电梯轿厢称重方法与流程
本发明涉及电梯技术,特别涉及一种电梯轿厢称重方法。
背景技术:
1、当前电梯为了获取好的启动性能及进行超载的判断等,通常配置有电梯轿内负载称量装置,在电梯启动时根据电梯的负载情况,曳引电动机施加对应的转矩,在制动器打开时使电梯轿厢与对重之间受力基本平衡,从而提高电梯启动时的乘坐舒适性。
2、目前行业内关于轿厢负载的称重方法,通常是在轿顶、轿底或钢丝绳的绳头处设置称量传感器,当负载进入轿厢,称量传感器会根据相应器件的形变或受力输出相应信号值,电梯控制系统将根据信号值计算得到轿厢内当前的负载重量,从而电梯启动前需要预先施加轿厢与对重之间不平衡力矩对应的电流,以达到启动的舒适性。
3、随着技术的进步,越来越多的电梯已开始在轿厢上安装绝对位置传感器来检测轿厢的位置,以取代传统门区平层开关、井道终端减速开关、井道终端极限开关以及实现轿厢意外移动保护等安全功能。当轿厢内的负载发生变化时,因为钢丝绳、钢丝绳绳头处的弹簧以及轿厢底部的橡胶块会因为受力的变化而发生相应的形变,导致轿厢的位置发生变化,理论上可以借助这种变化来估算轿厢负载的变化,从而实现传统称量装置的作用,进而取消传统称量装置,实现电梯降本。
4、中国专利文献cn113979256a已公开了通过磁尺传感器实现电梯轿厢的称重,当轿厢内有负载进入后,利用磁尺传感器读取钢丝绳的弹性形变量从而计算得到负载重量。但是,该专利没有考虑钢丝绳的绳头弹簧以及轿底橡胶压块的形变量,仅考虑了钢丝绳的形变,因此该计算方法并不精确,由于越接近顶层区域,钢丝绳的弹性系数越小,在轿厢负载变化导致轿厢位置的变化量中,钢丝绳长度的变化量的占比更小,导致中国专利文献cn113979256a公开的电梯轿厢的称重方案不具有可实施性。
技术实现思路
1、本发明要解决的技术问题是提供一种电梯轿厢称重方法,能快速准确的获得实际电梯轿厢内负载重量变化值。
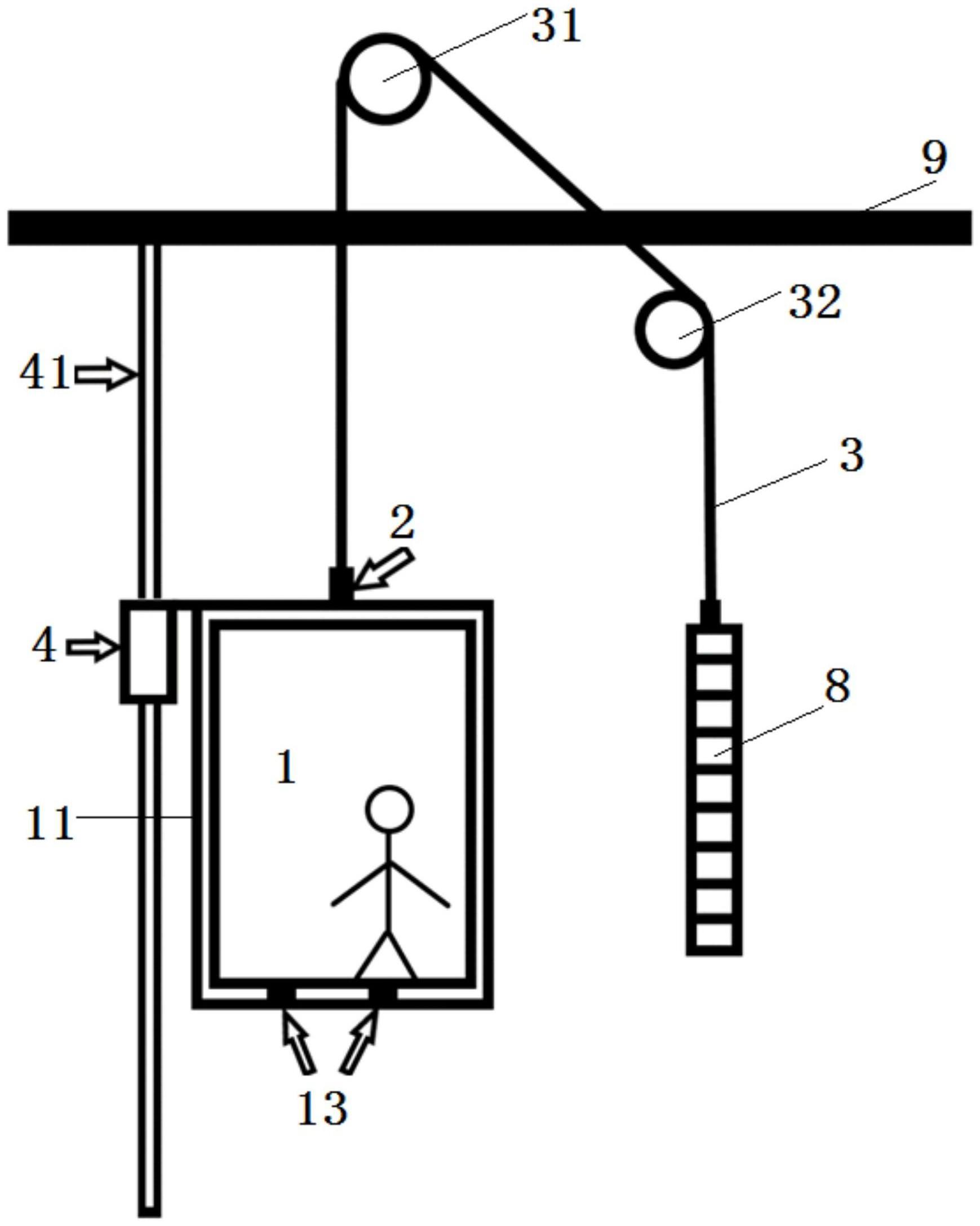
2、为解决上述技术问题,本发明提供的电梯轿厢称重方法,轿厢1及对重8置于井道内,在曳引电机的驱动下,钢丝绳3带动轿厢1及对重8沿竖向反向运动,其通过绝对位置传感器4检测出轿厢1内负载重量变化导致的轿厢负载承载机构的总伸长量δl,通过一控制器根据轿厢负载承载机构的总伸长量δl计算得到轿厢内负载重量变化值δf。
3、较佳的,轿厢1设置在轿厢框架11内;
4、所述绝对位置传感器4安装在轿厢1或轿厢框架11上;
5、以绝对位置传感器4检测的轿厢1内负载重量变化导致的轿厢1或轿厢框架11位置变化量,作为轿厢负载承载机构的总伸长量δl。
6、较佳的,在井道全程安装带有绝对位置编码的栅尺41。
7、较佳的,轿厢1底板同轿厢框架11之间均匀设置有轿底弹性块13。
8、较佳的,所述轿底弹性块13为橡胶块。
9、较佳的,所述绝对位置传感器4安装在轿厢框架11上;
10、所述钢丝绳3的一端通过绳头弹簧2固定连接到轿厢框架11顶部中央,依次绕过曳引电机驱动的曳引轮31及固定在对重8上方的导向轮32,另一端固定连接到对重8顶部中央;
