棒状制品预装盒、盘装置的制作方法
1.本发明涉及烟草机械领域,具体的说,涉及了一种棒状制品预装盒、盘装置。
背景技术:
2.卷烟生产过程中,需要用到针对棒状制品的快速预填装技术,其主要目的是为了提升棒状物料的装盒/盘的效率和质量。
3.传统的棒状制品装盒/盘机构,一般只能选择装盒或者装盘,二选一,想要更换承装类型,需要更换相应的结构件或使用不同的设备,不仅费时费力,需要额外的机器,导致成本升高,还十分影响棒状物料生产过程中的自动化程度。
4.另外,传统的棒状物料装盒机构的装载量不能随盒/盘的改变而改变,装盘质量不高,十分影响整个生产线的工作效率。
5.因此,本领域技术人员针对能够快速更换装盒装盘方式、灵活匹配装盒装盘的装载量,提高装盘质量,另外解决空盒/空盘的进入难、易倒伏和易变形等问题,需要提供一种新的改进方案。
技术实现要素:
6.本发明的目的是针对现有技术的不足,从而提供一种能够兼顾装盘和装盒方式、灵活调整装载量、提高装载质量的棒状制品预装盒、盘装置。
7.为了实现上述目的,本发明所采用的技术方案是:一种棒状制品预装盒、盘装置,包括立架、升降机构、空盒/盘夹持机构和棒状制品动态料库;所述升降机构安装于所述立架上并用于驱动所述空盒/盘夹持机构和棒状制品动态料库分别升降或同步升降;所述空盒/盘夹持机构与棒状制品动态料库前后并列设置;所述空盒/盘夹持机构包括空盒夹持机构和空盘夹持机构,所述空盒夹持机构具有左、右夹持机构和底部夹持机构;所述空盘夹持机构设置于所述空盒夹持机构的四角处,并呈现为左侧上下成对、右侧上下成对的对夹形式。
8.基上所述,空盒/盘夹持机构和棒状制品动态料库安装于同一个盒/盘框架中,所述升降机构驱动所述盘/盒框架的升降。
9.基上所述,所述空盒夹持机构的左、右夹持机构分别包括l型夹持板、支撑板、铰链和复位弹簧,所述l型夹持板的直角处通过铰链安装于盒/盘框架上,所述复位弹簧安装于所述l型夹持板的短边处用于驱使所述l型夹持板转动复位,复位状态下,所述l型夹持板的长边与所述支撑板平行并处于夹持状态;所述立架上针对所述l型夹持板的短边一侧设置限位凸轮,所述限位凸轮用于将l型夹持板的短边下压使l型夹持板的长边转动并远离所述支撑板。
10.基上所述,所述左、右夹持机构的l型夹持板的短边上安装一个连接耳,所述限位
凸轮通过连接耳驱动所述左、右夹持机构的l型夹持板的短边下压。
11.基上所述,所述空盒夹持机构的底部夹持机构包括所述左、右夹持机构的全部结构,所述底部夹持机构中的l型夹持板的旋转中心的偏长边一侧安装顶轴,所述顶轴的两端延伸至空盒夹持机构的横向两端并分别安装两个轴承,复位状态下,所述l型夹持板的长边与所述支撑板平行并处于夹持状态;所述立架上针对所述轴承设置顶板,所述顶板与轴承接触并将所述顶轴顶起使l型夹持板的长边转动并远离所述支撑板。
12.基上所述,所述空盒夹持机构的左、右夹持机构和底部夹持机构中的支撑板均为可拆卸结构,装盘模式下,所述空盒夹持机构的左、右夹持机构和底部夹持机构中的支撑板被拆下,所述盘夹持机构包括设置于所述空盒夹持机构两侧的盒/盘框架上的上限位块、下限位块和挡块,所述下限位块的高度固定,所述上限位块的高度可调,所述挡块安装于所述上限位块的内端,所述空盒夹持机构的左、右夹持机构和底部夹持机构中的l型支撑板配合所述上限位块和挡块用于约束料盘。
13.基上所述,所述l型夹持板的远端进盘侧设置有倾坡,所述连接耳面对限位凸轮的一侧设置有倾坡,所述顶板上对应所述顶轴的轴承一侧设置有倾坡。
14.基上所述,所述立架和空盒/盘夹持机构之间设置有用于确定行程高度的行程感应开关。
15.基上所述,所述棒状制品动态料库包括底槽板、左、右侧槽板、连接板和调整轴,所述底槽板的两端分别固定于两块连接板上,所述左、右侧槽板分别通过调整轴安装于两块连接板上,所述左、右侧槽板的底部与底槽板拼接形成动态料库,所述左、右侧槽板的水平间距可通过调整轴调节,所述连接板固定于所述盒/盘框架上。
