一种水上施工作业船的制作方法
1.本发明属于水上工程设备领域,尤其是一种水上施工作业船。
背景技术:
2.传统的桥梁底面检修,一般分为两种施工工艺。一种是在桥梁下方,将两条船舶绑在一起,在船舶上或者桥墩上建造脚手架,搭建施工平台,人员再在平台上施工和检测;此种方法搭建脚手架周期长,风险大,如果突然遇到大风或者突发大水等情况,很容易产生船舶移动和脚手架倾覆,造成巨大的人员伤亡和财产损失。另一种,在桥梁上临时交通管制,利用智能化的桥梁检测车开展桥梁底面的检测,但是此类只针对少量的平直桥梁,无法对缆索桥、钢梁桥等桥梁开展检测,检测局限性很大,对于人员的操作要求较高,同时,还需要长时间占用公路。
3.申请人通过长期实践研究发现,现有技术存在如下缺陷和不足:桥梁检测一般需要起重作业和举高作业,需要起重机和高空作业车两种设备,而这些设备只能停留在桥面上,无法对桥面下开展吊装和举高作业。
技术实现要素:
4.为了克服上述技术缺陷,本发明提供一种水上施工作业船,以解决背景技术所涉及的问题。
5.本发明提供一种水上施工作业船,包括:
6.施工船舶,在所述施工船舶上设置有至少三个伸缩式定位桩系统,所述定位桩系统采用两级伸缩油缸控制。
7.作业平台,焊接在所述施工船舶的船甲板的支架上,采用至少三台独立的液压缸剪刀叉支撑结构组成;
8.起重机,为伸缩折叠臂式起重机,安装在所述施工船舶的结构梁上。
9.优选地或可选地,所述定位桩系统包括:
10.一级伸缩机构,包括竖直安装在所述施工船舶上、输出端位于上方的一级油缸,和位于上部的封闭端与一级油缸的推杆固定连接、且位于下部的开口端朝向下方的安装套筒;
11.二级伸缩机构,包括竖直安装在所述安装套筒内部的二级油缸,和滑动安装在所述安装套筒上、且与所述二级油缸的推杆相连接的定位桩。
12.优选地或可选地,所述一级油缸和二级油缸内均设置有位移传感器,所述有位移传感器采用磁致伸缩式内置油缸传感器。
13.优选地或可选地,所述定位桩系统油缸设置压力传感器。
14.优选地或可选地,所述液压缸剪刀叉支撑结构包括:
15.四个剪叉机构,所述剪叉机构由多组剪叉杆依次铰接构成,横向对齐的两个剪叉机构支架通过横梁连接,形成一个整体;所述剪叉机构从下向上分布着第一剪叉杆、第二剪
叉杆和第三剪叉杆,所述第一剪叉杆中一个连杆的底端与施工船舶的船甲板之间还设置有一个滑动件,使得所述第一剪叉杆中一个连杆的底端可沿着所述施工船舶的船甲板线性移动;
16.四个升降油缸,所述升降油缸一端铰接在所述第一剪叉杆上、另一端铰接在所述第三剪叉杆上,驱动所述剪叉机构的收缩和展开;
17.升降平台,铰接安装在四个剪叉机构上方。
18.优选地或可选地,所述升降平台上方四角加装高度可调的限位开关。
19.优选地或可选地,所述升降油缸内设置有位移传感器,所述有位移传感器采用磁致伸缩式内置油缸传感器。
20.优选地或可选地,所述作业平台侧面下方设有随动梯子。
21.优选地或可选地,所述升降平台四周设有护栏,所述护栏可向平台内侧折叠,并安装有检测护栏门开关的信号装置,以发出门已关闭和开启的状态信号,同作业平台启动联锁。
22.优选地或可选地,所述施工船舶的结构梁上安装可滑动式导轨,所述起重机底盘设置有导轮和液压卡盘,所述导轮可滑动安装在所述导轨上,所述液压卡盘可夹紧所述结构梁上。
23.本发明涉及一种水上施工作业船,相较于现有技术,具有如下有益效果:
24.1、本发明可以将施工船舶直接开到桥底,高空作业平台提升,人工和设备上平台,可以直接对桥梁底面开展人工无障碍检测,不需要在河底搭建脚手架;
25.2、本发明可以将施工船舶直接开到桥底,定位桩定位,起重机不仅仅可以将大尺寸货物从船舶上吊装到桥梁上面,还可以实现桥梁底下的吊装施工,免去了陆地工程机械封锁道路施工、周期长的问题;针对缆索桥、钢梁桥等桥梁,现有桥梁检测车无法开展对桥梁底面的检测工作,本发明可以直接从河面上开展检测,方便快捷。
