一种工业质检机器人视觉检测及避障系统的制作方法
1.本发明涉及机器人技术领域,具体涉及一种工业质检机器人视觉检测及避障系统。
背景技术:
2.机器人是一种自动化机器,不同的是这种机器具备一些与人或生物相似的智能能力,如感知能力、规划能力、动作能力和协同能力,是一种具有高度灵活性的自动化机器。
3.如中国专利公开号为cn110866901a,该专利文献所公开的技术方案如下:本发明提供一种基于边缘计算技术的质检方法及系统。在一个可能的实施例中,实时拍摄多张待质检产品的质检图片;将拍摄的多张质检图片传送到边缘服务器中;利用深度卷积神经网络的机器学习方法对所述多张质检图片进行处理,并结合检验标准对待质检产品的生产质量进行判断;将待质检产品的生产质量的判断结果进行实时反馈,操作人员可根据反馈结果进行后续操作,达到提升生产线质检效率和提高生产质量的双重效果。同时将工业生产环境中计算和存储业务下放到工厂内部的网络边缘,为工业生产机器人等边缘设备提供就近服务,缩短了工业应用的响应时间。
4.针对现有技术存在以下问题:
5.1、现有技术中在视觉系统检测后,照片需要直接统一存放到电脑相关软件系统内,查看不合格、合格产品照片时,需要工作人员在电脑系统中自己查找,使用不方便、不直观;
6.2、在进行检查中需要对工件进行夹持,在实际使用中往往会夹持不同形状的工件,对于外壁不平整的工件,现今的夹持工具在夹持中往往因夹持贴合面积较小,导致夹持不稳情况。
技术实现要素:
7.本发明提供一种工业质检机器人视觉检测及避障系统,以解决上述背景技术中提出的问题。
8.为解决上述技术问题,本发明所采用的技术方案是:
9.第一方面:一种工业质检机器人视觉检测及避障系统,包括以下步骤:
10.步骤一:设置一个plc,通过plc操控机器人工作,通过机器人来进行控制抓手夹具进行夹持待检测工件;
11.步骤二:通过plc对抓手夹具抓取的工件进行拍照,并通过上位系统对照片结果进行分析,并对合格产品照片和不合格产品照片进行分组存储;
12.步骤三:plc根据照片分析结果控制机器人操作抓手夹具对工件进行分组。
13.本发明技术方案的进一步改进在于:所述步骤二还包括以下步骤:
14.1):设置一显示屏,该显示屏与上位系统相连接,工作人员可直接在显示屏中得知相关情况,同时设置按键,通过操作按键,可直接控制照片播放,即上一张或者下一张。
15.2):设置一电脑,该电脑与上位系统相连接,将合格产品照片和不合格产品照片分别编号,并进行存储至该电脑中,以便工作人员在电脑系统中自己查找,更加方便和直观。
16.本发明技术方案的进一步改进在于:所述步骤二中还包括以下步骤:
17.1):设置一工业按钮,该工业按钮与plc相连接,工业按钮上设置有选择按钮,通过控制按钮,进行选择工件的上下线放置。
18.第二方面:本发明技术方案的进一步改进在于:一种工业质检机器人视觉检测及避障系统使用抓手夹具装置:包括防护筒,所述防护筒的外壁设置有装配箱组件,所述装配箱组件的内壁固定连接有液压杆,所述防护筒的外壁固定连接有连接板,所述连接板的内壁活动连接有连销,所述连接板的外壁通过连销活动连接有活动板,所述活动板的外壁通过连销活动连接有夹板组件,所述液压杆的外壁固定连接与拉把,所述拉把的外壁活动连接有拉杆。
19.本发明技术方案的进一步改进在于:所述夹板组件包括设置在连销外壁的板体,所述板体内壁固定连接有弹簧,所述弹簧的外壁固定连接有弧板,所述弧板的外壁固定连接有橡胶块,所述弧板的外壁固定连接有滑杆,通过该组件的设置,弧板两侧设置的弹簧和橡胶块,可根据工件的形状进行调节与工件的贴合效果,使得接触面积增大的同时,也提高了夹持效果;所述板体的外壁开设有连接孔,且连接孔的内壁与连销的外壁活动连接,以达到便于板体的使用。
20.本发明技术方案的进一步改进在于:所述装配箱组件包括设置在防护筒外壁的箱体,所述箱体的内壁开设有螺纹槽,所述箱体的内壁设置有配电箱,所述箱体的内壁设置有操作门,通过该组件的设置,可为液压杆提供使用动力源的同时,也便于该装置的安装。