16.基上所述,所述升降机构为电缸。
17.本发明相对现有技术具有突出的实质性特点和显著的进步,具体的说,本发明具有以下优点:1.本方案设置了装盘和装盒兼备的机构,既可以实现棒状制品的装盒,又可以实现棒状制品的装盘,兼容性强。
18.2.装盒和装盘在切换的过程中,仅需要装卸支撑板这一个零部件,可兼容使用的结构占绝大部分,切换模式简易方便;3.利用左右夹持和底部夹持的方式对纸盒进行夹持固定,防止空盒倒伏和变形。
19.4.随着升降动作的执行,装盒和装盘过程中的l型夹持板可实现自动打开和夹持,伴随装盘/装盒的过程同步动作,有利于自动化;5.上盘/盒的升降动作和承接上游棒状制品的升降动作既可以同步,也可以分别执行,灵活性更高,可适应高速生产;6.针对装盒和装盘分别设置对应的夹持机构和导向机构,解决装盒过程中的定位问题,解决装盘过程中的定位和稳定性问题。
附图说明
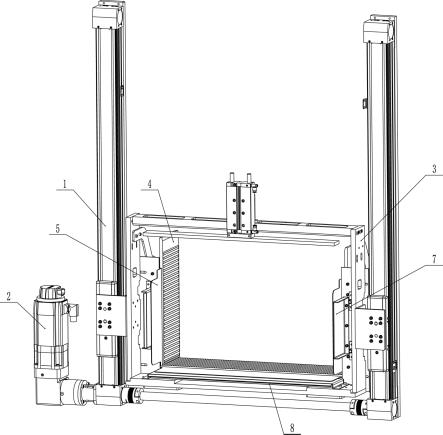
20.图1是本发明中棒状制品预装盒、盘装置在装盒状态下的结构示意图。
21.图2是本发明中棒状制品预装盒、盘装置在装盘状态下的结构示意图。
22.图3是本发明中棒状制品动态料库的结构示意图。
23.图4是本发明中空盒夹持机构中左、右夹持机构的结构示意图。
24.图5是本发明中空盒夹持机构中底部夹持机构的结构示意图。
25.图6是本发明中空盒/盘夹持机构在装盒状态下的的局部结构示意图。
26.图7是本发明中空盒/盘夹持机构在装盘状态下的的局部结构示意图。
27.图8是本发明中棒状制品预装盒、盘装置的运动原理结构示意图。
28.图中:1.立架;2.电缸;3. 盒/盘框架;4.棒状制品动态料库;5.空盒夹持机构;6.空盘夹持机构;7.左、右夹持机构;8.底部夹持机构;41.底槽板;42.左、右侧槽板;43.连接板;44.调整轴;61.上限位块;62.下限位块;63.挡块;71.第一l型夹持板;72.第一支撑板;73.第一铰链;74.第一复位弹簧;75.连接耳;76.限位凸轮;81.第二l型夹持板;82.顶轴;83.轴承;84.顶板;85.第二支撑板;86.第二铰链;87.第二复位弹簧。
具体实施方式
29.下面通过具体实施方式,对本发明的技术方案做进一步的详细描述。
30.实施例1如图1-图8所示,一种棒状制品预装盒、盘装置,包括立架1、电缸2、空盒/盘夹持机构、盒/盘框架3和棒状制品动态料库4,本实施例仅用于棒状制品的装盒。
31.所述电缸2安装于所述立架1上,所述盒/盘框架3安装于电缸2的滑台上,所述空盒/盘夹持机构和棒状制品动态料库4安装在所述盒/盘框架3上,所述电缸2带动盒/盘框架3沿立架1做升降运动。
32.所述空盒/盘夹持机构与棒状制品动态料库4前后并列设置,以方便装盘/盒。
33.具体的,所述空盒/盘夹持机构包括空盒夹持机构5和空盘夹持机构6,所述空盒夹持机构5具有左、右夹持机构7和底部夹持机构8。
34.其中,所述左、右夹持机构7分别包括第一l型夹持板71、第一支撑板72、第一铰链73和第一复位弹簧74,所述第一l型夹持板71的直角处通过第一铰链73安装于盒/盘框架3上,所述第一复位弹簧74安装于所述第一l型夹持板71的短边处用于驱使所述第一l型夹持板71转动复位。
35.复位状态下,所述第一l型夹持板71的长边与所述第一支撑板72平行,并处于夹持状态;所述左、右夹持机构的第一l型夹持板71的短边上安装一个连接耳75,所述立架1上针对所述连接耳75设置限位凸轮76,所述限位凸轮76用于将第一l型夹持板71的短边下压使第一l型夹持板71的长边转动并远离所述第一支撑板72,张开后即可承接上游送来的料盒。
