一种斗轮堆取料机恒流控制系统和方法与流程
本发明属于机械装置领域,具体属于一种斗轮堆取料机恒流控制系统和方法。
背景技术:
1、斗轮堆取料机指的是利用斗轮连续取料,用机上的带式输送机连续堆料的有轨式装卸机械。现有技术中的斗轮堆取料机取料流量控制方式主要为司机人工控制,人为因素干扰较大,取料流量控制不均匀,负荷量时大时小,对后方运料设备冲击较大,不能实现恒定流量高效物料输送。部分斗轮堆取料机虽然可以实现自动化取料控制,但因斗轮堆取料机的运行特性,在料堆内侧取料时负荷较大,当取料悬臂摆到外侧时负荷较小,无法达到恒定流量取料,设备运行效率不高。
技术实现思路
1、为了解决现有技术中存在的问题,本发明提供一种斗轮堆取料机恒流控制系统和方法,以实现斗轮堆取料机恒定流量取料运行,以便降低后方运料系统过负荷风险。
2、为实现上述目的,本发明提供如下技术方案:
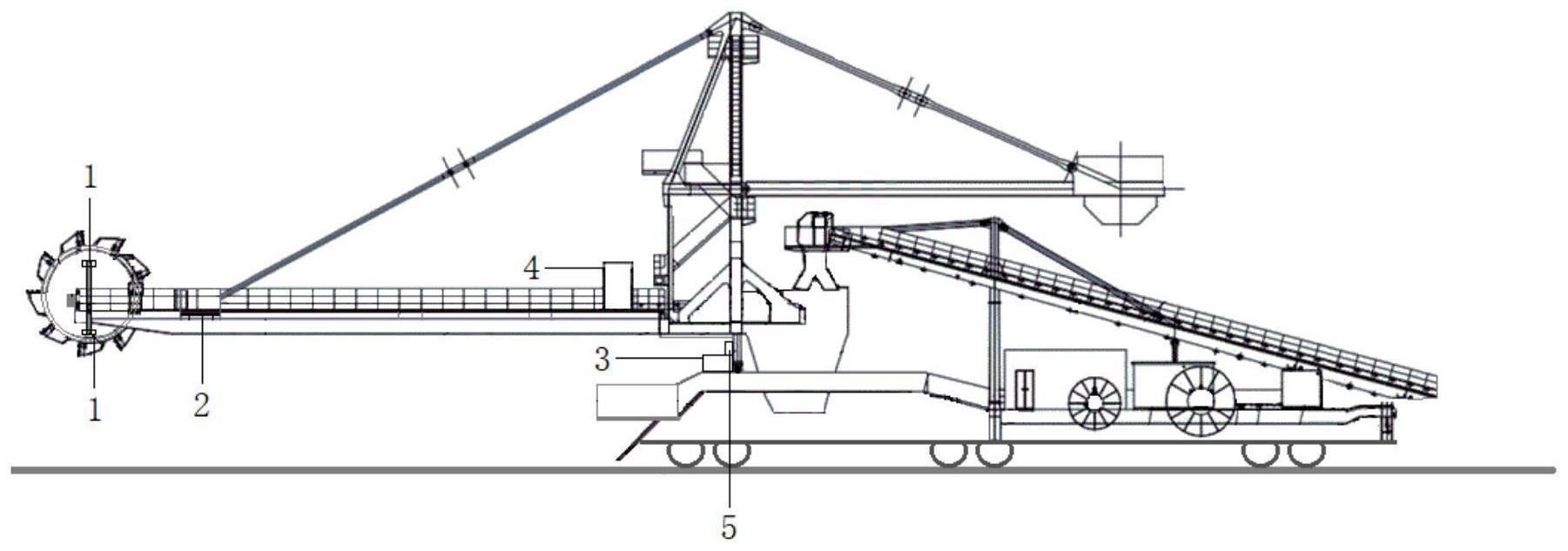
3、一种斗轮堆取料机恒流控制系统,包括超声波雷达、皮带秤、变频旋转电机和取料控制器;
4、所述超声波雷达固定在斗轮堆取料机悬臂的头部,所述皮带秤固定在斗轮堆取料机悬臂上的皮带底部;
5、所述变频旋转电机设置在斗轮堆取料机悬臂旋转齿轮处,变频旋转电机的输出轴传动连接斗轮堆取料机悬臂的旋转齿轮;
6、所述超声波雷达和皮带秤的输出端均连接取料控制器的输入端,所述取料控制器控制变频旋转电机的旋转速度。
7、优选的,还包括角度检测装置,所述角度检测装置设置在斗轮堆取料机悬臂上,用于检测斗轮堆取料机悬臂的旋转角度,角度检测装置的输出端连接取料控制器。
8、优选的,所述斗轮堆取料机悬臂在取料时的旋转角度范围为18°至90°。
9、一种斗轮堆取料机恒流控制方法,包括以下过程,
10、斗轮堆取料机悬臂头部的超声波雷达探测料堆距离,斗轮堆取料机悬臂旋转至料堆内侧起始取料角度,斗轮堆取料机移动向料堆,超声波雷达探测到斗轮堆取料机前进至距料堆预设距离处,此时旋转的斗轮已进入料堆,斗轮堆取料机悬臂开始进行回转取料;
11、斗轮堆取料机悬臂上皮带头部的皮带秤监测料流负荷量,皮带秤将负荷量传输至取料控制器,取料控制器依据皮带秤的负荷量控制变频旋转电机,变频旋转电机控制斗轮堆取料机悬臂的旋转速度,完成斗轮堆取料机的恒定流量控制。
12、优选的,所述超声波雷达与料堆的预设距离小于3米。
13、优选的,当料流负荷量低于预设负荷量,且悬臂旋转角度小于88度时,变频旋转电机的旋转速度增加,加快斗轮堆取料机悬臂的旋转速度。
14、优选的,当料流负荷量高于预设负荷量时,变频旋转电机的旋转速度减小,降低斗轮堆取料机悬臂的旋转速度。
15、优选的,当料流负荷量高于预设负荷量的1.2倍时,变频旋转电机停止转动,斗轮堆取料机悬臂停止旋转5s。
16、优选的,当角度检测装置检测到斗轮堆取料机悬臂的旋转角度到达预设旋转角度范围边界时,变频旋转电机停止转动,斗轮堆取料机移动向料堆,重复取料过程。
17、与现有技术相比,本发明具有以下有益的技术效果:
