矿用发动机驱动履带式双驾驶室单元支架搬运机器人的制作方法
1.本发明属于井下运输设备的技术领域,具体公开了一种矿用发动机驱动履带式双驾驶室单元支架搬运机器人。
背景技术:
2.在沿空留巷支护方案中柔模支护技术是目前比较广泛应用的支护方式一,其本质是在进行沿空留巷时,利用柔模支护技术在巷道采空区一侧形成一个具有较好密封性和稳定性的柔模墙,防止采空区瓦斯涌入巷道,保证矿井的通风要求和留巷的围岩稳定性,进而确保矿井安全,提高煤炭回采率。
3.单元支架因其强度较高,避免了单体支柱因冲击地压而易折断伤人的弊端,同时,与常规超前支架相比,单元支架没有反复支撑顶板的弊病,每次对顶板只支护一次,对防止顶板破碎具有优势,能有效防护柔模墙。单元支架在沿空巷道的应用中,最关键的技术保证单元支架的快速移架。但目前单元支架搬运通常采用绞车牵引的方式,操作复杂、效率低且存在安全隐患。因此,单元支架搬运的问题成为了限制单元支架在沿空留巷工艺上推广的关键因素。
4.同时,在狭窄的巷道或煤矿顺槽内进行运输作业时,单向运输设备无法调头或者需要很大的转弯场地才能调头,可操作性差、安全性低、运输效率低。
技术实现要素:
5.本发明提供一种矿用发动机驱动履带式双驾驶室单元支架搬运机器人,解决以下技术问题:
6.1、单元支架搬运采用绞车牵引,操作复杂、效率低且存在安全隐患;
7.2、在狭窄的巷道或煤矿顺槽内进行运输作业时,单向运输设备无法调头或者需要很大的转弯场地才能调头,可操作性差、安全性低、运输效率低。
8.上述一种矿用发动机驱动履带式双驾驶室单元支架搬运机器人,包括搬运机构、主机架、前驾驶室、后驾驶室、液压系统、发动机总成和履带底盘总成;搬运机构、前驾驶室、后驾驶室、液压系统和发动机总成均布置在主机架上,履带底盘总成布置在主机架的两侧;前驾驶室和后驾驶室分别位于主机架的前后两侧,用于进行双向驾驶;液压系统由发动机总成提供动力;搬运机构和履带底盘总成由液压系统提供动力;搬运机构包括后架、中间架、中间架翻转驱动部、前架、前架翻转驱动部、支架铲板和铲板翻转驱动部;后架安装在主机架的前端;中间架上设置有两组竖向相对的铰接点,两组铰接点分别与后架和前架铰接;中间架由中间架翻转驱动部驱动,绕中间架与后架的铰接点左右翻转,最小翻转角度为0,最大翻转角度为90
°
;前架由前架翻转驱动部驱动,绕中间架与前架的铰接点左右翻转,最小翻转角度为0,最大翻转角度为90
°
;支架铲板铰接在前架的前侧,由铲板翻转驱动部驱动上下翻转,最小翻转角度为0,最大翻转角度为90
°
。
9.进一步地,后架的底部设置有伸缩支腿,伸缩支腿由支腿伸缩部驱动向下伸出支
撑在地面上或向上收缩处于悬空状态。
10.进一步地,中间架与后架通过铰耳和铰轴连接,前架与中间架通过铰耳和铰轴连接,支架铲板与前架通过铰耳和铰轴连接。
11.进一步地,中间架翻转驱动部、前架翻转驱动部、铲板翻转驱动部和支腿伸缩部均为油缸。
12.进一步地,中间架与后架的顶部设置有避让槽,避让槽上安装有油缸安装耳ⅰ,中间架翻转油缸的两端分别与两个油缸安装耳ⅰ铰接;前架的中部设置有避让孔,避让孔的顶部和中间架的前侧设置有油缸安装耳ⅱ,前架翻转油缸的两端分别与两个油缸安装耳ⅱ铰接;避让孔的底部和支架铲板上设置有油缸安装耳ⅲ,铲板翻转油缸的两端分别与两个油缸安装耳ⅲ铰接。
13.进一步地,上述矿用发动机驱动履带式双驾驶室单元支架搬运机器人,还包括乳化液系统,乳化液系统用于为单元支架补液以及接受单元支架的回液,包括乳化液箱、乳化液泵站和操作阀;乳化液箱和乳化液泵站均布置在主机架上,乳化液箱和乳化液泵站通过乳化液管连接,乳化液泵站由发动机总成驱动;操作阀用于控制乳化液泵站。