26.3、本发明通过伸缩式定位桩设计,定位桩伸缩油缸里安装压力传感器和位移传感器,实现定位桩伸缩单独可控,并通过控制系统实现各个定位桩的压力保持在一定的设置区间,让船舶良好固定。
27.4、本发明通过在升降平台上方四角加装高度可调的限位开关,当有障碍物触碰到限位开关时升降平台会自动停止上升,防止桥下作业时操作不注意时无限升高,避免产生挤压伤害。
28.5、本发明的升降平台降低到最低位置时,升降平台高度同甲板水平,方便行走。
29.6、本发明的升降平台侧面下方设有可供人员上下的梯子,梯子为随动梯子,升降平台在任意高度,梯子踏板都水平。梯子上端与平台连接处有供人员上下平台的出入口。
30.7、本发明的护栏可向升降平台内侧折叠,有检测护栏门开关的信号装置,以发出门已关闭和开启的状态信号,同升降平台启动联锁。另外部分有可能妨碍工作的护栏可与台面通过螺栓连接,需要拆除时可随时拆除。
31.8、本发明的起重机安装在船舶的主要结构梁上,结构梁上安装可滑动式导轨,起重机底盘用液压卡盘夹紧在结构梁上。当起重机未工作时,起重机底盘可以通过液压油缸驱动,将起重机整体在导轨上滑动一定范围,扩大起重机的作业范围。
32.综上所述,本发明将集成起重机、高空作业平台和专业施工船舶,解决桥梁底面无
障碍检测,通过升降式高空作业平台,施工人员和装备就可以对桥底开展检测。施工船舶上安装了大吨位伸缩式起重机,可以在船舶上开展吊装作业,覆盖整个船舶的作业范围,解决了桥面以下无法开展起重作业的难题。
附图说明
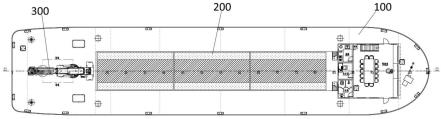
33.图1是本发明中施工作业船的俯视图。
34.图2是本发明中施工作业船的侧视图。
35.图3是本发明中定位桩系统的工作状态图一。
36.图4是本发明中定位桩系统的工作状态图二。
37.图5是本发明中定位桩系统的工作状态图三。
38.图6是本发明中位移传感器内置在油缸中的安装示意图。
39.图7是本发明中作业平台的工作状态图一。
40.图8是本发明中作业平台的工作状态图二。
41.图9是本发明中作业平台的工作状态图三。
42.图10是本发明中液压缸剪刀叉支撑结构的结构示意图。
43.图11是本发明中起重机的安装示意图。
44.附图标记为:施工船舶100、定位桩系统110、一级油缸111、安装套筒112、二级油缸113、定位桩114、磁致伸缩式内置油缸传感器115、缸体111a、油腔111b、活塞杆111c、容纳腔体111d、波导丝115a、非导磁垫片115b、位置磁铁115c、作业平台200、液压缸剪刀叉支撑结构210、第一剪叉杆211、第二剪叉杆212、第三剪叉杆213、升降油缸214、升降平台215、限位开关216、随动梯子217、护栏218、滑动件219、起重机300、导轮310、液压卡盘320、驱动油缸330、导轨340。
具体实施方式
45.在下文的描述中,给出了大量具体的细节以便提供对本发明更为彻底的理解。然而,对于本领域技术人员而言显而易见的是,本发明可以无需一个或多个这些细节而得以实施。在其他的例子中,为了避免与本发明发生混淆,对于本领域公知的一些技术特征未进行描述。
46.参阅附图1至11,一种水上施工作业船,包括:施工船舶100、作业平台200和起重机300。
47.其中,参阅附图1,施工船舶100为专业施工船舶100,其最大船长55.15m,总长55m,吃水深度1.9m,航区a级。在施工船舶100上设置有至少三个伸缩式定位桩114系统110,即可保证施工船舶100在施工过程中的稳定性,但是考虑到施工船舶100的重心稳定性问题,本实施例优选为四个伸缩式定位桩114系统110,重心更不易偏离稳定区,更可靠,与施工船舶100的形状更为协调。
48.所述定位桩114系统110采用两级伸缩油缸控制,至少存在两个位置状态,一是,所述定位桩114系统110处于完全伸长或部分伸长状态,定位桩114下插到河底,将船舶固定。二是,所述定位桩114系统110完全收缩或部分收缩,尽可能降低甲板上方的定位桩114系统110的高度,保证施工作业船顺利通过桥梁。
