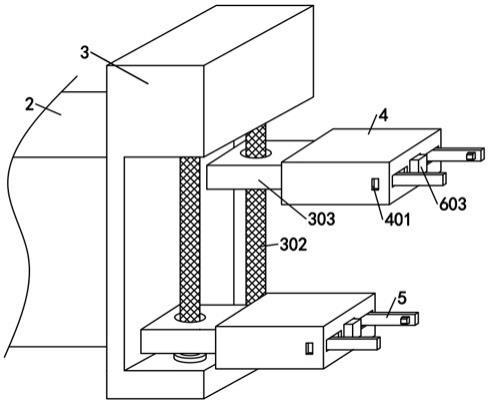
17.图3为本发明的爬升板结构示意图。
18.图4为本发明的滑轨结构示意图。
19.图5为本发明的螺纹杆结构示意图。
20.图6为本发明的设备箱结构示意图。
21.图7为本发明的卡合板结构示意图。
22.图8为本发明的设备箱结构俯视剖面图。
23.图9为本发明的滑轨结构俯视剖面图。
24.图10为本发明的卡合槽结构剖视图。
25.图11为本发明的图1中的a处放大图。
26.图12为本发明的图1中的b处放大图。
27.图1-11中:1、支撑板;101、滑轨;102、顶块;103、滑槽;104、卡合槽;105、复位弹簧;106、卡合板;107、插块;2、机械臂本体;3、爬升板;301、驱动电机;302、螺纹杆;303、升降板;304、螺纹孔;4、设备箱;401、插孔;402、限位槽;403、通孔;404、导柱;405、压缩弹簧;5、夹持
板;501、滑孔;502、卡合块;503、连接杆;6、移动块;601、移动板;602、开槽;603、挤压块;7、锁定板;701、锁定孔;702、锁定槽;703、电磁铁;704、锁定弹簧;705、锁定杆。
具体实施方式
28.本技术实施例提供一种爬升机械臂的机械锁装置,该种爬升机械臂的机械锁装置可以实现通过卡合组件能够让设备箱与支撑板之间快速相互卡合,提高对设备箱的稳定性,以保障卡合结构出现异常问题时,有另外卡合结构来代替,以提高设备箱的稳定性。以下对该爬升机械臂的机械锁装置进行详细说明。需说明的是,以下实施例的描述顺序不作为对实施例优选顺序的限定。
29.下面结合附图和具体实施方式对本技术予以详细描述。请参阅图1-12中,本实施例提供的一种爬升机械臂的机械锁装置,包括:支撑板1,支撑板1侧面设有机械臂本体2,机械臂本体2靠近支撑板1的一侧设有爬升板3,爬升板3侧面设有两个设备箱4;及设置于设备箱4与支撑板1之间的卡合组件,用于固定机械臂本体2在当前位置。
30.在本实施例中,爬升机械臂的机械锁装置主要包括支撑板1、机械臂本体2、爬升板3、设备箱4和卡合组件;其中,爬升机械臂的机械锁装置通过卡合组件能够让设备箱4抬升到相对应的高度时,能够通过夹持板5、卡合块502和卡合板106与滑轨101进行卡合固定,使得设备箱4与滑轨101相互卡合连接,提高对设备箱4的稳定性和安全性,以保障卡合结构出现异常问题时,有额外卡合结构来代替,以提高设备箱4的稳定性。其次,通过设备箱4内的锁定组件,能够让设备箱4固定在当前位置,为爬升板3提供爬升所需要的支撑点。接着,通过升降组件带动两个设备箱4依次抬升,以保障机械臂本体2的抬升时的安全性在一些实施例中,卡合组件包括:设于支撑板1侧面的两个滑轨101,滑轨101表面开设有两个滑槽103;设于设备箱4内部的两个夹持板5,且两个夹持板5分别插入到两个滑槽103内;滑槽103内壁上开设有多个卡合槽104,夹持板5靠近卡合槽104的一侧连接有与卡合槽104配套使用的卡合块502。
31.设备箱4在爬升的过程中,挤压块603与顶块102接触并被顶入到设备箱4内部,使得挤压块603通过移动板601带动移动块6移动,进而让移动块6带动连接杆503的一端移动,使得连接杆503的另一端带动夹持板5向挤压块603方向移动,而由于顶块102与卡合槽104处于同一水平线上,使得夹持板5上的卡合块502插入到卡合槽104内,使得设备箱4通过卡合块502和卡合槽104与滑轨101卡合连接。
32.在一些实施例中,滑槽103内部设有多个卡合板106,且卡合板106的一端凸出于滑轨101的侧面,卡合板106靠近设备箱4的侧面连接有插块107,设备箱4相对两侧均开设有与插块107配套使用的插孔401,卡合板106与滑槽103内壁之间设有复位弹簧105。
33.而夹持板5在向挤压块603移动的过程中带动卡合板106移动,使得卡合板106向挤压块603方向移动,进而让插块107刚好插入到插孔401内,使得设备箱4与滑轨101二次卡合连接,提高设备箱4的稳定性和安全性,避免单一卡合结构出现异常问题时,无法保障设备箱4的稳定性,导致设备箱4与滑轨101松动甚至脱落,具有一定的安全隐患。
34.在一些实施例中,设备箱4侧面开设有与夹持板5配套使用的限位槽402,设备箱4内部连接导柱404,夹持板5上开设有与导柱404配套使用的滑孔501,导柱404外侧套接有压
缩弹簧405,且压缩弹簧405的两端分布与两块夹持板5相连接。