11、控制器根据下式计算得到轿厢内负载重量变化值δf;
12、δfi=δli/(ka+kbi);
13、其中,i为正整数;δfi为电梯轿厢停在i楼平层位置时的轿厢内负载重量变化值;ka为绳头弹簧2的弹性系数,kbi为轿厢在i楼平层位置时的钢丝绳弹性系数;δli为电梯轿厢停在i楼平层位置时轿厢负载承载机构的总伸长量;
14、使曳引轮31固定不动,以轿厢1无负载时绝对位置传感器4检测的轿厢框架11的绝对高度减去轿厢有负载时绝对位置传感器4检测的轿厢框架11的绝对高度的差值,作为电梯轿厢1停在i楼平层位置时轿厢负载承载机构的总伸长量δli;
15、同一规格电梯的绳头弹簧2的弹性系数ka为恒定值。
16、较佳的,轿厢在i楼平层位置时的钢丝绳弹性系数kbi为:
17、kbi=(δlri–δfri*ka)/δfri;
18、n为大于1的整数;i为小于或等于n的正整数;δfri为电梯轿厢停在i楼平层位置时的轿厢内负载重量变化调试值,δlri为电梯轿厢停在i楼平层位置时轿厢负载承载机构的总伸长调试量。
19、较佳的,轿厢在i楼平层位置时的钢丝绳弹性系数kbi通过以下方法获得:
20、在安装调试阶段,根据电梯轿厢停在1楼平层位置时轿厢负载承载机构的总伸长调试量δlr1,以及电梯轿厢停在1楼平层位置时的轿厢内负载重量变化调试值δfr1,计算得到轿厢在1楼平层位置时的钢丝绳弹性系数kb1:kb1=(δlr1-δfr1*ka)/δfr1;根据电梯轿厢停在n楼平层位置时轿厢负载承载机构的总伸长调试量δlrn,以及电梯轿厢停在n楼平层位置时的轿厢内负载重量变化调试值δfrn,计算得到轿厢在n楼平层位置时的钢丝绳弹性系数kbn,kbn=(δlrn–δfrn*ka)/δfrn;
21、然后计算得到轿厢在2楼平层位置到n-1楼平层位置时的钢丝绳弹性系数kbj:
22、kbj=(kbn-kb1)/(ln-l1)*lj+x;
23、x=kbn-(kbn-kb1)/(ln-l1)*ln或者,
24、x=kb1-(kbn-kb1)/(ln-l1)*l1;
25、n为大于1的整数;i小于或等于n的正整数,j为整数2到n-1;
26、x为偏移系数,lj为轿厢在j楼平层位置时的钢丝绳的长度,l1为轿厢在1楼平层位置时的钢丝绳的长度,ln为轿厢在n楼平层位置时的钢丝绳的长度,钢丝绳长度l是轿厢在平层位置时负载放入轿厢前的钢丝绳同曳引轮的轿厢侧切点到绳头弹簧的长度,δfri为电梯轿厢停在i楼平层位置时的轿厢内负载重量变化调试值,δlri为电梯轿厢停在i楼平层位置时轿厢负载承载机构的总伸长调试量。
27、较佳的,在安装调试阶段,当电梯轿厢1停在i楼平层位置时,记录电梯轿厢1内未加负载的曳引电机电流,以及电梯轿厢1内放入负载后电梯轿厢1再次启动上行或下行时的曳引电机电流,根据曳引电机电流的变化量推算出电梯轿厢停在i楼平层位置时的轿厢内负载重量变化调试值δfri,以绝对位置传感器4检测的轿厢1内负载重量变化导致的轿厢框架11位置变化量,作为电梯轿厢停在i楼平层位置时轿厢负载承载机构的总伸长调试量δlri。
