一种可联合作业的剪叉平台的制作方法
1.本发明涉及一种剪叉平台,具体涉及一种可联合作业的剪叉平台,适用于电气化线路高空作业领域。
背景技术:
2.铁路及高铁线路上方设接触网,在线路正上方呈“z”字形连续排布,在线路中间特定高度位置上占据一定的连续空间。接触网上面或侧面设线路支撑及隔离辅助设备,对这些设备进行维护需躲开线路接触网后再升至一定高度。目前,常采用臂架式高空作业平台或手工搭建脚手架完成,但存在一些不足。臂架式高空作业平台在起升过程中多会占用线路正上方空间或侧面较大空间,实际操作过程中牺牲了很多空间位置,作业范围连续性差,甚至在某些空间限制较大的特定工况下无法使用。搭建脚手架效率低,人员消耗大,占用线路时间较长。
3.现有高空作业平台多采用以下方案:高空作业平台一般包含伸缩机构、变幅机构、回转机构或其中若干机构组合,底座安装于机车车辆,上部伸缩机构由多节嵌套的臂体组成,臂体间通过油缸或链条、拉索等实现伸缩,实现臂体末端安装的平台在高度或位置上的改变;变幅机构一般通过油缸驱动,通过油缸和臂体形成的三角形状的变化实现载人平台高度位置的直接变化;回转机构采用减速机或油缸带动回转齿轮带动相关机构回转,实现回转以上构件的位置变化。
4.因电气化线路车辆常需要双向行驶,平台在作业时无特定前、后方,为了最大限度覆盖作业范围,高空作业平台布置在机车宽度中心,可兼顾两侧作业。
5.基于躲避线路上方接触网的工作需要,平台及其连接臂架需要在一定程度上转至线路旁,不能侵入到接触网所在的特定高度的连续的空间区域内,一般通过回转或者水平伸缩实现构件及平台向线路侧面的转移,再通过机构将平台送回至线路正上方完成作业,对设备灵活度要求高。
6.这种高空作业平台在避让接触网过程中,通过机构的叠加实现构件及平台向线路侧面的转移,再通过机构将平台送回至线路正上方完成作业,在此过程中,需要有多种机构的组合,占据较大的空间。
7.为了实现平台在轨迹上的往复,整个结构的运动姿态的不断调整,操作过程复杂。
8.在平台开展工作的过程中各级机构不得误入接触网区域,需实时关注各级结构的位置,机构叠加对平台空间位置的判断提出较高要求,控制系统复杂。
9.电气化线路工作空间有限,采用运动往复的平台实现工作,对机构灵活度要求高,平台尺寸受限。
技术实现要素:
10.针对上述现有技术存在的问题,本发明提供一种可联合作业的剪叉平台,通过两个平台独立升降、躲避接触网(特定障碍物后)在高空连接成贯通的大尺寸平台,本可联合
作业的剪叉平台存放及工作过程占用空间小、操作容易、运动轨迹单一,运动过程中构件对周围设备无碰撞或侵入风险。
11.为了实现上述目的,本发明采用的技术方案是:一种可联合作业的剪叉平台,安装在机车车辆上,包括:两个并列剪叉子平台,所述剪叉子平台包括:底座、安装在底座上的剪叉机构以及安装在剪叉机构上的操作平台,底座安装在机车车辆上,通过剪叉机构控制操作平台的升降,两个所述剪叉子平台中的操作平台能组合成一个完成的平台。
12.进一步的,所述剪叉机构端部的一侧铰接在底座和操作平台上,另一侧通过滑动机构安装在底座和操作平台上。
13.进一步的,两个所述剪叉子平台中的剪叉机构铰接和通过滑动机构安装在底座和操作平台上的位置相反。
14.进一步的,所述剪叉机构包括:两组平行设置的剪叉以及连接两组平行剪叉的铰接轴,所述剪叉包括:多组两两相互交叉的剪叉臂体,每个剪叉臂体上设有3个铰接孔,所述两两相互交叉的剪叉臂体与相邻组之间的两两相互交叉的剪叉臂体之间通过铰接轴连接在一起。
15.进一步的,同一所述剪叉子平台的剪叉分别通过转轴与底座、操作平台、滑动机构连接。
16.进一步的,所述滑动机构为滑轨机构、导轨机构、齿轮齿条机构中的一种。
17.进一步的,所述操作平台包括:底板、固定在底板三面的护栏以及铰接在底板第四面的翻折板,所述翻折板下方设有伸出底板侧面的支撑块。
18.进一步的,两个所述操作平台之间还设有防护链。
19.进一步的,剪叉平台中还包括控制剪叉机构工作的伸缩机构。
20.进一步的,所述伸缩机构为液压伸缩缸、伸缩气缸、电动伸缩缸三者中的一种。
21.本发明的有益效果是:结构紧凑、占用空间小,可有效避开接触网区域到达工作区域,平台动作简单、仅需垂直升降即可到达工作位置,操作简单,平台升降过程中臂架结构全部出于平台底部,对平台以外区域无干涉或碰撞风险,两个剪叉子平台间可通过翻折板的延伸行程组成一个大尺寸工作平台、单个剪叉子平台栏杆为半包围结构布置,在平台对接成大平台工作时,平台栏杆也可形成完整防护栏杆。
附图说明
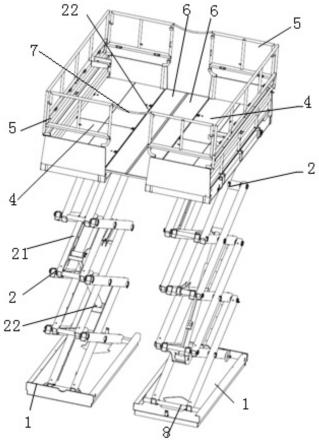