49.参阅附图3至5,所述定位桩114系统110包括:一级伸缩机构和二级伸缩机构;所述一级伸缩机构包括竖直安装在所述施工船舶100上、输出端位于上方的一级油缸111,和位于上部的封闭端与一级油缸111的推杆固定连接、且位于下部的开口端朝向下方的安装套筒112;二级伸缩机构包括竖直安装在所述安装套筒112内部的二级油缸113,和滑动安装在所述安装套筒112上、且与所述二级油缸113的推杆相连接的定位桩114。
50.结合工程实施例进行说明,一级伸缩机构和二级伸缩机构的行程均为3000mm。当施工作业船处于闲置状态时,一级伸缩机构正常伸长,二级伸缩机构收缩容纳于所述安装套筒112内部,所述定位桩114系统110位于施工船舶100内部和上方,对应附图3左侧定位桩114系统110,整个施工船舶100受到的水阻最小,稳定性也最高;此时定位桩114系统110相距于船甲板的高度约为4120mm,相距于水面高度为7412mm,基本能够通过一般设计要求的桥梁了。当施工作业船通过一些桥高较小的跨河桥梁和高水位桥梁时,可以适当收缩一级伸缩机构,使得定位桩114系统110的下部位于水中,以此降低定位桩114系统110上部的高度,一般降低到相距于船甲板的高度约3120mm左右即可,与施工船舶100上的艏楼高度基本一致,对应附图5左侧定位桩114系统110。当所述当施工作业船处于工作状态时,一级伸缩机构正常收缩,二级伸缩机构伸长,尽可能的展开所述定位桩114系统110,将定位桩114下插到河底,将船舶固定,对应附图4右侧定位桩114系统110。
51.值得说明的是,一级油缸111和二级油缸113的输出方向相反,所述定位桩114系统110在工作状态和闲置状态下中,一级油缸111和二级油缸113中至少一个处于伸长状态,另一个处于收缩状态,对于整个供油系统的压力变化较小,提高了整个供油系统压力的稳定性和使用寿命。
52.在进一步实施例中,所述一级油缸111和二级油缸113内均设置有位移传感器,用于监测定位桩114的伸缩距离,每个定位桩114的油缸通过控制系统,可以单独控制,也可以同步控制。其中,所述有位移传感器采用磁致伸缩式内置油缸传感器115,位移传感器采用磁致伸缩式内置油缸传感器115,不受外界环境影响。
53.具体地,参阅附图6,所述一级油缸111和二级油缸113的缸体111a上固定有磁致伸缩式内置油缸传感器115,在所述活塞杆111c的内部形成一个容纳腔体111d,所述磁致伸缩式内置油缸传感器115的一侧波导丝115a穿过油缸内的油腔111b插入所述容纳腔体111d内,所述容纳腔体111d外端处设置有夹持有能够被所述波导丝115a穿过的环形非导磁垫片115b和位置磁铁115c。通过检测波导丝115a和环形非导磁垫片115b、位置磁铁115c之间的相对移动,确定所述一级油缸111和二级油缸113的位移量。
54.在进一步实施例中,由于河底情况复杂,有可能高低不平,位移传感器很容易导致误判,而在定位桩114系统110油缸上设置压力传感器,控制系统根据压力反馈,调整定位桩114伸缩距离。当定位桩114压力过低时,说明定位桩114还没完全插到位,定位桩114需要继续插入河底,直到四个定位桩114的压力达到统一设置区间。这样就可以判定定位桩114能够达到足够的深度,固定在河底,使船舶稳固。
55.参阅附图7至9,作业平台200焊接在所述施工船舶100的船甲板的支架上,采用至少三台独立的液压缸剪刀叉支撑结构210组成;升降高度为8m,平台降低到最低位置时,平台高度同甲板水平,方便行走。
56.参阅附图10,所述液压缸剪刀叉支撑结构210包括:四个剪叉机构、四个升降油缸