28、较佳的,在安装调试阶段,当电梯轿厢1停在i楼平层位置时,将已知重量δfri的负载放入停在i楼平层位置时电梯轿厢1,以绝对位置传感器4检测的轿厢1内负载重量变化导致的轿厢框架11位置变化量,作为电梯轿厢停在i楼平层位置时轿厢负载承载机构的总伸长调试量δlri。
29、较佳的,所述绝对位置传感器4安装在轿厢框架11上;
30、轿厢框架11顶端中央及对重8顶端中央分别固定有滑轮91;
31、所述钢丝绳3的一端通过绳头弹簧2固定连接到井道上端处的横梁9前部,依次绕过轿厢框架11顶端中央滑轮91的下侧、曳引机驱动的曳引轮31、固定在对重8上方的导向轮32、对重8顶端中央滑轮91的下侧,另一端固定连接到横梁9后部;
32、控制器根据下式计算得到轿厢内负载重量变化值δf;
33、δfi=2*δli/(ka+kbi)
34、其中,i为正整数;δfi为电梯轿厢停在i楼平层位置时的轿厢内负载重量变化值;ka为绳头弹簧的弹性系数,kbi为轿厢在i楼平层位置时的钢丝绳弹性系数;δli为电梯轿厢停在i楼平层位置时轿厢负载承载机构的总伸长量;
35、使曳引轮31固定不动,以轿厢1无负载时绝对位置传感器4检测的轿厢框架11的绝对高度减去轿厢有负载时绝对位置传感器4检测的轿厢框架11的绝对高度的差值,作为电梯轿厢1停在i楼平层位置时轿厢负载承载机构的总伸长量δli;
36、同一规格电梯的绳头弹簧的弹性系数ka为恒定值。
37、较佳的,轿厢在i楼平层位置时的钢丝绳弹性系数kbi为:
38、kbi=(2δlri–δfri*ka)/δfri;
39、n为大于1的整数;i为小于或等于n的正整数;δfri为电梯轿厢停在i楼平层位置时的轿厢内负载重量变化调试值,δlri为电梯轿厢停在i楼平层位置时轿厢负载承载机构的总伸长调试量。
40、较佳的,轿厢在i楼平层位置时的钢丝绳弹性系数kbi通过以下方法获得:
41、在安装调试阶段,根据电梯轿厢停在1楼平层位置时轿厢负载承载机构的总伸长调试量δlr1,以及电梯轿厢停在1楼平层位置时的轿厢内负载重量变化调试值δfr1,计算得到轿厢在1楼平层位置时的钢丝绳弹性系数kb1:kb1=(2δlr1-δfr1*ka)/δfr1;根据电梯轿厢停在n楼平层位置时轿厢负载承载机构的总伸长调试量δlrn,,以及电梯轿厢停在n楼平层位置时的轿厢内负载重量变化调试值δfrn,计算得到轿厢在n楼平层位置时的钢丝绳弹性系数kbn,kbn=(2δlrn–δfrn*ka)/δfrn;
42、然后计算得到轿厢在2楼平层位置到n-1楼平层位置时的钢丝绳弹性系数kbj:
43、kbj=(kbn-kb1)/(ln-l1)*lj+x;
44、x=kbn-(kbn-kb1)/(ln-l1)*ln或者,
45、x=kb1-(kbn-kb1)/(ln-l1)*l1;
46、n为大于1的整数;i小于或等于n的正整数,j为整数2到n-1;
47、x为偏移系数,lj为轿厢在j楼平层位置时的钢丝绳的长度,l1为轿厢在1楼平层位置时的钢丝绳的长度,ln为轿厢在n楼平层位置时的钢丝绳的长度,钢丝绳长度l是轿厢在平层位置时负载放入轿厢前的钢丝绳同曳引轮的轿厢侧切点到绳头弹簧的长度,δfri为电梯轿厢停在i楼平层位置时的轿厢内负载重量变化调试值,δlri为电梯轿厢停在i楼平层位置时轿厢负载承载机构的总伸长调试量。
