施工升降机安全智能控制方法及其控制系统与流程
1.本发明涉及施工升降机安全控制的技术领域,尤其是涉及一种施工升降机安全智能控制方法及其控制系统。
背景技术:
2.随着我国国民经济的持续发展,高层建筑逐渐增多,建设高层建筑的施工升降机数量急剧增长,施工升降机除了应用在高层建筑中,还可以应用在大桥的建设、大型化工厂冷却塔、发电厂的烟囱、广播电视塔以及煤矿等多种施工场合,施工升降机已成为建筑行业中一种必不可少的机械设备。施工升降机又称建筑用施工电梯,在建筑施工过程中,通常是配合塔吊使用,一般载重量在1-3吨,可用于载人和载货。
3.用于施工的升降机通常包括竖直设置的导轨架以及沿导轨架升降的吊笼,该吊笼用于运送人和/或施工材料。每个导轨架由多个标准节竖直依次对接而成,对接面上借由螺栓与螺母连接。吊笼通过安装在吊笼侧面的电机驱动齿轮与导轨架上的齿条啮合,并且配合安装在导轨架顶端的电机带动钢缆拉动吊笼,进而以带动升降机实现垂直升降运动。而其中的齿轮与齿条的啮合情况对整机运行的效率、工作可靠性、平稳性有很大影响,需要定时进行润滑。通过润滑可促进齿面间的滑动,抑制齿面间由摩擦所引起的温度上升,减小阻力及摩擦功,降低噪声、振动和齿轮齿条间的冲击,增加使用寿命。
4.吊笼与导轨架之间在长时间使用摩擦的过程中容易令齿轮与齿条出现卡涩,不仅降低吊笼的运行速度,而且卡涩严重时会对升降机的安全产生隐患。
5.然而,由于管理疏忽、滞后或其他原因,工地中的升降机经常难于及时进行润滑,使得升降机的工作处于危险状态。
技术实现要素:
6.本发明目的一是提供一种施工升降机安全智能控制方法,具有能够在升降机运行状态下自动为齿轮与齿条进行润滑的特点。
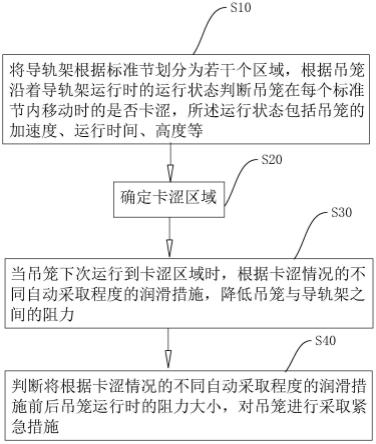
7.本发明的上述发明目的一是通过以下技术方案得以实现的:一种施工升降机安全智能控制方法,所述方法包括:将导轨架根据标准节划分为若干个区域,根据吊笼沿着导轨架运行时的运行状态判断吊笼在每个标准节内移动时的是否卡涩,所述运行状态包括吊笼的加速度、运行时间、高度等;确定卡涩区域;当吊笼下次运行到卡涩区域时,根据卡涩情况的不同自动采取程度的润滑措施,降低吊笼与导轨架之间的阻力;判断将根据卡涩情况的不同自动采取程度的润滑措施前后吊笼运行时的阻力大小,对吊笼进行采取紧急措施。
8.通过采用上述技术方案,当吊笼沿着导轨架移动时,获取吊笼沿着导轨架中的每
个标准节移动时的运行状态,进而将导轨架中的标准节与导轨之间阻力较大的定义为卡涩状态,此时当吊笼再次经过卡涩状态的标准节时,根据卡涩情况的不同自动采取程度的润滑措施,以降低吊笼与标准节之间的阻力,有利于提高对升降机的智能控制。根据导轨架中不同位置的标准节与吊笼之间的阻力不同,使得当吊笼再次移动至卡涩区域内时,能够根据阻力的大小情况控制喷淋口喷射处不同量的润滑油,从而有利于提高对升降机的智能控制本发明在一较佳示例中可以进一步配置为:所述根据吊笼沿着导轨架运行时的运行状态判断吊笼在每个标准节内移动时的是否卡涩包括:获取吊笼的总重量m1,移动楼层的高度h,计算出预计加速度a1,根据加速度a1计算出理论阻力f1;获取吊笼升降过程中的实际运行加速度a2,根据加速度a2计算出实际阻力f2;计算出实际阻力f2与理论阻力f1之间差的绝对值,得到第一计算值,并将第一计算值与预设的第一阈值进行比较,当第一计算值大于第一阈值时,将吊笼与导轨架之间定义为卡涩。
