一种自动化测量设备的制作方法
1.本发明涉及自动化设备技术领域,尤其涉及一种自动化测量设备。
背景技术:
2.当一个产品需要进行上表面平面度、下表面平面度测量时,用传统的测量仪,上述数据需要分别测量,即先测量产品上表面的平面度,然后人工把产品翻面再进行产品下表面的平面度测量。对于上述测量方式而言,其存在测量效率低的缺陷,且由于人工动作的介入还会对测量精度造成影响。
3.另外,在利用测量仪对产品尺寸进行测量的过程中,现有技术普遍采用人工上件的方式,即测量人员通过手工方式将待测量产品放置于测量仪的工作台上;对于上述人工上件方式的测量仪而言,其存在自动化程度低、工作效率低的缺陷。
技术实现要素:
4.本发明的目的在于针对现有技术的不足而提供一种自动化测量设备,该自动化测量设备结构设计新颖、自动化程度高、工作效率高。
5.为达到上述目的,本发明通过以下技术方案来实现。
6.一种自动化测量设备,包括有机架,机架装设有两个左右间隔布置的自动供料组件,两个自动供料组件之间装设有抓取移送组件,抓取移送组件的后端侧装设有自动测量组件,自动测量组件与其中一个自动供料组件之间装设有二次定位平台;自动供料组件包括有料仓装夹机构、装设于机架的料仓升降驱动机构、用于从上至下依次间隔层叠放置产品的层叠式料仓,料仓升降驱动机构与料仓装夹机构驱动连接,层叠式料仓装设于料仓装夹机构;抓取移送组件包括有装设于机架且前后水平动作的移送驱动机构,移送驱动机构的驱动端装设有伺服旋转平台,伺服旋转平台的驱动端装设有呈水平横向布置的水平活动架,水平活动架装设有左侧抓取机构、位于左侧抓取机构旁侧的右侧抓取机构。
7.其中,所述左侧抓取机构、所述右侧抓取机构分别包括有装设于所述水平活动架的抓取平移驱动模组,各抓取平移驱动模组的驱动端分别装设有抓取升降驱动模组,各抓取升降驱动模组的驱动端分别装设有呈水平横向布置的取料吸板;抓取平移驱动模组包括有分别装设于水平活动架且左右间隔布置的主动同步带轮、从动同步带轮,主动同步带轮与从动同步带轮之间绕装有传动同步带;抓取平移驱动模组还包括有抓取平移活动架,抓取平移活动架与传动同步带连接;水平活动架对应主动同步带装设有抓取平移驱动电机,抓取平移驱动电机的动力输出轴与主动同步带轮驱动连接;抓取升降驱动模组包括有抓取升降活动架、螺装于所述抓取平移活动架的抓取升降驱动电机,所述取料吸板装设于抓取升降活动架,抓取升降驱动电机的动力输出轴装设有抓取升降驱动凸轮;抓取升降活动架装设有位于抓取升降驱动凸轮上端侧的抓取升降压
轮,抓取升降压轮与抓取升降驱动凸轮的凸轮面滚动接触。
8.其中,所述移送驱动机构包括有螺装于所述机架的移送驱动电机,移送驱动电机的动力输出轴通过联轴器连设有沿着前后方向水平延伸的移送驱动丝杆,移送驱动丝杆的前端部、后端部分别通过轴承座安装于机架;移送驱动机构还包括有移送驱动活动架,所述伺服旋转平台装设于移送驱动活动架,移送驱动活动架对应移送驱动丝杆螺装有移送驱动螺母,移送驱动丝杆与移送驱动螺母相配合。
9.其中,所述料仓升降驱动机构包括有装设于所述机架的料仓升降驱动安装座,料仓升降驱动安装座螺装有料仓升降驱动电机,料仓升降驱动电机的动力输出轴通过联轴器连设有呈竖向布置的料仓升降驱动丝杆,料仓升降驱动丝杆的上端部、下端部分别通过轴承座安装于料仓升降驱动安装座;料仓升降驱动机构还包括有料仓升降活动架,所述料仓装夹机构装设于料仓升降活动架,料仓升降活动架螺装有料仓升降驱动螺母,料仓升降驱动螺母与料仓升降驱动丝杆相配合。
10.其中,所述料仓装夹机构包括有螺装于所述料仓升降活动架且呈水平横向布置的料仓承托板,料仓承托板的上表面设置有料仓放置区域,料仓承托板的上表面于料仓放置区域的周侧装设有料仓定位挡块,所述层叠式料仓放置于料仓承托板的料仓放置区域,且层叠式料仓限位于料仓定位挡块的内侧;料仓装夹机构还包括有装设于料仓升降活动架的装夹安装座,装夹安装座的上端部通过枢轴铰装有装夹活动摆臂,装夹活动摆臂的一端部装设有料仓压块;装夹活动摆臂配装有摆臂驱动气缸,摆臂驱动气缸的缸体通过枢轴铰装于装夹安装座,摆臂驱动气缸的活塞杆外延端部通过枢轴与装夹活动摆臂的另一端部铰接。