48、较佳的,在安装调试阶段,当电梯轿厢1停在i楼平层位置时,记录电梯轿厢1内未加负载的曳引电机电流,以及电梯轿厢1内放入负载后电梯轿厢1再次启动上行或下行时的曳引电机电流,根据曳引电机电流的变化量推算出电梯轿厢停在i楼平层位置时的轿厢内负载重量变化调试值δfri,以绝对位置传感器4检测的轿厢1内负载重量变化导致的轿厢框架11位置变化量,作为电梯轿厢停在i楼平层位置时轿厢负载承载机构的总伸长调试量δlri。
49、较佳的,在安装调试阶段,当电梯轿厢1停在i楼平层位置时,将已知重量δfri的负载放入停在i楼平层位置时电梯轿厢1,以绝对位置传感器4检测的轿厢1内负载重量变化导致的轿厢框架11位置变化量,作为电梯轿厢停在i楼平层位置时轿厢负载承载机构的总伸长调试量δlri。
50、较佳的,所述绝对位置传感器4安装在轿厢1上;
51、所述钢丝绳3的一端通过绳头弹簧2固定连接到轿厢框架11顶部中央,依次绕过曳引电机驱动的曳引轮31及固定在对重8上方的导向轮32,另一端固定连接到对重8顶部中央;
52、控制器根据下式计算得到轿厢内负载重量变化值δf;
53、δfi=δli/(ka+kbi+kc);
54、其中,i为正整数,δfi为电梯轿厢停在i楼平层位置时的轿厢内负载重量变化值,ka为绳头弹簧的弹性系数,kbi为轿厢在i楼平层位置时的钢丝绳弹性系数;kc为轿底弹性块13的弹性系数,δli为电梯轿厢停在i楼平层位置时轿厢负载承载机构的总伸长量;
55、使曳引轮31固定不动,以轿厢1无负载时绝对位置传感器4检测的轿厢1的绝对高度减去轿厢有负载时绝对位置传感器4检测的轿厢1的绝对高度的差值,作为电梯轿厢1停在i楼平层位置时轿厢负载承载机构的总伸长量δli;
56、同一规格电梯的绳头弹簧的弹性系数ka、轿底弹性块13的弹性系数kc均为恒定值。
57、较佳的,轿厢在i楼平层位置时的钢丝绳弹性系数kbi为:
58、kbi=(2*δlri–δfri*(ka+kc))/δfri;
59、n为大于1的整数;i为小于或等于n的正整数;δfri为电梯轿厢停在i楼平层位置时的轿厢内负载重量变化调试值,δlri为电梯轿厢停在i楼平层位置时轿厢负载承载机构的总伸长调试量。
60、较佳的,轿厢在i楼平层位置时的钢丝绳弹性系数kbi通过以下方法获得:
61、在安装调试阶段,根据电梯轿厢停在1楼平层位置时轿厢负载承载机构的总伸长调试量δlr1,以及电梯轿厢停在1楼平层位置时的轿厢内负载重量变化调试值δfr1,计算得到轿厢在1楼平层位置时的钢丝绳弹性系数kb1:(2*δlr1–δfr1*(ka+kc))/δfr1;根据电梯轿厢停在n楼平层位置时轿厢负载承载机构的总伸长调试量δlrn,以及电梯轿厢停在n楼平层位置时的轿厢内负载重量变化调试值δfrn,计算得到轿厢在n楼平层位置时的钢丝绳弹性系数kbn,kbn=(2*δlrn–δfrn*(ka+kc))/δfrn;