9.通过采用上述技术方案,首先通过计算机自动获取吊笼以及吊笼内工作人员的总重量m1,根据移动目标楼层与起始楼层之间的高度计算出当吊笼沿着导轨架移动时所需要的预计加速度a1,以及顶部电机和侧面电机输出的驱动力f,根据驱动力f、预计加速度a1以及总重量m1计算出理论阻力f1,理论阻力f1表示正常状态下吊笼与导轨架之间的阻力,并且正常状态下的阻力在吊笼移动过程中大小不变。
10.利用相同的方法计算出吊笼实际运行状态下的实际阻力f2,比较实际阻力f2与理论阻力f1之间的差值,进而获得得到第一计算值,将第一计算值与预设的阈值进行比较,从而判断吊笼与导轨架之间是否卡涩。
11.本发明在一较佳示例中可以进一步配置为:所述确定卡涩区域包括:分别获取出吊笼在每个标准节上运行时的实际阻力f2,将吊笼沿着标准节运行时的第一计算值大于第一阈值的标准节定义为卡涩标准节,并根据每个卡涩标准节的阻力大小将若干个卡涩标准节进行卡涩严重程度标记。
12.通过采用上述技术方案,将导轨架按照标准节的高度划分为若干个区域,吊笼沿着导轨架移动时,分别获取每个吊笼与导轨架中每个标准节之间的摩擦力,从而分别将导轨架上的标准节进行筛选,将与吊笼之间阻力较大的标准节定义为卡涩标准节,并将多个卡涩标准节组成卡涩区域。并且将卡涩区域内的卡涩标准节按照卡涩时的阻力大小进行卡涩严重程度进行标记,以便于在吊笼移动至卡涩标准节处时,以令计算机获取卡涩的清况。
13.本发明在一较佳示例中可以进一步配置为:当吊笼下次运行到卡涩区域时,根据卡涩情况的不同自动采取程度的润滑措施,降低吊笼与导轨架之间的阻力包括:在吊笼上设置有用于喷淋润滑油的喷淋口,喷淋口朝向吊笼的齿轮与导轨架的齿条之间;吊笼再次运行到卡涩区域时,根据卡涩区域内的卡涩标准节对应的卡涩严重程度大小调整喷淋口喷出的润滑油的量。
14.通过采用上述技术方案,提前在吊笼的顶部设置有喷淋口,喷淋口朝向齿轮和齿条的啮合处,并且喷淋口能够喷射出用于令齿轮与齿条润滑的润滑油。吊笼沿着导轨架移动的过程中,当吊笼移动至卡涩区域内的卡涩标准节时,计算机根据最新的卡涩严重程度控制喷淋口喷射处的润滑油的量,即卡涩越严重的位置,润滑油的消耗越多,需要喷射的润
滑油越多,从而令升降机能够依据吊笼与标准节之间的实际阻力控制润滑油的量,使得润滑油处于适量状态。
15.本发明在一较佳示例中可以进一步配置为:所述判断将根据卡涩情况的不同自动采取程度的润滑措施前后吊笼运行时的阻力大小包括:获取润滑后的吊笼在卡涩区域内运行时的加速度a3,根据此次吊笼的重量计算出润滑后的阻力f3;利用此次吊笼的重量与上次时吊笼的重量的比例关系计算出等质量吊笼时的润滑阻力f3’。
16.通过采用上述技术方案,由于每次吊笼运行时的重量不会相同,因此获取下一次吊笼的总质量m2,首先计算出总质量m2对应的阻力f3,再利用阻力与吊笼重量之间呈正比例关系,计算出此次吊笼的总重量m2与上次吊笼的总重量m1之间的倍差,进而根据倍差计算出与当此次吊笼的总重量m2与上次吊笼总重量m1重量相同的情况下的润滑阻力f3’,进而有利于令两侧测量的情况处于相同的状态下,有利于消除误差。
17.本发明在一较佳示例中可以进一步配置为:所述对吊笼进行采取紧急措施包括:比较润滑阻力f3’和阻力f2的大小,计算出润滑阻力f3’和阻力f2之间差,获得润滑阻力 f3’和阻力f2之间差的绝对,得到第二计算值;将第二计算值与预设的第二阈值进行比较,判断润滑措施是否有效;若润滑措施无效时,对吊笼进行采取紧急措施。
18.通过采用上述技术方案,令润滑阻力f3’与实际阻力f2进行比较,根据两者之前差的绝对值计算得到第二计算值,第二计算值表示经过润滑后相同重量的吊笼在相同的位置处的运行时,阻力是否由于润滑措施而减低。若第二计算值小于预设的第二阈值时,则表示润滑措施的效果不明显,此处的标准节与吊笼之间的阻力除了摩擦力之外还有其他抵抗力,且其他抵抗力占大部分,可能会存在机械故障。