14.进一步地,液压系统包括液压油箱、液压泵、多路阀和先导操作手柄;履带底盘总成中的驱动件为液压马达;液压泵与发动机总成连接,用于将液压油箱中的液压油泵送至多路阀;多路阀通过先导操作手柄进行进出油换向,将液压油分别送至中间架翻转油缸、前架翻转油缸、铲板翻转油缸、支腿伸缩油缸和液压马达中。
15.进一步地,主机架上还设置有用于一键启停及手动遥控自动切换的电控系统,电控系统包括电控箱、仪表显示器和报警器,报警器具有人员接近报警功能;前驾驶室和后驾驶室中均设置有座椅,前驾驶室和后驾驶室中均布置有先导操作手柄和仪表显示器。
16.进一步地,主机架包括前主机架、后主机架和配重块;前主机架与后主机架通过螺栓连接,配重块布置在后主机架下方;履带底盘总成、乳化液系统、前驾驶室、液压油箱、多路阀、电控箱、报警器布置在前主机架上,后驾驶室、液压泵和发动机总成布置在后主机架上,发动机总成采用柴油发动机。
17.本发明具有如下有益效果:
18.1、上述矿用发动机驱动履带式双驾驶室单元支架搬运机器人具备中间架和前架左右翻转、支架铲板上下翻转的功能,可快速对单元支架进行叉装,解决了现有技术中单元支架搬运采用绞车牵引,操作复杂、效率低且存在安全隐患的技术问题;
19.2、搬运机构的整体结构简单,当支架铲板、前架、中间架完全收拢时体积小;
20.3、可实现双向行驶,在狭窄的巷道或煤矿顺槽内不需要掉头,不需要另外建设转弯场地,操作简便,可操作性强,车辆安全性高,运输效率高;
21.4、在后架的底部设置支腿,对单元支架进行叉装时,支腿伸出支撑在地面上,保证叉装过程的稳定性,行驶时,支腿可收起远离地面;
22.5、可以为单元支架补充乳化液,且具有手动遥控切换、人员接近报警等功能,能够有效提高单元支架搬运效率、降低劳动强度,达到自动化减员增效的目的,对推广单元支架在煤矿井下的应用具有良好的社会效益。
附图说明
23.为了更清楚地说明本发明具体实施方式或现有技术中的技术方案,下面将对具体实施方式或现有技术描述中所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图是本发明的一些实施方式,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据这些附图获得其他的附图。
24.图1为矿用发动机驱动履带式双驾驶室单元支架搬运机器人的主视图;
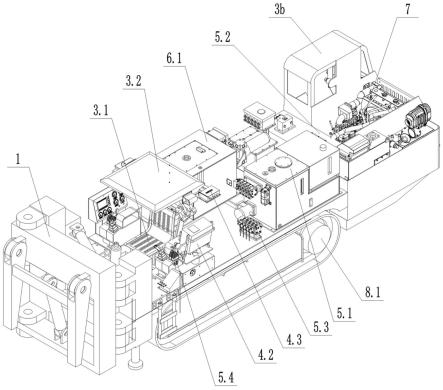
25.图2为图1的轴视图;
26.图3为搬运机构向右翻转的示意图;
27.图4为搬运机构向左翻转的示意图;
28.图5为主机架的结构示意图。
29.图中:1-搬运机构;1.1-后架;1.2-中间架;1.3-前架;1.4-支架铲板;1.5-中间架翻转油缸;1.6-前架翻转油缸;1.7-铲板翻转油缸;1.8-伸缩支腿;
30.2-主机架;2.1-前主机架;2.2-后主机架;2.3-配重块;
31.3a-前驾驶室;3b-后驾驶室;3.1-座椅;3.2-座椅挡板;
32.4.1-电控箱;4.2-仪表显示器;4.3-报警器;
33.5.1-液压油箱;5.2-液压泵;5.3-多路阀;5.4-先导操作手柄;
34.6.1-乳化液箱;6.2-乳化液泵站;6.3-操作阀;
35.7-发动机总成;
36.8-履带底盘总成;8.1-液压马达。
具体实施方式
37.下面将结合附图对本发明的技术方案进行清楚、完整地描述,显然,所描述的实施例是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