11.其中,所述层叠式料仓包括有料仓顶板、位于料仓顶板下方的料仓底板,料仓顶板、料仓底板分别呈水平横向布置,料仓顶板与料仓底板之间装设有两个正对间隔布置的料仓侧板,各料仓侧板分别呈竖向布置,各料仓侧板的上端部分别与料仓顶板螺接,各料仓侧板的下端部分别与料仓底板螺接;所述装夹活动摆臂位于料仓顶板的上端侧,料仓底板搭放于所述料仓承托板的料仓放置区域且料仓底板限位于所述料仓定位挡块的内侧;各料仓侧板分别开设有若干从上至下依次间隔布置且分别朝内侧开口的侧板卡槽,两个料仓侧板的侧板卡槽对齐布置;其中一个料仓侧板的内表面开设有竖向延伸的锁杆安装槽,锁杆安装槽内嵌装有呈竖向布置的活动锁杆,活动锁杆开设有若干从上至下依次间隔布置的锁杆卡槽;锁杆安装槽的底部装设有呈竖向布置的压缩弹簧,压缩弹簧的上端部与活动锁杆的下端部抵接;活动锁杆的上端部装设有外露于料仓顶板的锁杆驱动块;所述料仓升降活动架装设有开锁气缸安装座,开锁气缸安装座装设有开锁驱动气缸,开锁驱动气缸的活塞杆外延端部装设有开锁压臂;当开锁驱动气缸驱动开锁压臂朝下抵压锁杆驱动块时,活动锁杆的锁杆开槽与料仓侧板的侧板卡槽对齐;当开锁压臂退离锁杆驱动块时,压缩弹簧处于伸展状态且活动锁杆的锁杆卡槽与料仓侧板的侧板卡槽错位。
12.其中,所述二次定位平台包括有装设于所述机架的二次定位安装架,二次定位安装架的上端部装设有定位承托台,定位承托台的旁侧装设有两个呈垂直布置的挡杆安装
块,各挡块安装块的上端部分别装设有固定挡杆;二次定位安装架的上端部还装设有位于定位承托台旁侧的定位活动架,定位活动架装设有活动挡杆;定位活动架与二次定位安装架之间装设有用于促使定位活动架朝定位承托台侧移动的拉伸弹簧,拉伸弹簧的一端部与定位活动架连接,拉伸弹簧的另一端部与二次定位安装架连接;二次定位安装架于定位活动架的旁侧装设有二次定位驱动气缸,二次定位驱动气缸的活塞杆外延端部装设有活动架推块;当二次定位驱动气缸的活塞杆伸出动作时,活动架推块顶推定位活动架朝背离定位承托台侧移动,此时拉伸弹簧被拉伸;当二次定位驱动气缸的活塞杆回缩动作时,拉伸弹簧拉动定位活动架朝定位承托台侧移动。
13.其中,所述自动测量组件包括有装设于所述机架的xy移动平台,xy移动平台的驱动端装设有活动安装架,活动安装架装设有测量传感器组件;测量传感器组件包括有分别装设于活动安装架的下固定支架、上活动支架,上活动支架位于下固定支架的上端侧,上活动支架的前端部装设有上激光位移传感器,下固定支架的前端部装设有下激光位移传感器;活动安装架对应上活动支架装设有高度调节机构,高度调节机构与上活动支架驱动连接;自动测量组件还包括有装设于机架的产品承托定位组件。
14.其中,所述产品承托定位组件包括有呈水平横向布置的产品放置板,产品放置板位于所述上激光位移传感器与所述下激光位移传感器之间;产品放置板的上表面设置有产品放置区域,且产品放置区域呈镂空结构,产品放置板的上表面于产品放置区域的周侧装设有产品定位机构;产品定位机构包括有螺装于产品放置板上表面且位于产品放置区域后端的后端定位板;产品放置板的左端部螺装有左侧气缸座,左侧气缸座螺装有左右水平动作的左侧驱动气缸,左侧驱动气缸的活塞杆外延端部装设有左侧定位板;产品放置板的右端部螺装有右侧气缸座,右侧气缸座螺装有左右水平动作的右侧驱动气缸,右侧驱动气缸的活塞杆外延端部装设有右侧定位板。
15.其中,所述高度调节机构包括有设置于所述活动安装架的电机支座、设置于所述上活动支架的调节驱动块,电机支座螺装有步进电机,步进电机的动力输出轴连设有呈竖向布置的驱动螺杆;调节驱动块对应驱动螺杆开设有上下完全贯穿的螺纹孔,驱动螺杆螺装于调节驱动块的螺纹孔内;所述活动安装架装设有呈竖向布置的光栅尺,所述上活动支架对应光栅尺装设有光栅读数头。