19.本发明在一较佳示例中可以进一步配置为:所述紧急措施包括:降低顶部电机对钢缆的输出功率,降低吊笼的移动速度;获取吊笼的移动方向,控制顶部电机以及侧面电机带动吊笼反向移动以令吊笼脱离卡涩区域;重新令吊笼返回正常移动方向,继续运行。
20.通过采用上述技术方案,由于润滑措施失效后,只表示润滑效果不明显,可能存在机械故障,也有可能是偶然性的故障。因此,首先降低顶部电机以及侧面电机对吊笼的输出力,降低钢缆对吊笼的拉力,令吊笼以较平缓的速度运行,此时吊笼的加速度接近零,钢缆以及齿轮对吊笼的力最小。之后控制吊笼反向移动,使得吊笼与卡涩区域处的卡涩标准节脱离,以提高吊笼沿着导轨架移动的可能。最后再次驱动吊笼以预设的方向移动,令吊笼再次进行尝试,利用吊笼与卡涩标准节之间的冲击力尝试克服之间的阻力,进而消除偶然性的故障的可能。
21.本发明在一较佳示例中可以进一步配置为:所述紧急措施还包括:顶部电机重复带动吊笼反向移动无法脱离卡涩区域时,令顶部电机带动吊笼移动至就近的楼层门处停止,令吊笼内的工作人员进行离开吊笼。
22.通过采用上述技术方案,若进行尝试后,依旧无法克服吊笼与标准节之间的阻力时,此时的阻力定义为由机械故障导致的,从而令吊笼无法正常继续移动。为了保证吊笼内
工作人员的人身安全,令吊笼移动至最近的楼层的开门口处,令吊笼停置运行,以便于令工作人员快速离开吊笼。
23.第二方面,本技术提供一种施工升降机安全智能控制系统,采用如下的技术方案:一种施工升降机安全智能控制系统,包括加速检测模块,用于实时检测吊笼沿着导轨架移动时的加速度数据;重量检测模块,用于获取吊笼以及吊笼内工作人员、工具等总重量;驱动力计算模块,用于计算出顶部电机以及侧面电机作用于吊笼上的输出力;计算模块,用于根据吊笼的总重量、加速度数据、输出力计算出吊笼与标准节之间的阻力,并根据阻力大小将卡涩标准节进行卡涩严重程度标记,控制喷淋口喷射润滑油;润滑油喷淋装置,响应于计算模块的控制信号,从而根据吊笼与标准节之间卡涩严重程度喷射处对应量的润滑油。
24.综上所述,本技术包括以下至少一种有益技术效果:1.根据导轨架中不同位置的标准节与吊笼之间的阻力不同,使得当吊笼再次移动至卡涩区域内时,能够根据阻力的大小情况控制喷淋口喷射处不同量的润滑油,从而有利于提高对升降机的智能控制;2.当吊笼初次与标准节出现卡涩时,令吊笼能够有一次反向移动之后再次冲击卡涩位置的控制,有利于消除偶然性的故障,提高吊笼运行时的智能性。
附图说明
25.图1是本技术的一种施工升降机安全智能控制方法流程图;图2是本技术的根据吊笼沿着导轨架运行时的运行状态判断吊笼在每个标准节内移动时的是否卡涩的方法流程图;图3是本技术的判断将根据卡涩情况的不同自动采取程度的润滑措施前后吊笼运行时的阻力大小,对吊笼进行采取紧急措施的方法流程图。
具体实施方式
26.以下结合附图1-3对本发明作进一步详细说明。
27.本发明实施例一提供一种施工升降机安全智能控制方法,参照图1和图2,所述方法主要流程包括:s10、将导轨架根据标准节划分为若干个区域,根据吊笼沿着导轨架运行时的运行状态判断吊笼在每个标准节内移动时的是否卡涩,所述运行状态包括吊笼的加速度、运行时间、高度等。
28.导轨架由若干个标准节竖直依次对接而成,每个标准节上均设置有齿条,相邻的每段齿条依次对接形成供吊笼移动的轨迹。吊笼的侧面转动安装有齿轮,齿轮由侧面电机驱动。将导轨架按照标准节的高度划分为若干个区域,进而当吊笼沿着导轨架升降移动时,会依次经过每个区域,获取吊笼在每个区域内的运行状态,并且根据吊笼的运行状态判断该区域是否会令齿轮与齿条卡涩。