38.实施例1
39.本实施例提供一种矿用发动机驱动履带式双驾驶室单元支架搬运机器人,包括搬运机构1、主机架2、前驾驶室3a、后驾驶室3b、电控系统、液压系统、乳化液系统、发动机总成7、履带底盘总成8。
40.搬运机构1包括后架1.1、中间架1.2、中间架翻转驱动部、前架1.3、前架翻转驱动部、支架铲板1.4和铲板翻转驱动部;后架1.1安装在主机架2的前端;中间架1.2上设置有两组竖向相对的铰接点,两组铰接点分别与后架1.1和前架1.3铰接;中间架1.2由中间架翻转驱动部驱动,绕中间架1.2与后架1.1的铰接点左右翻转;前架1.3由前架翻转驱动部驱动,绕中间架1.2与前架1.3的铰接点左右翻转;支架铲板1.4铰接在前架1.3的前侧,由铲板翻转驱动部驱动上下翻转。中间架1.2、前架1.3和支架铲板1.4的翻转角度均为0-90
°
,翻转角度均为0时,中间架1.2叠放于后架1.1的前侧,前架1.3叠放于中间架1.2的前侧,支架铲板1.4叠放于前架1.3的前侧。
41.进一步地,中间架1.2与后架1.1通过铰耳和铰轴连接,前架1.3与中间架1.2通过铰耳和铰轴连接,支架铲板1.4与前架1.3通过铰耳和铰轴连接。
42.进一步地,中间架翻转驱动部、前架翻转驱动部和铲板翻转驱动部均为油缸。通过
油缸收缩实现中间架1.2、前架1.3和支架铲板1.4的翻转。
43.进一步地,中间架1.2与后架1.1的顶部设置有避让槽,避让槽上安装有油缸安装耳ⅰ,中间架翻转油缸1.5的两端分别与两个油缸安装耳ⅰ铰接;前架1.3的中部设置有避让孔,避让孔的顶部和中间架1.2的前侧设置有油缸安装耳ⅱ,前架翻转油缸1.6的两端分别与两个油缸安装耳ⅱ铰接;避让孔的底部和支架铲板1.4上设置有油缸安装耳ⅲ,铲板翻转油缸1.7的两端分别与两个油缸安装耳ⅲ铰接。
44.进一步地,后架1.1的底部设置有伸缩支腿1.8,伸缩支腿1.8由支腿伸缩部驱动向下伸出支撑在地面上或向上收缩处于悬空状态。支腿伸缩部为支腿伸缩油缸。
45.电控系统可实现一键启停及手动遥控自动切换,提高矿用发动机驱动履带式双驾驶室单元支架搬运机器人的自动化,保障整体安全性。电控系统包括电控箱4.1、仪表显示器4.2和报警器4.3。仪表显示器4.2具有数据上传功能,实时监控矿用发动机驱动履带式双驾驶室单元支架搬运机器人整体运行状态。报警器4.3具有人员接近报警功能。
46.液压系统为搬运机构1动作以及履带底盘总成7行走提供动力,包括液压油箱5.1、液压泵5.2、多路阀5.3和先导操作手柄5.4;履带底盘总成8中的驱动件为液压马达8.1;液压泵5.2与发动机总成7连接,用于将液压油箱5.1中的液压油泵送至多路阀5.3;多路阀5.3通过先导操作手柄5.4进行进出油换向,将液压油分别送至中间架翻转油缸1.5、前架翻转油缸1.6、铲板翻转油缸1.7、支腿伸缩油缸和液压马达8.1中。
47.乳化液系统用于为单元支架补液以及接受单元支架的回液,包括乳化液箱6.1、乳化液泵站6.2和操作阀6.3;乳化液箱6.1和乳化液泵站6.2均布置在主机架2上,乳化液箱6.1和乳化液泵站6.2通过乳化液管连接,乳化液泵站6.2由发动机总成7驱动;操作阀6.3用于控制乳化液泵站6.2。
48.前驾驶室3a设置在主机架2的前侧,包括座椅3.1以及铰接在座椅3.1顶部的座椅挡板3.2,座椅挡板3.2具有高度自适应、可调节功能。先导操作手柄5.4和仪表显示器4.2设置在座椅3.1同侧或两侧。后驾驶室3b设置在主机架2的后侧,后驾驶室3b内布置有座椅3.1、先导操作手柄5.4和仪表显示器4.2,先导操作手柄5.4位于座椅3.1的正前方,仪表显示器4.2位于座椅3.1的一侧。