62、然后计算得到轿厢在2楼平层位置到n-1楼平层位置时的钢丝绳弹性系数kbj:
63、kbj=(kbn-kb1)/(ln-l1)*lj+x;
64、x=kbn-(kbn-kb1)/(ln-l1)*ln或者,
65、x=kb1-(kbn-kb1)/(ln-l1)*l1;
66、n为大于1的整数;i小于或等于n的正整数,j为整数2到n-1;
67、x为偏移系数,lj为轿厢在j楼平层位置时的钢丝绳的长度,l1为轿厢在1楼平层位置时的钢丝绳的长度,ln为轿厢在n楼平层位置时的钢丝绳的长度,钢丝绳长度l是轿厢在平层位置时负载放入轿厢前的钢丝绳同曳引轮的轿厢侧切点到绳头弹簧的长度,δfri为电梯轿厢停在i楼平层位置时的轿厢内负载重量变化调试值,δlri为电梯轿厢停在i楼平层位置时轿厢负载承载机构的总伸长调试量。
68、较佳的,在安装调试阶段,当电梯轿厢1停在i楼平层位置时,记录电梯轿厢1内未加负载的曳引电机电流,以及电梯轿厢1内放入负载后电梯轿厢1再次启动上行或下行时的曳引电机电流,根据曳引电机电流的变化量推算出电梯轿厢停在i楼平层位置时的轿厢内负载重量变化调试值δfri,以绝对位置传感器4检测的轿厢1内负载重量变化导致的轿厢1位置变化量,作为电梯轿厢停在i楼平层位置时轿厢负载承载机构的总伸长调试量δlri。
69、较佳的,在安装调试阶段,当电梯轿厢1停在i楼平层位置时,将已知重量δfri的负载放入停在i楼平层位置时电梯轿厢1,以绝对位置传感器4检测的轿厢1内负载重量变化导致的轿厢1位置变化量,作为电梯轿厢停在i楼平层位置时轿厢负载承载机构的总伸长调试量δlri。
70、较佳的,绝对位置传感器4安装在轿厢1上;
71、轿厢框架11顶端中央及对重8顶端中央分别固定有滑轮91;
72、钢丝绳3的一端通过绳头弹簧2固定连接到井道上端处的横梁9前部,依次绕过轿厢框架11顶端中央滑轮91的下侧、曳引机驱动的曳引轮31、固定在对重8上方的导向轮32、对重8顶端中央滑轮91的下侧,另一端固定连接到横梁9后部;
73、控制器根据下式计算得到轿厢内负载重量变化值δf;
74、δfi=2*δli/(ka+kbi+2*kc);
75、其中,i为正整数,δfi为电梯轿厢停在i楼平层位置时的轿厢内负载重量变化值,ka为绳头弹簧的弹性系数,kbi为轿厢在i楼平层位置时的钢丝绳弹性系数;kc为轿底弹性块13的弹性系数,δli为电梯轿厢停在i楼平层位置时轿厢负载承载机构的总伸长量;
76、使曳引轮31固定不动,以轿厢1无负载时绝对位置传感器4检测的轿厢1的绝对高度减去轿厢有负载时绝对位置传感器4检测的轿厢1的绝对高度的差值,作为电梯轿厢1停在i楼平层位置时轿厢负载承载机构的总伸长量δli;
77、同一规格电梯的绳头弹簧的弹性系数ka、轿底弹性块13的弹性系数kc均为恒定值。
78、较佳的,轿厢在i楼平层位置时的钢丝绳弹性系数kbi为:
79、kbi=(2*δlri–δfri*(ka+2*kc))/δfri;