29.s11、获取吊笼的总重量m11,移动楼层的高度h,计算出预计加速度a1,根据加速度a1计算出理论阻力f1。
30.当在测试升降机是否安全时,将吊笼停置于其中任一楼层的楼层门处,打开吊笼,以令工作人员进入到吊笼内,为吊笼设定移动目标楼层。起始楼层与目标楼层之间的高度差为高度h,高度h至少大于两个标准节的高度,每个标准节的高度为高度h。通过设定在吊笼内的传感器获取到吊笼以及吊笼内工作人员等总重量m1、预计运行时间t1以及加速度a1。根据总重量m1和高度h计算出吊笼沿着每个标准节运行时的理论阻力f1。
31.其中,加速度a1的计算方法为:f为顶部电机拉动钢缆对吊笼的拉力以及侧面电机的输出力,g为升降机所处位置的重力加速度。当吊笼处于变速状态下时,a1的绝对值大于0。当吊笼处于匀速状态下时,a1的绝对值等于0。
32.根据加速度a1的计算公式计算出理论阻力f1的大小,f1=f-(a1m1+m1g);当吊笼处于变速状态下时,理论阻力f1=f-(a1m1+m1g)。当吊笼处于匀速状态下时,理论阻力f1=f-m1g。
33.正常状态下,吊篮沿着每个标准节移动时的理论阻力f1大小相等。
34.s12、获取吊笼升降过程中经过每一节标准节高度时的实际运行时间t2,加速度a2,根据加速度a2计算出实际阻力f2。
35.实际阻力f2的计算公式为:f2=f-(a2m1+m1g);当吊笼处于变速状态下时,实际阻力f2=f-(a2m1+m1g)。当吊笼处于匀速状态下时,实际阻力f2=f-m1g。
36.s13、计算出实际阻力f2与理论阻力f1之间差的绝对值,得到关于实际阻力f2与理论阻力f1之间大小关系的第一计算值,将第一计算值与预设的第一阈值进行比较,判断实际阻力f2是否处于正常的范围内。
37.一般情况下,实际阻力f2的数值大于理论阻力f1的数值。若第一计算值小于第一阈值,则表示吊笼与导轨架之间为正常状态,不需要进行润滑。若第一计算值大于第一阈值,则表示吊笼与导轨架之间为卡涩状态,当吊笼运行到此处时需要进行润滑。
38.参照图1,s20、确定卡涩区域。
39.卡涩区域由一个或多个与吊笼处于卡涩状态的标准节组成。具体的,导轨架由多节标准节组成。当吊笼沿着导轨架移动的过程中,分别获取吊笼与每一节标准节之间的实际阻力f2,并对每节标准节对应的实际阻力f2与理论阻力f1进行计算,分别得到对应关于每一节标准节的第一计算值。吊笼在移动过程中,每一节标准节对应一个第一计算值。
40.根据每一节标准节计算得到的第一计算值的大小关系表示此处对应位置的标准节与吊笼之间的阻力大小。第一计算值越大,吊笼移动至此处标准节时的阻力越大。
41.将第一计算值大于第一阈值的标准节筛选出来,此类标准节定义为卡涩标准节,卡涩标准节组成卡涩区域,卡涩区域由一个或多个卡涩标准节组成。
42.根据卡涩区域内的卡涩标准对应的第一计算值的大小对卡涩标准节进行排列,第一计算值的数值越大,此处位置的标准节与吊笼之间的阻力越大,卡涩严重度更高。因此将
卡涩区域内的卡涩标准节根据第一计算值的大小进行卡涩严重程度标记。第一计算值的数值越大,卡涩严重程度的等级越高。
43.参照图1,s30、当吊笼下次运行到卡涩区域时,根据卡涩情况的不同自动采取程度的润滑措施,降低吊笼与导轨架之间的阻力。