36.所述空盒夹持机构5的底部夹持机构8包括所述左、右夹持机构的全部结构,包括第二l型夹持板81、第二支撑板85、第二铰链86和第二复位弹簧87,所述底部夹持机构中的第二l型夹持板81的旋转中心的偏长边一侧安装顶轴82,所述顶轴82的两端延伸至空盒夹持机构的横向两端并分别安装两个轴承83,复位状态下,所述第二l型夹持板81的长边与第二支撑板85平行并处于夹持状态;所述立架1上针对所述轴承83设置顶板84,所述顶板84与轴承83接触并将所述顶轴82顶起使第二l型夹持板81的长边转动并远离所述第二支撑板
85。
37.所述第一l型夹持板71和第二l型夹持板81的远端进盘侧设置有倾坡,所述连接耳75面对限位凸轮76的一侧设置有倾坡,所述顶板84上对应所述顶轴的轴承83一侧设置有倾坡,倾坡结构用于防止装盒过程中的错位。
38.所述棒状制品动态料库4包括底槽板41、左、右侧槽板42、连接板43和调整轴44,所述底槽板41的两端分别固定于两块连接板43上,所述左、右侧槽板42分别通过调整轴44安装于两块连接板43上,所述左、右侧槽板42的底部与底槽板41拼接形成动态料库,所述左、右侧槽板42的水平间距可通过调整轴44调节,所述连接板固定于所述盒/盘框架3上。
39.工作过程:电缸2驱动盒/盘框架3上升到第一高度,棒状制品动态料库4对上游机构输送的棒状制品进行整理接收,使棒状制品呈规则堆叠;电缸2驱动盒/盘框架3调整到第二高度,与上游的输送纸盒机构对齐,此时限位凸轮76接触连接耳75、轴承83接触顶板84,将第一l型夹持板71和第二l型夹持板81打开,料盒的左右两侧边和底边分别进入第一l型夹持板和第一支撑板之间的间隙中和第二l型夹持板和第二支撑板之间的间隙中;电缸2驱动盒/盘框架3回到低位,与推料机构对齐,由于此时连接耳75离开限位凸轮76、轴承83离开顶板84,第一l型夹持板71和第二l型夹持板81关闭,将料盒夹紧,然后通过推料机构将位于棒状制品动态料库4中的棒状制品平推到料盒中,实现棒状制品的填装;电缸2最后驱动盒/盘框架3移动到满盒推出高度后停止,满盒推出机构将装满棒状制品的纸盒推出,然后进入下一个循环。
40.本实施例中,由于各个动作中的高度是固定的,电缸2自带伺服电机具有较高的行程控制精度,可通过参数设置确定行程。
41.在其它实施例中,可以通过增加行程传感器的方式确定各个环节的行程高度。
42.实施例2本实施例中,所述空盒夹持机构的左、右夹持机构和底部夹持机构中的支撑板均为可拆卸结构,将支撑板拆除。
43.具体的,所述空盘夹持机构设置于所述空盒夹持机构的四角处,并呈现为左侧上下成对、右侧上下成对的对夹形式。
44.所述盘夹持机构6包括设置于所述空盒夹持机构5两侧的盒/盘框架3上的上限位块61、下限位块62和挡块63,所述下限位块62的高度固定,所述上限位块61的高度可调,所述挡块63安装于所述上限位块61的内端,所述空盒夹持机构的左、右夹持机构和底部夹持机构中的第一l型支撑板71和第二l型支撑板81配合所述上限位块61和挡块63用于约束料盘。
45.由于料盘相对纸盒更加厚重,重量问题导致无法通过直接夹持的方式实现固定,故而将支撑板拆除,利用l型支撑板支撑于料盘内部,上限位块61、下限位块62和挡块63构成的外围约束结构用于约束料盘外部,实现对料盘的固定。
46.其它工作过程与实施例1相同。
47.最后应当说明的是:以上实施例仅用以说明本发明的技术方案而非对其限制;尽管参照较佳实施例对本发明进行了详细的说明,所属领域的普通技术人员应当理解:依然
可以对本发明的具体实施方式进行修改或者对部分技术特征进行等同替换;而不脱离本发明技术方案的精神,其均应涵盖在本发明请求保护的技术方案范围当中。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1