49.主机架2包括前主机架2.1、后主机架2.2和配重块2.3;前主机架2.1与后主机架2.2通过螺栓连接;配重块2.3布置在后主机架2.2下方,主要作用在于平衡矿用发动机驱动履带式双驾驶室单元支架搬运机器人的重心,提高矿用发动机驱动履带式双驾驶室单元支架搬运机器人行进过程中的稳定性。
50.履带底盘总成8、乳化液系统、前驾驶室3a、液压油箱5.1、多路阀5.3、电控箱4.1、报警器4.3布置在前主机架2.1上,后驾驶室3b、液压泵5.2和发动机总成7布置在后主机架2.2的安装槽内。
51.发动机总成7采用柴油发动机,通过联轴器与液压泵5.2连接。
52.实施例2
53.图1-图4中,中间架1.2为左翻转架,前架1.3为右翻转架。中间架1.2的左侧设置两个单铰耳,后架1.1的左侧设置上下两组双铰耳,中间架1.2左侧的单铰耳嵌入后架1.1左侧的双铰耳中间,通过铰轴连接。中间架1.2的右侧设置上下两组双铰耳,前架1.3的右侧设置两个单铰耳,前架1.3右侧的单铰耳嵌入中间架1.2右侧的双铰耳中间,通过铰轴连接。以图
1-图4中位置关系为例,说明上述发动机驱动履带式双驾驶室单元支架搬运机器人的工作过程。
54.当需要搬运的单元支架处于单元支架搬运机器人的右侧时,单元支架搬运机器人行驶至需要搬运的单元支架前,操作液压系统驱动支撑腿1.8伸出直至与地面完全接触,完成支撑动作,保证单元支架搬运过程的稳定性。搬运机构1初始状态如图1和图2所示,支架铲板1.4、前架1.3、中间架1.2完全收拢,前架翻转油缸1.6向外拉伸,推动前架1.3向右前方摆动,直至前架1.3与单元支架平行;然后铲板翻转油缸1.7拉伸,使支架铲板1.4伸入单元支架顶梁和单元支架底座之间同时向上翻转,直至与初始位置成90
°
,如图3所示;操作乳化液系统与单元支架上的快插阀接通,使单元支架立柱收缩,单元支架顶梁首先与支架铲板1.4接触,单元支架立柱继续收缩,直至单元支架底座悬空;最后,前架翻转油缸1.6向内收缩,带动前架1.3回到初始位置,单元支架摆至搬运机构1的正前方,完成一次完整的右侧单元支架搬运动作。
55.当需要搬运的单元支架处于单元支架搬运机器人的左前方时,单元支架搬运机器人行驶至需要搬运的单元支架前,操作液压系统驱动支撑腿1.8伸出直至与地面完全接触,完成支撑动作,保证单元支架搬运过程的稳定性。搬运机构的初始状态依然如图1和图2所示,此时,中间架翻转油缸1.5向外拉伸,推动中间架1.2向左前方摆动,直至中间架1.2与单元支架平行;然后铲板翻转油缸1.7拉伸,使支架铲板1.4伸入单元支架顶梁和单元支架底座之间同时向上翻转,直至与初始位置成90
°
,如图4所示;操作乳化液系统与单元支架上的快插阀接通,使单元支架立柱收缩,单元支架顶梁首先与支架铲板1.4接触,单元支架立柱继续收缩,直至单元支架底座悬空;最后,中间架翻转油缸1.5向内收缩,带动中间架1.2回到初始位置,单元支架摆至搬运机构1的正前方,完成一次完整的左侧单元支架搬运动作。
56.操作人员可通过操作遥控/手动切换阀,操作上述支架搬运动作。
57.最后应说明的是:以上各实施例仅用以说明本发明的技术方案,而非对其限制;尽管参照前述各实施例对本发明进行了详细的说明,本领域的普通技术人员应当理解:其依然可以对前述各实施例所记载的技术方案进行修改,或者对其中部分或者全部技术特征进行等同替换;而这些修改或者替换,并不使相应技术方案的本质脱离本发明各实施例技术方案的范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1