44.在吊笼经过卡涩区域时,控制喷淋口喷射润滑油降低摩擦力。具体的,提前在吊笼上安装可以喷射润滑油的喷淋口,令喷淋口朝向齿轮与齿条啮合处。当吊笼经过卡涩区域时,通过喷淋口朝向齿轮与齿条啮合处喷射润滑油,以降低齿轮与齿条之间的阻力。并且,卡涩严重程度等级越高,喷淋口喷出的润滑油的量越多,从而令卡涩处充分润滑。
45.参照图1和图3,s40、判断将根据卡涩情况的不同自动采取程度的润滑措施前后吊笼运行时的阻力大小,对吊笼进行采取紧急措施。
46.s41、获取润滑后的吊笼在卡涩区域内运行时的加速度a3,根据此次吊笼的重量计算出润滑后的阻力f3。
47.获取吊笼再次经过已经经过润滑措施处的标准节时的加速度a3、顶部电机以及侧面电机的输出力f以及吊笼和吊笼内工作人员等总重量m2。计算得出润滑后标准节与吊笼之间的阻力f3,阻力f3为:f3=f-(a3m2+m2g);s42、比较总重量m2与总重量m1的大小是否发生变化,若总重量m2=总重量m1时,则将阻力f3定义为润滑阻力f3’。
48.若总重量m2≠总重量m1时,根据总重量m2与总重量m1比例关系计算出倍数k,由于正常状态下阻力f3中大部分为摩擦力组成,因此将阻力f3等效于摩擦力。由于摩擦力与重量呈正比,电机对吊笼的输出力与重量同样呈正比,此时的润滑阻力f3’=k*阻力f3。
49.s43、比较润滑阻力f3’和阻力f2的大小,判断润滑措施是否有效,润滑措施无效时,对吊笼进行采取紧急措施。
50.具体的,将润滑阻力f3’和阻力f2的数值进行相减,并且计算得到两者之差的绝对值,将此绝对值定义为第二计算值。然后将第二计算值与预设的第二阈值进行比较,判断润滑措施是否有效。若第二计算值小于第二阈值时,则表示润滑措施有效,能够降低吊笼与卡涩区域内的卡涩标准节之间的阻力。
51.若第二计算值大于第二阈值时,则表示润滑措施无效,此时阻力f3’可能是由于标准节倾斜导致齿条错位或者齿条弯曲或者齿条断齿等机械因素主导,紧靠润滑油无法降低的阻力。
52.s44、对吊笼采取紧急措施。紧急措施包括降低顶部电机以及侧面电机的输出功率,降低吊笼的速度以令吊笼以平稳的速度运行,从而降低吊笼在卡涩时对钢缆的拉力。
53.控制顶部电机以及侧面电机反向转动,令吊笼按照原路暂时离开卡涩区域。待吊笼离开卡涩区域后重新按照设定的路线移动,尝试冲击克服卡涩区域对吊笼的阻力。
54.若吊笼经过反向尝试后,依旧无法继续移动时,将此时吊笼与导轨架之间的状态定义为故障状态。停止吊笼对导轨架的冲击。控制顶部电机以及侧面电机将吊笼原路返回,并且在最近的楼层门处停车,打开吊笼的闸门,以便于令吊笼内工作人员逃离吊笼。同时,吊笼停止继续运行发出故障警报以提醒检修人员吊笼出现机械故障无法正常使用。
55.实施例二:
本实施例公开一种施工升降机安全智能控制系统。一种施工升降机安全智能控制系统,包括加速检测模块,用于实时检测吊笼沿着导轨架移动时的加速度数据;重量检测模块,用于获取吊笼以及吊笼内工作人员、工具等总重量;驱动力计算模块,用于计算出顶部电机以及侧面电机作用于吊笼上的输出力;计算模块,用于根据吊笼的总重量、加速度数据、输出力计算出吊笼与标准节之间的阻力,并根据阻力大小将卡涩标准节进行卡涩严重程度标记,控制喷淋口喷射润滑油;润滑油喷淋装置,响应于计算模块的控制信号,从而根据吊笼与标准节之间卡涩严重程度喷射处对应量的润滑油。
56.本具体实施例仅仅是对本发明的解释,其并不是对本发明的限制,本领域技术人员在阅读完本说明书后可以根据需要对本实施例做出没有创造性贡献的修改,但只要在本发明的权利要求范围内都受到专利法的保护。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1