16.本发明的有益效果为:本发明所述的一种自动化测量设备,其机架装设有两个左右间隔布置的自动供料组件,两个自动供料组件之间装设有抓取移送组件,抓取移送组件的后端侧装设有自动测量组件,自动测量组件与其中一个自动供料组件之间装设有二次定位平台;自动供料组件包括有料仓装夹机构、装设于机架的料仓升降驱动机构、用于从上至下依次间隔层叠放置产品的层叠式料仓,料仓升降驱动机构与料仓装夹机构驱动连接,层叠式料仓装设于料仓装夹机构;抓取移送组件包括有装设于机架且前后水平动作的移送驱动机构,移送驱动机构的驱动端装设有伺服旋转平台,伺服旋转平台的驱动端装设有呈水
平横向布置的水平活动架,水平活动架装设有左侧抓取机构、位于左侧抓取机构旁侧的右侧抓取机构。通过上述结构设计,本发明能够自动且高效地实现产品测量作业,即本发明具有结构设计新颖、自动化程度高、工作效率高的优点。
附图说明
17.下面利用附图来对本发明进行进一步的说明,但是附图中的实施例不构成对本发明的任何限制。
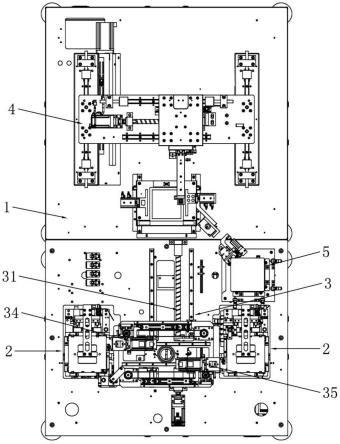
18.图1为本发明的结构示意图。
19.图2为本发明另一视角的结构示意图。
20.图3为本发明的局部结构示意图。
21.图4为本发明另一视角的局部结构示意图。
22.图5为本发明又一视角的局部结构示意图。
23.图6为本发明的抓取升降驱动模组的结构示意图。
24.图7为本发明的抓取升降驱动模组另一视角的结构示意图。
25.图8为本发明的抓取升降驱动模组的剖面示意图。
26.图9为本发明的自动供料组件的结构示意图。
27.图10为本发明的自动供料组件另一视角的结构示意图。
28.图11为本发明的自动供料组件的剖面示意图。
29.图12为本发明的自动供料组件另一位置的剖面示意图。
30.图13为本发明的二次定位平台的结构示意图。
31.图14为本发明的二次定位平台另一视角的结构示意图。
32.图15为本发明的二次定位平台的局部放大示意图。
33.图16为本发明的自动测量组件的结构示意图。
34.图17为本发明的自动测量组件的局部结构示意图。
35.图18为本发明的高度调节机构的结构示意图。
36.在图1至图18中包括有:1——机架
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
2——自动供料组件21——料仓装夹机构
ꢀꢀꢀꢀꢀꢀꢀꢀ
211——料仓承托板212——料仓定位挡块
ꢀꢀꢀꢀꢀꢀꢀ
213——装夹安装座214——装夹活动摆臂
ꢀꢀꢀꢀꢀꢀꢀ
215——料仓压块216——摆臂驱动气缸
ꢀꢀꢀꢀꢀꢀꢀ
22——料仓升降驱动机构221——料仓升降驱动安装座 222——料仓升降驱动电机223——料仓升降驱动丝杆
ꢀꢀꢀ
224——料仓升降活动架225——料仓升降驱动螺母
ꢀꢀꢀ
23——层叠式料仓231——料仓顶板
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
232——料仓底板233——料仓侧板
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
2331——侧板卡槽2332——锁杆安装槽
ꢀꢀꢀꢀꢀꢀꢀꢀ
234——活动锁杆2341——锁杆卡槽
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
235——压缩弹簧236——锁杆驱动块
ꢀꢀꢀꢀꢀꢀꢀꢀꢀ
237——开锁气缸安装座
238——开锁驱动气缸
ꢀꢀꢀꢀꢀꢀꢀ
239——开锁压臂3——抓取移送组件
ꢀꢀꢀꢀꢀꢀꢀꢀꢀ
31——移送驱动机构311——移送驱动电机
ꢀꢀꢀꢀꢀꢀꢀ
312——移送驱动丝杆313——移送驱动活动架
ꢀꢀꢀꢀꢀ
314——移送驱动螺母32——伺服旋转平台
ꢀꢀꢀꢀꢀꢀꢀꢀ
33——水平活动架34——左侧抓取机构
ꢀꢀꢀꢀꢀꢀꢀꢀ
35——右侧抓取机构36——抓取平移驱动模组
ꢀꢀꢀꢀ
361——主动同步带轮362——从动同步带轮
ꢀꢀꢀꢀꢀꢀꢀ
363——传动同步带364——抓取平移活动架
ꢀꢀꢀꢀꢀ
365——抓取平移驱动电机37——抓取升降驱动模组
ꢀꢀꢀꢀ
371——抓取升降活动架372——抓取升降驱动电机
ꢀꢀꢀ
373——抓取升降驱动凸轮374——抓取升降压轮