18、本发明提供一种斗轮堆取料机恒流控制系统,通过在斗轮堆取料机上超声波雷达、皮带秤和变频旋转电机,超声波雷达用于监测斗轮堆取料机的距离,皮带秤用于监测料流负荷量,变频旋转电机用于控制斗轮堆取料机悬臂旋转变频调速,可实现斗轮堆取料机的全自动恒定流量取料控制,节约取料时间,提高生产效率,同时大幅降低后方运料系统的过负荷风险,有助于降低设备的生产维护费用。该套装置结构简单,无需进行大规模设备改造,仅新装设超声波雷达、高精度皮带秤及少量传感元件即可实现自动化功能。整体方案最大限度简化系统构造,构成简捷,同时经济效益较好、对原系统更改较小,结构合理,工作可靠、节省成本,维护方便,便于现场安装改造。
技术特征:
1.一种斗轮堆取料机恒流控制系统,其特征在于,包括超声波雷达(1)、皮带秤(2)、变频旋转电机(3)和取料控制器(4);
2.根据权利要求1所述的一种斗轮堆取料机恒流控制系统,其特征在于,还包括角度检测装置(5),所述角度检测装置(5)设置在斗轮堆取料机悬臂上,用于检测斗轮堆取料机悬臂的旋转角度,角度检测装置(5)的输出端连接取料控制器(4)。
3.根据权利要求1所述的一种斗轮堆取料机恒流控制系统,其特征在于,所述斗轮堆取料机悬臂在取料时的旋转角度范围为18°至90°。
4.一种斗轮堆取料机恒流控制方法,其特征在于,包括以下过程,
5.根据权利要求4所述的一种斗轮堆取料机恒流控制方法,其特征在于,所述超声波雷达(1)与料堆的预设距离小于3米。
6.根据权利要求4所述的一种斗轮堆取料机恒流控制方法,其特征在于,当料流负荷量低于预设负荷量,且悬臂旋转角度小于88度时,变频旋转电机(3)的旋转速度增加,加快斗轮堆取料机悬臂的旋转速度。
7.根据权利要求4所述的一种斗轮堆取料机恒流控制方法,其特征在于,当料流负荷量高于预设负荷量时,变频旋转电机(3)的旋转速度减小,降低斗轮堆取料机悬臂的旋转速度。
8.根据权利要求4所述的一种斗轮堆取料机恒流控制方法,其特征在于,当料流负荷量高于预设负荷量的1.2倍时,变频旋转电机(3)停止转动,斗轮堆取料机悬臂停止旋转5s。
9.根据权利要求4所述的一种斗轮堆取料机恒流控制方法,其特征在于,当角度检测装置(5)检测到斗轮堆取料机悬臂的旋转角度到达预设旋转角度范围边界时,变频旋转电机(3)停止转动,斗轮堆取料机移动向料堆,重复取料过程。
技术总结
本发明公开了一种斗轮堆取料机恒流控制系统和方法,包括超声波雷达、皮带秤、变频旋转电机和取料控制器;所述超声波雷达固定在斗轮堆取料机悬臂的头部,所述皮带秤固定在斗轮堆取料机悬臂上的皮带底部;所述变频旋转电机设置在斗轮堆取料机悬臂旋转齿轮处,变频旋转电机的输出轴传动连接斗轮堆取料机悬臂的旋转齿轮;所述超声波雷达和皮带秤的输出端均连接取料控制器的输入端,所述取料控制器控制变频旋转电机的旋转速度。以实现斗轮堆取料机恒定流量取料运行,以便降低后方运料系统过负荷风险。
技术研发人员:张民,苗维博,李新波,卢占桂,方杰,王世亮,鲁俞伯
受保护的技术使用者:山东日照发电有限公司
技术研发日:
技术公布日:2024/1/12
- 还没有人留言评论。精彩留言会获得点赞!