80、n为大于1的整数;i为小于或等于n的正整数;δfri为电梯轿厢停在i楼平层位置时的轿厢内负载重量变化调试值,δlri为电梯轿厢停在i楼平层位置时轿厢负载承载机构的总伸长调试量。
81、较佳的,轿厢在i楼平层位置时的钢丝绳弹性系数kbi通过以下方法获得:
82、在安装调试阶段,根据电梯轿厢停在1楼平层位置时轿厢负载承载机构的总伸长调试量δlr1,以及电梯轿厢停在1楼平层位置时的轿厢内负载重量变化调试值δfr1,计算得到轿厢在1楼平层位置时的钢丝绳弹性系数kb1:(2*δlr1–δfr1*(ka+2*kc))/δfr1;
83、根据电梯轿厢停在n楼平层位置时轿厢负载承载机构的总伸长调试量δlrn,以及电梯轿厢停在n楼平层位置时的轿厢内负载重量变化调试值δfrn,计算得到轿厢在n楼平层位置时的钢丝绳弹性系数kbn,kbn=(2*δlrn–δfrn*(ka+2*kc))/δfrn;
84、然后计算得到轿厢在2楼平层位置到n-1楼平层位置时的钢丝绳弹性系数kbj:
85、kbj=(kbn-kb1)/(ln-l1)*lj+x;
86、x=kbn-(kbn-kb1)/(ln-l1)*ln或者,
87、x=kb1-(kbn-kb1)/(ln-l1)*l1;
88、n为大于1的整数;i小于或等于n的正整数,j为整数2到n-1;
89、x为偏移系数,lj为轿厢在j楼平层位置时的钢丝绳的长度,l1为轿厢在1楼平层位置时的钢丝绳的长度,ln为轿厢在n楼平层位置时的钢丝绳的长度,钢丝绳长度l是轿厢在平层位置时负载放入轿厢前的钢丝绳同曳引轮的轿厢侧切点到绳头弹簧的长度,δfri为电梯轿厢停在i楼平层位置时的轿厢内负载重量变化调试值,δlri为电梯轿厢停在i楼平层位置时轿厢负载承载机构的总伸长调试量。
90、较佳的,在安装调试阶段,当电梯轿厢1停在i楼平层位置时,记录电梯轿厢1内未加负载的曳引电机电流,以及电梯轿厢1内放入负载后电梯轿厢1再次启动上行或下行时的曳引电机电流,根据曳引电机电流的变化量推算出电梯轿厢停在i楼平层位置时的轿厢内负载重量变化调试值δfri,以绝对位置传感器4检测的轿厢1内负载重量变化导致的轿厢1位置变化量,作为电梯轿厢停在i楼平层位置时轿厢负载承载机构的总伸长调试量δlri。
91、较佳的,在安装调试阶段,当电梯轿厢1停在i楼平层位置时,将已知重量δfri的负载放入停在i楼平层位置时电梯轿厢1,以绝对位置传感器4检测的轿厢1内负载重量变化导致的轿厢1位置变化量,作为电梯轿厢停在i楼平层位置时轿厢负载承载机构的总伸长调试量δlri。
92、本发明的电梯轿厢称重方法,因电梯轿厢1内载荷的变化会导致钢丝绳3长度、钢丝绳3绳头处的绳头弹簧2以及轿底弹性块13等轿厢负载承载机构发生形变,当负载进或出轿厢1之后,轿厢1内载荷的重量变化了,轿厢负载承载机构会产生一定量的形变,从而借助绝对位置传感器4可以读取轿厢负载承载机构的总伸长量δl,所以控制器根据轿厢负载承载机构的总伸长量δl(即轿厢1或轿厢框架11的竖向位置变化量),能计算得到轿厢内负载重量变化值δf。该电梯轿厢称重方法,能快速准确的获得实际电梯轿厢内负载重量变化值。
- 还没有人留言评论。精彩留言会获得点赞!