ꢀꢀꢀꢀꢀꢀꢀ
38——取料吸板4——自动测量组件
ꢀꢀꢀꢀꢀꢀꢀꢀꢀ
41——xy移动平台42——活动安装架
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
43——测量传感器组件431——下固定支架
ꢀꢀꢀꢀꢀꢀꢀꢀꢀ
432——上活动支架433——上激光位移传感器
ꢀꢀꢀ
434——下激光位移传感器44——高度调节机构
ꢀꢀꢀꢀꢀꢀꢀꢀ
441——电机支座442——调节驱动块
ꢀꢀꢀꢀꢀꢀꢀꢀꢀ
4421——螺纹孔443——步进电机
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
444——驱动螺杆45——产品承托定位组件
ꢀꢀꢀꢀ
451——产品放置板452——后端定位板
ꢀꢀꢀꢀꢀꢀꢀꢀꢀ
4531——左侧气缸座4532——左侧驱动气缸
ꢀꢀꢀꢀꢀꢀ
4533——左侧定位板4541——右侧气缸座
ꢀꢀꢀꢀꢀꢀꢀꢀ
4542——右侧驱动气缸4543——右侧定位板
ꢀꢀꢀꢀꢀꢀꢀꢀ
5——二次定位平台51——二次定位安装架
ꢀꢀꢀꢀꢀꢀ
52——定位承托台53——挡杆安装块
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
54——固定挡杆55——定位活动架
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
56——活动挡杆57——拉伸弹簧
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
58——二次定位驱动气缸59——活动架推块。
具体实施方式
37.下面结合具体的实施方式来对本发明进行说明。
38.如图1和图2所示,一种自动化测量设备,包括有机架1,机架1装设有两个左右间隔布置的自动供料组件2,两个自动供料组件2之间装设有抓取移送组件3,抓取移送组件3的后端侧装设有自动测量组件4,自动测量组件4与其中一个自动供料组件2之间装设有二次定位平台5。
39.进一步的,如图9至图12所示,自动供料组件2包括有料仓装夹机构21、装设于机架1的料仓升降驱动机构22、用于从上至下依次间隔层叠放置产品的层叠式料仓23,料仓升降驱动机构22与料仓装夹机构21驱动连接,层叠式料仓23装设于料仓装夹机构21。
40.更进一步的,如图3至图5所示,抓取移送组件3包括有装设于机架1且前后水平动作的移送驱动机构31,移送驱动机构31的驱动端装设有伺服旋转平台32,伺服旋转平台32的驱动端装设有呈水平横向布置的水平活动架33,水平活动架33装设有左侧抓取机构34、位于左侧抓取机构34旁侧的右侧抓取机构35。
41.对于本发明的自动供料组件2而言,在实现待测量产品自动供料的过程中,待测量产品从上至下依次间隔层叠放置于层叠式料仓23,层叠式料仓23放置于料仓装夹机构21且层叠式料仓23通过料仓装夹机构21进行装夹固定;在将待测量产品依次供给至左侧抓取机构34或者右侧抓取机构35的抓取位置时,料仓升降驱动机构22驱动料仓装夹机构21间歇性地朝上移动,进而使得层叠式料仓23间歇性地朝上移动,以实现层叠放置于层叠式料仓23上的待检测产品依次上移至左侧抓取机构34或者右侧抓取机构35的抓取位置。
42.在本发明工作过程中,各自动供料组件2分别将待测量产品供给至抓取位置,左侧抓取机构34从左侧的自动供料组件2处抓取待测量产品,右侧抓取机构35从右侧的自动供料组件2处抓取待测量产品;待被测产品被抓取后,移送驱动机构31动作并驱动伺服旋转平台32、水平活动架33、左侧抓取机构34、右侧抓取机构35以及被抓取的待测量产品朝后移动;当被测量产品移送至二次定位平台5位置时,伺服旋转平台32动作并使得被测量产品旋转移送至二次定位平台5位置,并将被测量产品被放置于二次定位平台5,以通过二次定位平台5对待测量产品进行二次校正工位;待二次定位品台对被测量产品进行二次校正工位后,左侧抓取机构34或者右侧抓取机构35从二次定位平台5上将被测量产品取下,而后伺服旋转平台32再次动作并将被测量产品移送至自动测量组件4位置,自动测量组件4对产品进行自动测量。