21.本发明技术方案的进一步改进在于:所述箱体的内壁设置有弹簧卡梢,且弹簧卡梢的外壁与操作门的内壁活动连接,所述操作门的外壁固定连接有拉环,使得便于使用者操控操作门。
22.本发明技术方案的进一步改进在于:所述箱体的内壁开设有凹槽,凹槽的内壁设置有限位销,且限位销的外壁与配电箱的外壁贴合连接,配电箱两侧限位销的设置,可达到对配电箱有着较好的限位效果。
23.本发明技术方案的进一步改进在于:所述箱体的外壁开设有散热孔,且散热孔向外孔向朝下,使得在具有较好的散热效果的同时,也具有较好的防水和防尘效果。
24.本发明技术方案的进一步改进在于:所述板体的内壁开设有限位滑槽,且限位滑槽的内壁与滑杆的外壁贴合连接,所述夹板组件数量为两个,且每个板体的内壁设置有四个限位滑槽,限位滑槽的设置可达到保持弧板和橡胶块有着较好的限位效果,不易发生位置偏移;所述拉杆外壁的数量为四个,且四个拉杆分别与活动板的外壁活动连接,所述连接板的内壁开设有通孔,且通孔的内壁与拉把的外壁贴合连接,拉把的一端贯穿连接板与液压杆的一端固定连接,液压杆通过拉把和拉杆来实现对夹板组件的操作。
25.由于采用了上述技术方案,本发明相对现有技术来说,取得的技术进步是:
26.1、本发明提供一种工业质检机器人视觉检测及避障系统,采用电脑、上位系统、工业按钮与plc配合,工业按钮与plc相连接,通过工业按钮上选择按钮的操作,在进行选择工件的上下线放置的同时,电脑与合格产品照片和不合格产品照片分别编号,并进行存储至该电脑中,以便工作人员在电脑系统中自己查找,更加方便和直观。
27.2、本发明提供一种工业质检机器人视觉检测及避障系统,提供了一种工业质检机器人视觉检测及避障系统使用抓手夹具装置,采用夹板组件的设置和使用,通过弧板两侧设置的弹簧和橡胶块,可根据工件的形状进行调节与工件的贴合效果,使得接触面积增大的同时,也提高了夹持效果,提高了该装置的使用效果,为使用者提供了便利。
附图说明
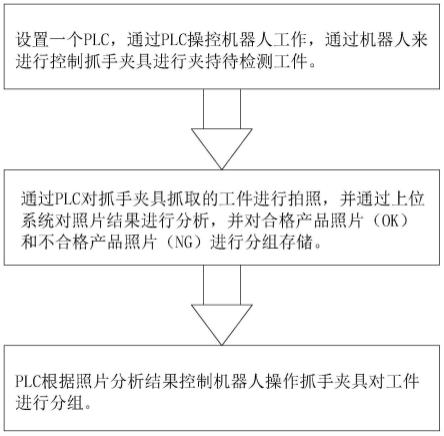
28.图1为本发明视觉检测及避障系统方法流程图;
29.图2为本发明抓手夹具正剖图;
30.图3为本发明抓手夹具主视图;
31.图4为本发明的图2中a处结构示意图;
32.图5为本发明的夹板组件结构示意图;
33.图6为本发明的装配箱组件结构示意图。
34.图中:1、防护筒;2、夹板组件;201、板体;202、滑杆;203、弹簧;204、弧板;205、橡胶块;3、装配箱组件;301、箱体;302、螺纹槽;303、操作门;304、配电箱;4、拉杆;5、连销;6、活动板;7、液压杆;8、拉把;9、连接板。
具体实施方式
35.下面结合实施例对本发明做进一步详细说明:
36.实施例1
37.如图1-6所示,一种工业质检机器人视觉检测及避障系统,包括以下步骤:
38.步骤一:设置一个plc,通过plc操控机器人工作,通过机器人来进行控制抓手夹具进行夹持待检测工件;
39.步骤二:通过plc对抓手夹具抓取的工件进行拍照,并通过上位系统对照片结果进行分析,并对合格产品照片(ok)和不合格产品照片(ng)进行分组存储;
40.步骤三:plc根据照片分析结果控制机器人操作抓手夹具对工件进行分组。
41.所述步骤二还包括以下步骤:
42.1):设置一显示屏,该显示屏与上位系统相连接,工作人员可直接在显示屏中得知相关情况,同时设置按键,通过操作按键,可直接控制照片播放,即上一张或者下一张。
43.2):设置一电脑,该电脑与上位系统相连接,将合格产品照片(ok)和不合格产品照片(ng)分别编号,并进行存储至该电脑中,以便工作人员在电脑系统中自己查找,更加方便和直观。
44.所述步骤二(1)中还包括以下步骤:
45.1):设置一工业按钮,该工业按钮与plc相连接,工业按钮上设置有选择按钮(ok/ng),通过控制按钮,进行选择工件的上下线放置。
46.在本实施例中,采用电脑、上位系统、工业按钮与plc配合,工业按钮与plc相连接,通过工业按钮上选择按钮(ok/ng)的操作,在进行选择工件的上下线放置的同时,电脑与合格产品照片(ok)和不合格产品照片(ng)分别编号,并进行存储至该电脑中,以便工作人员在电脑系统中自己查找,更加方便和直观。