214和升降平台215。其中,所述剪叉机构由多组剪叉杆依次铰接构成,横向对齐的两个剪叉机构支架通过横梁连接,形成一个整体;所述剪叉机构从下向上分布着第一剪叉杆211、第二剪叉杆212和第三剪叉杆213,所述第一剪叉杆211中一个连杆的底端与施工船舶100的船甲板之间还设置有一个滑动件219,使得所述第一剪叉杆211中一个连杆的底端可沿着所述施工船舶100的船甲板线性移动;所述升降油缸214一端铰接在所述第一剪叉杆211上、另一端铰接在所述第三剪叉杆213上,驱动所述剪叉机构的收缩和展开;升降平台215铰接安装在四个剪叉机构上方。同样地,所述升降油缸214内设置有位移传感器,所述有位移传感器采用磁致伸缩式内置油缸传感器115,其结构参阅附图,在此不作赘述。
57.在本实施例中,剪叉杆的材料为400*200*12mm矩形管,底上架主料为32#与28#槽钢及矩形管,台面铺5mm花纹板。
58.在进一步实施例中,升降平台215侧面下方设有可供人员上下的梯子,梯子为随动梯子217,平台在任意高度,梯子踏板都水平。梯子上端与平台连接处有供人员上下平台的出入口。
59.在进一步实施例中,在所述升降平台215四周设高度1.1米的护栏218,护栏218材料为碳钢圆管,增加栏杆立柱数量,以防止栏杆在使用过程中产生晃动,护栏218下设100mm高的踢脚。护栏218可向平台内侧折叠,有检测护栏218门开关的信号装置,以发出门已关闭和开启的状态信号,同升降平台215启动联锁。另外部分有可能妨碍工作的护栏218可与台面通过螺栓连接,需要拆除时可随时拆除。
60.另外,升降平台215上方四角加装高度可调的限位开关216(1.1-1.8米高度可调),当有障碍物触碰到限位开关216时平台会自动停止上升,防止桥下作业时操作不注意时无限升高。如图3所示,在平台的四角安装,探测口朝上。
61.在升降作业时,在桥下作业时平台可采用点动操作模式,平台上的操作人员手摁下按钮平台上升,松开即停止,属于安全操作模式。三个平台通过控制系统,可以联动,也可以单独控制。联动时,一个控制箱可以控制三个平台同步举升和下降,方便运输较大较长的物品等。平台可在行程范围内任意位置停止。每组平台都在油缸上安装位移传感器,通过油缸的位移传感器,可以计算出平台的升高高度,如图3所示。位移传感器采用油缸内置的磁致伸缩式传感器,如图5所示。可设定平台升起的高度,自动升到设定高度后停止。升降按钮分两种操控模式,一种按下按钮平台自动连续升降,到限位开关216或者设定高度后停止;一种是点动升降模式,按下按钮平台升降,松开按钮即停止,可对平台高度进行微调,这种模式更安全。两种操控模式可通过旋钮开关来切换。升降平台215上电气设备均为防水型,平台设置三个位置的行程开关,极限位置、上限位和下限位开关216,极限位置开关设在8m高度处,上限位开关216设在常用高度,下限位开关216设在平台最低位置。此外,在上限位置8m处提供一个机械死挡,防止在某一限位开关216出现故障时由于过度延伸导致的损坏。
62.参阅附图11,所述起重机300为伸缩折叠臂式起重机300,臂架结构采用6节伸缩臂+2节折叠臂形式设计,最大工作幅度19m,最大起升高度21m,最小幅度4.95m下起重量70000kg,最大幅度19m下起重量12000kg。臂架变幅和伸缩采用液压缸无极控制,可以在任意幅度和高度上停留。
63.所述起重机300安装在所述施工船舶100的结构梁上。所述施工船舶100的结构梁上安装可滑动式导轨340,所述起重机300底盘设置有导轮310和液压卡盘320,所述导轮310
可滑动安装在所述导轨340上,所述液压卡盘320可夹紧所述结构梁上。当起重机300未工作时,起重机300底盘可以通过液压驱动油缸330驱动,将起重机300整体在导轨340上滑动一定范围,扩大起重机300的作业范围。当起重机300工作时,通过液压卡盘320可夹紧所述结构梁上,保证起重机300的稳定性。
64.另外需要说明的是,在上述具体实施方式中所描述的各个具体技术特征,在不矛盾的情况下,可以通过任何合适的方式进行组合。为了避免不必要的重复,本发明对各种可能的组合方式不再另行说明。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1