43.综合上述情况可知,通过上述结构设计,本发明能够自动且高效地实现产品测量作业,即本发明具有结构设计新颖、自动化程度高、工作效率高的优点。
44.作为优选的实施方式,如图3至图8所示,左侧抓取机构34、右侧抓取机构35分别包括有装设于水平活动架33的抓取平移驱动模组36,各抓取平移驱动模组36的驱动端分别装设有抓取升降驱动模组37,各抓取升降驱动模组37的驱动端分别装设有呈水平横向布置的取料吸板38。
45.具体的,抓取平移驱动模组36包括有分别装设于水平活动架33且左右间隔布置的主动同步带轮361、从动同步带轮362,主动同步带轮361与从动同步带轮362之间绕装有传动同步带363;抓取平移驱动模组36还包括有抓取平移活动架364,抓取平移活动架364与传动同步带363连接;水平活动架33对应主动同步带装设有抓取平移驱动电机365,抓取平移驱动电机365的动力输出轴与主动同步带轮361驱动连接。
46.另外,抓取升降驱动模组37包括有抓取升降活动架371、螺装于抓取平移活动架364的抓取升降驱动电机372,取料吸板38装设于抓取升降活动架371,抓取升降驱动电机372的动力输出轴装设有抓取升降驱动凸轮373;抓取升降活动架371装设有位于抓取升降驱动凸轮373上端侧的抓取升降压轮374,抓取升降压轮374与抓取升降驱动凸轮373的凸轮面滚动接触。
47.工作时,对于本发明的抓取平移驱动模组36而言,抓取平移驱动电机365通过由主动同步带轮361、从动同步带轮362、传动同步带363所组成的同步带传动机构驱动抓取平移活动架364水平移动,水平移动的抓取平移活动架364带动抓取升降驱动模组37水平移动,
进而使得取料吸板38水平移动。
48.对于本发明的抓取升降驱动模组37而言,抓取升降驱动电机372驱动抓取升降驱动凸轮373转动,由于抓取升降压轮374保持与抓取升降驱动凸轮373的凸轮面滚动接触,在抓取升降驱动凸轮373转动的过程中,抓取升降驱动凸轮373驱动抓取升降压轮374上下升降移动,抓取升降压轮374带动抓取升降活动架371、取料吸板38上下升降移动。
49.在本发明的左侧抓取机构34或者右侧抓取机构35从相应的自动供料组件2处抓取待测量产品的过程中,移送驱动机构31、伺服旋转平台32动作并使得取料吸板38对准供给至抓取位置的产品,而后抓取平移驱动模组驱动取料吸板38水平移动至层叠式料仓23内,且取料吸板38伸入至待抓取产品的下方;而后抓取升降驱动模组37驱动取料吸板38上移并使得取料吸板38吸附抓取产品;待取料吸板38吸附抓取产品后,抓取偏移驱动模组再次动作并使得取料吸板38携带产品从层叠式料仓23移出,以完成产品抓取动作。
50.作为优选的实施方式,如图3至图5所示,移送驱动机构31包括有螺装于机架1的移送驱动电机311,移送驱动电机311的动力输出轴通过联轴器连设有沿着前后方向水平延伸的移送驱动丝杆312,移送驱动丝杆312的前端部、后端部分别通过轴承座安装于机架1。
51.移送驱动机构31还包括有移送驱动活动架313,伺服旋转平台32装设于移送驱动活动架313,移送驱动活动架313对应移送驱动丝杆312螺装有移送驱动螺母314,移送驱动丝杆312与移送驱动螺母314相配合。
52.在移送驱动机构31驱动被抓取产品从前往后移送的过程中,移送驱动电机311通过由移送驱动丝杆312、移送驱动螺母314所组成的丝杆传动机构驱动移送驱动活动架313朝后移动,在此过程中,移送驱动活动架313带着伺服旋转平台32、水平活动架33、左侧抓取机构34、右侧抓取机构35以及被抓取的产品同步朝后移动。
53.作为优选的实施方式,如图9至图12所示,料仓升降驱动机构22包括有装设于机架1的料仓升降驱动安装座221,料仓升降驱动安装座221螺装有料仓升降驱动电机222,料仓升降驱动电机222的动力输出轴通过联轴器连设有呈竖向布置的料仓升降驱动丝杆223,料仓升降驱动丝杆223的上端部、下端部分别通过轴承座安装于料仓升降驱动安装座221。