35.通过限位槽402对夹持板5的移动距离进行限定,而通过导柱404和滑孔501以及限位槽402对夹持板5的移动方向进行限定,然后两块夹持板5向挤压块603方向移动时会挤压压缩弹簧405,使得压缩弹簧405发生弹性变形产生弹力,并将产生的弹力作用于夹持板5上,待设备箱4带动挤压块603与顶块102分离后,两块夹持板5在压缩弹簧405弹力的作用下回弹到原位,使得夹持板5通过连接杆503带动移动块6、移动板601和挤压块603退回原位,使得挤压块603紧靠滑轨101侧面。
36.然后夹持板5带动卡合块502与卡合槽104分离,同时卡合板106在复位弹簧105弹力的作用下回弹,使插块107与插孔401分离,完成设备箱4与滑轨101分离。
37.在一些实施例中,导柱404侧面设有移动块6,移动块6的两端与两块夹持板5的端部之间通过轴承转动连接有连接杆503,移动块6靠近导柱404的一侧连接有移动板601,移动板601表面开设有与导柱404配套使用的开槽602,通过开槽602的设置能够使移动板601在移动过程中不会对导柱404造成影响。
38.在一些实施例中,移动板601远离移动块6的一端连接有挤压块603,且设备箱4表面开设有与挤压块603配套使用的通孔403,滑轨101靠近挤压块603的一侧设有多个呈竖直方向均匀排列分布的顶块102,且顶块102呈梯形结构。
39.设备箱4在抬升下降的过程中带动挤压块603进行移动,使得挤压块603与顶块102的倾斜面接触,并被顶块102挤入到设备箱4内,通过多个顶块102的设置能够满足设备箱4所需停留高度的位置。
40.在一些实施例中,设备箱4远离滑轨101的一侧连接有升降板303,升降板303与设备箱4之间设有锁定组件,用于固定移动块6的位置,以保障夹持板5固定在当前位置,锁定组件包括:开设于升降板303内部的锁定槽702;连接于移动块6一侧于锁定槽702配套使用的锁定板7,且锁定板7表面开设有锁定孔701;开设于升降板303内与锁定槽702相导通的收纳槽,收纳槽内部安装有电磁铁703,电磁铁703靠近锁定板7的一侧设有锁定杆705,锁定杆705与电磁铁703之间设有锁定弹簧704,锁定杆705为金属材料制成。
41.待设备箱4停到某个顶块102相对应的高度位置时,移动块6向远离滑轨101方向移动,使得移动块6上的锁定板7插入到锁定槽702内,此时锁定孔701与锁定杆705的位置相对应,而需要将设备箱4固定在当前位置时,停止对电磁铁703通电,让锁定杆705在锁定弹簧704弹力的作用下插入到锁定孔701内,将移动块6锁定在当前位置,进而让设备箱4通过夹持板5和卡合块502固定在当前位置,由于设备箱4的位置固定,使得螺纹杆302在转动的过程中是螺纹杆302在进行移动。
42.在一些实施例中,爬升板3与升降板303之间设有升降组件,用于带动设备箱4在滑轨101上进行爬升,升降组件包括:开设于升降板303侧面的升降槽,升降槽内部通过轴承转动连接有两根螺纹杆302;开设于升降板303内部的设备腔,设备腔内部安装有与螺纹杆302相连接的驱动电机301。
43.需要对机械臂本体2抬升或下降时,对其中一个设备箱4内的电磁铁703通电,使得锁定杆705在磁力的作用下与锁定孔701分离,以便于螺纹杆302带动设备箱4进行移动,然后通过驱动电机301带动螺纹杆302转动,使得螺纹杆302通过螺纹孔304和升降板303带动设备箱4进行移动,然后通过锁定组件将移动后的设备箱4固定在滑轨101上,为爬升板3提
供支撑力,然后对另一个设备箱4内电磁铁703通电,使得锁定杆705在磁力的作用下与锁定孔701分离,然后在通过驱动电机301带动螺纹杆302旋转,带动设备箱4抬起或下降,此时两个设备箱4抬起到同一水平线上,然后通过锁定组件让两个设备箱4与滑轨101固定,此时在驱动螺纹杆302转动时,由于设备箱4的位置固定,使得螺纹杆302在转动的过程中是螺纹杆302在进行移动,进而让爬升板3带动机械臂本体2整体抬升或下降,重复以上步骤,以实现机械臂本体2的爬升和下降。
44.在一些实施例中,升降板303表面开设有与螺纹杆302配套使用的螺纹孔304,螺纹杆302通过螺纹孔304与升降板303螺纹啮合连接。
45.在上述实施例中,对各个实施例的描述都各有侧重,某个实施例中没有详述的部分,可以参见其他实施例的相关描述。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1