47.实施例2
48.如图1-6所示,在实施例1的基础上,本发明提供一种技术方案:优选的,一种工业质检机器人视觉检测及避障系统使用抓手夹具装置:包括防护筒1,防护筒1的外壁设置有装配箱组件3,装配箱组件3的内壁固定连接有液压杆7,防护筒1的外壁固定连接有连接板9,连接板9的内壁活动连接有连销5,连接板9的外壁通过连销5活动连接有活动板6,活动板6的外壁通过连销5活动连接有夹板组件2,液压杆7的外壁固定连接与拉把8,拉把8的外壁活动连接有拉杆4。
49.装配箱组件3包括设置在防护筒1外壁的箱体301,箱体301的内壁开设有螺纹槽302,箱体301的内壁设置有配电箱304,箱体301的内壁设置有操作门303,通过该组件的设置,可为液压杆7提供使用动力源的同时,也便于该装置的安装。
50.箱体301的内壁设置有弹簧卡梢,且弹簧卡梢的外壁与操作门303的内壁活动连接,操作门303的外壁固定连接有拉环,使得便于使用者操控操作门303。
51.箱体301的内壁开设有凹槽,凹槽的内壁设置有限位销,且限位销的外壁与配电箱304的外壁贴合连接,配电箱304两侧限位销的设置,可达到对配电箱304有着较好的限位效果。
52.箱体301的外壁开设有散热孔,且散热孔向外孔向朝下,使得在具有较好的散热效果的同时,也具有较好的防水和防尘效果。
53.板体201的内壁开设有限位滑槽,且限位滑槽的内壁与滑杆202的外壁贴合连接,夹板组件2数量为两个,且每个板体201的内壁设置有四个限位滑槽,限位滑槽的设置可达到保持弧板204和橡胶块205有着较好的限位效果,不易发生位置偏移,拉杆4外壁的数量为四个,且四个拉杆4分别与活动板6的外壁活动连接,连接板9的内壁开设有通孔,且通孔的内壁与拉把8的外壁贴合连接,拉把8的一端贯穿连接板9与液压杆7的一端固定连接,液压杆7通过拉把8和拉杆4来实现对夹板组件2的操作。
54.在本实施例中,通过该抓手夹具装置的设置,可达到更好的配合工业质检机器人视觉检测及避障系统进行夹持工件的效果。
55.实施例3
56.如图1-6所示,在实施例1的基础上,本发明提供一种技术方案:优选的,夹板组件2包括设置在连销5外壁的板体201,板体201内壁固定连接有弹簧203,弹簧203的外壁固定连接有弧板204,弧板204的外壁固定连接有橡胶块205,弧板204的外壁固定连接有滑杆202,板体201的外壁开设有连接孔,且连接孔的内壁与连销5的外壁活动连接,以达到便于板体201的使用。
57.在本实施例中,通过该组件的设置,弧板204两侧设置的弹簧203和橡胶块205,可根据工件的形状进行调节与工件的贴合效果,使得接触面积增大的同时,也提高了夹持效果。
58.下面具体说一下该工业质检机器人视觉检测及避障系统的工作原理。如图1-6所示,设置一个plc,通过plc操控机器人工作,通过机器人来进行控制抓手夹具进行夹持待检测工件;步骤二:设置一显示屏,该显示屏与上位系统相连接,工作人员可直接在显示屏中得知相关情况,同时设置按键,通过操作按键,可直接控制照片播放,即上一张或者下一张,设置一电脑,该电脑与上位系统相连接,将合格产品照片ok和不合格产品照片ng分别编号,并进行存储至该电脑中,以便工作人员在电脑系统中自己查找,更加方便和直观,设置一工
业按钮,该工业按钮与plc相连接,工业按钮上设置有选择按钮ok/ng,通过控制按钮,进行选择工件的上下线放置,通过plc对抓手夹具抓取的工件进行拍照,并通过上位系统对照片结果进行分析,并对合格产品照片ok和不合格产品照片ng进行分组存储;plc根据照片分析结果控制机器人操作抓手夹具对工件进行分组。
59.上文一般性的对本发明做了详尽的描述,但在本发明基础上,可以对之做一些修改或改进,这对于技术领域的一般技术人员是显而易见的。因此,在不脱离本发明思想精神的修改或改进,均在本发明的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1