54.其中,料仓升降驱动机构22还包括有料仓升降活动架224,料仓装夹机构21装设于料仓升降活动架224,料仓升降活动架224螺装有料仓升降驱动螺母225,料仓升降驱动螺母225与料仓升降驱动丝杆223相配合。
55.在本发明的自动供料组件2将待测量产品供给至抓取位置的过程中,料仓升降驱动电机222动作,且料仓升降驱动电机222通过由料仓升降驱动丝杆223、料仓升降驱动螺母225所组成的丝杆传动机构驱动料仓升降活动架224间歇性地朝上移动,在此过程中,料仓升降活动架224带动层叠式料仓23同步间歇性地朝上移动,以使得层叠布置的产品依次被供给至抓取位置。
56.作为优选的实施方式,如图9至图12所示,料仓装夹机构21包括有螺装于料仓升降活动架224且呈水平横向布置的料仓承托板211,料仓承托板211的上表面设置有料仓放置区域,料仓承托板211的上表面于料仓放置区域的周侧装设有料仓定位挡块212,层叠式料仓23放置于料仓承托板211的料仓放置区域,且层叠式料仓23限位于料仓定位挡块212的内侧。
57.其中,料仓装夹机构21还包括有装设于料仓升降活动架224的装夹安装座213,装
夹安装座213的上端部通过枢轴铰装有装夹活动摆臂214,装夹活动摆臂214的一端部装设有料仓压块215;装夹活动摆臂214配装有摆臂驱动气缸216,摆臂驱动气缸216的缸体通过枢轴铰装于装夹安装座213,摆臂驱动气缸216的活塞杆外延端部通过枢轴与装夹活动摆臂214的另一端部铰接。
58.在本发明的自动供料组件2实现产品自动供给的过程中,装载有层叠布置产品的层叠式料仓23放置于料仓层托板的料仓放置区域,在此过程中,料仓定位挡块212对层叠式料仓23进行定位,以保证层叠式料仓23准确地定位于料仓承托板211的料仓放置区域;待层叠式料仓23定位放置于料仓承托板211的料仓放置区域后,摆臂驱动气缸216动作且摆臂驱动气缸216的活塞杆外延端部驱动装夹活动摆臂214以枢轴为支点进行摆动,在此过程中,安装于装夹活动摆臂214端部的料仓压块215朝下摆动并朝下抵压层叠式料仓23,以实现层叠式料仓23装夹固定。
59.作为优选的实施方式,如图9至图12所示,层叠式料仓23包括有料仓顶板231、位于料仓顶板231下方的料仓底板232,料仓顶板231、料仓底板232分别呈水平横向布置,料仓顶板231与料仓底板232之间装设有两个正对间隔布置的料仓侧板233,各料仓侧板233分别呈竖向布置,各料仓侧板233的上端部分别与料仓顶板231螺接,各料仓侧板233的下端部分别与料仓底板232螺接;装夹活动摆臂214位于料仓顶板231的上端侧,料仓底板232搭放于料仓承托板211的料仓放置区域且料仓底板232限位于料仓定位挡块212的内侧。
60.其中,各料仓侧板233分别开设有若干从上至下依次间隔布置且分别朝内侧开口的侧板卡槽2331,两个料仓侧板233的侧板卡槽2331对齐布置。
61.另外,其中一个料仓侧板233的内表面开设有竖向延伸的锁杆安装槽2332,锁杆安装槽2332内嵌装有呈竖向布置的活动锁杆234,活动锁杆234开设有若干从上至下依次间隔布置的锁杆卡槽2341;锁杆安装槽2332的底部装设有呈竖向布置的压缩弹簧235,压缩弹簧235的上端部与活动锁杆234的下端部抵接;活动锁杆234的上端部装设有外露于料仓顶板231的锁杆驱动块236。
62.还有就是,料仓升降活动架224装设有开锁气缸安装座237,开锁气缸安装座237装设有开锁驱动气缸238,开锁驱动气缸238的活塞杆外延端部装设有开锁压臂239;当开锁驱动气缸238驱动开锁压臂239朝下抵压锁杆驱动块236时,活动锁杆234的锁杆开槽与料仓侧板233的侧板卡槽2331对齐;当开锁压臂239退离锁杆驱动块236时,压缩弹簧235处于伸展状态且活动锁杆234的锁杆卡槽2341与料仓侧板233的侧板卡槽2331错位。