22.图1为本发明的整体结构示意图;图2为本发明的剪叉机构与底座铰接结构示意图;图3为本发明的剪叉机构通过滑轨机构与底座连接结构示意图;图4为本发明的翻折板与底板之间连接结构示意图;图中:1、底座;2、剪叉机构;21、剪叉臂体;22、铰接轴;3、滑轨机构;31、滑槽;32、滑块;4、底板;5、护栏;6、翻折板;7、防护链;8、转轴;9、支撑块。
具体实施方式
23.为使本发明的目的、技术方案和优点更加清楚明了,下面通过附图及实施例,对本发明进行进一步详细说明。但是应该理解,此处所描述的具体实施例仅用以解释本发明,并
不用于限制本发明的范围。
24.除非另有定义,本文所使用的所有的技术术语和科学术语与属于本发明的技术领域的技术人员通常理解的含义相同,本文中在本发明的说明书中所使用的术语只是为了描述具体的实施例的目的,不是旨在于限制本发明。
25.如图1所示,一种可联合作业的剪叉平台,安装在机车车辆上,包括:两个并列剪叉子平台,所述剪叉子平台包括:底座1、安装在底座1上的剪叉机构2以及安装在剪叉机构2上的操作平台,底座1安装在机车车辆上,通过剪叉机构2控制操作平台的升降,两个所述剪叉子平台中的操作平台能组合成一个完成的平台。
26.如图1所示,所述剪叉机构2包括:两组平行设置的剪叉以及连接两组平行剪叉的铰接轴22,所述剪叉包括:多组两两相互交叉的剪叉臂体21,每个剪叉臂体21上设有3个铰接孔,所述两两相互交叉的剪叉臂体21与相邻组之间的两两相互交叉的剪叉臂体21之间通过铰接轴22连接在一起。
27.如图2-3所示,所述剪叉机构2端部的一侧铰接在底座1和操作平台上,另一侧通过滑动机构安装在底座1和操作平台上,铰接位置不会改变,只有与滑动机构连接的一侧移动,在升降过程中和升降后更加稳定。
28.如图1所示,两个所述剪叉子平台中的剪叉机构2铰接和通过滑动机构安装在底座1和操作平台上的位置相反,通过改变两个所述剪叉子平台中的剪叉机构2的移动方向,使其在剪叉子平台组合成一个平台更加稳定。
29.如图3所示,滑轨机构3包括:滑槽31以及设置在滑槽31中的滑块32组成,所述滑轨机构3对称安装在同一底座1上,同一所述剪叉子平台的剪叉分别通过转轴8与底座1、操作平台、滑动机构连接,通过同一转轴8固定两组平行剪叉,使剪叉机构2升降更加同步、稳定。
30.如图1、4所示,所述操作平台包括:底板4、固定在底板4三面的护栏5以及铰接在底板4第四面的翻折板6,所述翻折板6下方设有伸出底板4侧面的支撑块9,所述翻折板6通过铰接轴22安装在底板4侧面,正常状态下翻折板6向上翻折并固定,当做护栏5使用,当两个操作平台组合时,只需要将向上翻折后的翻折板6,向外翻折,使其压在支撑块9上,这样就可以将两个操作平台组合成一个完整的平台。
31.如图1所示,两个所述操作平台之间还设有防护链7,当两个操作平台组合成一个完整的平台时,由于两个翻折后的翻折板6上方的侧面没有护栏5,影响安全,因此增加防护链7,将操作平台之间的护栏5连接在一起,再不需要的时候直接拆除即可,本实例中可以采用挂装的方式进行安装固定,如防护链7的一端焊接在护栏5上,另一端通过搭扣进行固定,不用时只需要松开搭扣即可,也可采用其他易拆装的结构。
32.剪叉平台中还包括控制剪叉机构2工作的伸缩机构,通过伸缩机构可以控制剪叉中夹角的变化,进而使用剪叉机构2的伸缩。
33.所述伸缩机构为液压伸缩缸、伸缩气缸、电动伸缩缸三者中的一种。
34.两个所述操作平台上的翻折板6之间,还可以设置嵌入式结构或可拆卸的连接结构,使两个翻折板6连接成一个整体,嵌入式结构为其中一个翻折板6侧边设有多个凸起,另一个翻折板6侧边上设有与凸起对应的凹槽,可拆卸的连接结构为搭扣、螺栓等可以将两个翻折板6固定在一起的连接结构。
35.所述翻折板6在正常状态为竖直状态,使其在整个平台升降过程中外形不会侵入
到接触网空间,通过剪叉机构2升起至躲避开接触网相同高度后打开翻折板6至水平状态,使操作平台组成一个完整的工作平台。
36.上述中的滑轨机构3还可以采用导轨机构、齿轮齿条机构替换,其中齿轮齿条机构可以增加剪叉机构2的稳定性。
37.也可通过其他机构取代剪叉机构2实现平台的垂直升降,升降机构的构件在升降过程中应不得侵入接触网区域,也可通过其他形式实现平台尺寸的扩大,如伸缩、人工搭建等,其目的均为把两个原本断开的工作平台连接成为一体,形成一个较大尺寸、贯通的大平台。
38.以上所述仅为本发明的较佳实施例而已,并不用以限制本发明,凡在本发明的精神和原则之内所作的任何修改、等同替换或改进等,均应包含在本发明的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1