63.在本发明的层叠式料仓23层叠装载产品的过程中,产品位于两个料仓侧板233之间,且产品的两个边缘部分别插入至相应侧料仓侧板233的侧板卡槽2331内,即层叠式料仓23通过料仓侧板233的侧板卡槽2331来对产品进行定位并保证所装载的产品从上至下依次层叠间隔布置。在层叠式料仓23搬移过程中,压缩弹簧235处于伸展状态并使得活动锁杆234的锁杆卡槽2341与料仓侧板233的侧板卡槽2331错位,以保证放置于层叠式料仓23内的产品不会从层叠式料仓23内滑脱掉落。
64.在层叠式料仓23定位放置于料仓承托板211的料仓放置区域后,开锁驱动气缸238驱动开锁压臂239朝下抵压锁杆驱动块236,活动锁杆234的锁杆开槽与料仓侧板233的侧板卡槽2331对齐,以方便产品能够被相应的左侧抓取机构34或者右侧抓取机构35抓取移出。
65.作为优选的实施方式,如图13至图15所示,二次定位平台5包括有装设于机架1的
二次定位安装架51,二次定位安装架51的上端部装设有定位承托台52,定位承托台52的旁侧装设有两个呈垂直布置的挡杆安装块53,各挡块安装块的上端部分别装设有固定挡杆54。
66.其中,二次定位安装架51的上端部还装设有位于定位承托台52旁侧的定位活动架55,定位活动架55装设有活动挡杆56;定位活动架55与二次定位安装架51之间装设有用于促使定位活动架55朝定位承托台52侧移动的拉伸弹簧57,拉伸弹簧57的一端部与定位活动架55连接,拉伸弹簧57的另一端部与二次定位安装架51连接。
67.另外,二次定位安装架51于定位活动架55的旁侧装设有二次定位驱动气缸58,二次定位驱动气缸58的活塞杆外延端部装设有活动架推块59;当二次定位驱动气缸58的活塞杆伸出动作时,活动架推块59顶推定位活动架55朝背离定位承托台52侧移动,此时拉伸弹簧57被拉伸;当二次定位驱动气缸58的活塞杆回缩动作时,拉伸弹簧57拉动定位活动架55朝定位承托台52侧移动。
68.在本发明的二次定位平台5对被测量产品进行二次校正工位时,取料吸板38先将产品放置于定位承托台52上,在此之前,二次定位驱动气缸58的活塞杆伸出动作,活动架推块59顶推定位活动架55朝背离定位承托台52侧移动以使得定位活动架55偏离定位承托台52,此时拉伸弹簧57被拉伸;待产品放置于定位承托台52上后,二次定位驱动气缸58动作且二次定位驱动气缸58的活塞杆进行回缩动作,在此过程中,拉伸弹簧57拉动定位活动架55朝定位承托台52侧移动,以使得安装于定位活动架55上的活动挡杆56顶推产品的边缘,并最终通过活动挡杆56、固定挡杆54相配合来实现产品二次校正工位,以保证产品能够准确地放入至自动测量组件4位置。
69.需强调的是,本发明不是通过气缸来直接驱动定位活动架55,而是通过拉伸弹簧57来拉动定位活动架55朝定位承托台52侧移动,该结构设计依靠弹簧力校正产品,以避免直接用气缸顶而造成产品被顶坏。
70.作为优选的实施方式,如图1、图2、图16、图17以及图18所示,自动测量组件4包括有装设于机架1的xy移动平台41,xy移动平台41的驱动端装设有活动安装架42,活动安装架42装设有测量传感器组件43。
71.其中,测量传感器组件43包括有分别装设于活动安装架42的下固定支架431、上活动支架432,上活动支架432位于下固定支架431的上端侧,上活动支架432的前端部装设有上激光位移传感器433,下固定支架431的前端部装设有下激光位移传感器434;活动安装架42对应上活动支架432装设有高度调节机构44,高度调节机构44与上活动支架432驱动连接。
72.另外,自动测量组件4还包括有装设于机架1的产品承托定位组件45。
73.在利用本发明的自动测量组件4对产品进行平面度测量的过程中,产品通过抓取移动组件3而被移送至产品承托定位组件45,产品承托定位组件45对产品进行定位;待产品承托定位组件45对产品定位完毕后,xy移动平台41驱动活动安装架42沿着x轴方向、y轴方向水平移动,在此过程中,安装于上活动支架432的上激光位移传感器433、安装于下固定支架431的下激光位移传感器434分别沿着活动安装架42同步水平移动,上激光位移传感器433获取产品上表面的若干测量点的位移信号并将信号反馈至控制器,下激光位移传感器434获取产品下表面的若干测量点的位移信号并将信号反馈至控制器,控制器对上激光位
移传感器433所获取的若干测量点位移信号进行分析处理以获得产品上表面的平面度值,控制器对下激光位移传感器434所获取的若干测量点位移信号进行分析处理以获得产品下表面的平面度值,即本发明通过一次定位即可实现产品上表面平面度、下表面平面度测量,测量效率高。
74.需进一步指出的是,本发明的上活动支架432通过高度调节机构44进行驱动,即高度调节机构44用于调节上活动支架432的高度,进而用于调节上激光位移传感器433的高度位置;工作时,本发明可以根据不同厚度产品来适应性调节上激光位移传感器433的高度位置,以达到适应不同厚度产品测量需求,适应性强。
75.作为优选的实施方式,如图17所示,产品承托定位组件45包括有呈水平横向布置的产品放置板451,产品放置板451位于上激光位移传感器433与下激光位移传感器434之间。
76.其中,产品放置板451的上表面设置有产品放置区域,且产品放置区域呈镂空结构,产品放置板451的上表面于产品放置区域的周侧装设有产品定位机构。
77.另外,产品定位机构包括有螺装于产品放置板451上表面且位于产品放置区域后端的后端定位板452;产品放置板451的左端部螺装有左侧气缸座4531,左侧气缸座4531螺装有左右水平动作的左侧驱动气缸4532,左侧驱动气缸4532的活塞杆外延端部装设有左侧定位板4533;产品放置板451的右端部螺装有右侧气缸座4541,右侧气缸座4541螺装有左右水平动作的右侧驱动气缸4542,右侧驱动气缸4542的活塞杆外延端部装设有右侧定位板4543。
78.在通过产品承托定位组件45对产品进行放置定位的过程中,产品放置于产品放置板451的产品放置区域,且产品的后端边缘部抵靠于后端定位板452,以通过后端定位板452来对产品进行后端边缘定位;而后左侧驱动气缸4532、右侧驱动气缸4542动作,左侧驱动气缸4532驱动左侧定位板4533朝右侧移动,右侧驱动气缸4542驱动右侧定位板4543朝左侧移动,左侧定位板4533、右侧定位板4543靠拢并分别抵靠于产品相应的左端边缘、右端边缘,以通过左侧定位板4533对产品的左端边缘进行定位,以及通过右侧定位板4543对产品的右端边缘进行定位。
79.作为优选的实施方式,如图16至图18所示,高度调节机构44包括有设置于活动安装架42的电机支座441、设置于上活动支架432的调节驱动块442,电机支座441螺装有步进电机443,步进电机443的动力输出轴连设有呈竖向布置的驱动螺杆444。
80.其中,调节驱动块442对应驱动螺杆444开设有上下完全贯穿的螺纹孔4421,驱动螺杆444螺装于调节驱动块442的螺纹孔4421内。
81.另外,活动安装架42装设有呈竖向布置的光栅尺,上活动支架432对应光栅尺装设有光栅读数头。
82.在本发明的高度调节机构44驱动上活动支架432上下移动以实现上激光位移传感器433高度位置调节的过程中,步进电机443动作且步进电机443驱动驱动螺杆444转动,由于驱动螺杆444与调节驱动块442的螺纹孔4421相螺接,即转动的驱动螺杆444驱动调节驱动块442上下移动,上下移动的调节驱动块442带动上活动支架432、上激光位移传感器433同步上下移动。
83.在步进电机443动作并驱动上活动支架432上下移动的过程中,上活动支架432会
带动光栅读数头同步升降移动,光栅读数头读取光栅尺上的位置信息并实时将位置信息反馈至测量仪控制器,测量仪控制根据上述位置信息再次控制步进电机443的旋转角度,从而形成闭环控制,以达到上激光位移传感器433高度准确控制的目的。
84.以上内容仅为本发明的较佳实施例,对于本领域的普通技术人员,依据本发明的思想,在具体实施方式及应用范围上均会有改变之处,本说明书内容不应理解为对本发明的限制。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1