一种多元合金成分精调用称量转运系统的制作方法
1.本发明属于熔炼用补料装置技术领域,具体涉及一种多元合金成分精调用称量转运系统。
背景技术:
2.目前在国内大部分铸造车间中,熔炼炉生产中的合金称量、配料、成分调控等工作都是由一线工人手工完成的,在高温、烟尘、震动、噪音等恶劣工作环境下,工人的劳动强度极大,不能保证成分的准确度。成分调控的自动化运行已成为制约铸造生产自动化、铸造管理现代化过程中的一个重要环节。
3.在熔炼环节中,成分粗调后,需在熔体成分在线分析后,对成分进行精调,实现窄区间精确调控。对多元中间合金储料、下料、送料的准确性决定了合金成分配比的准确性,直接关系到合金液体的品质及成本,其自动化程度,又将直接影响熔炼生产的工作强度及生产效率。
4.因此,在熔化的过程中,就需要使用多种元素中间合金小锭块进行成分精调,而目前小锭块的大小和使用量一般都是人工进行测量和计算,工作强度太大,同时也耗时耗力,因此,亟需一种基于多元合金成分精调的称量转运系统技术领域,以解决这类问题。
技术实现要素:
5.本发明的目的是提供一种多元合金成分精调用称量转运系统,用以解决现有技术中存在的上述问题。
6.为了实现上述目的,本发明采用以下技术方案:
7.一种多元合金成分精调用称量转运系统,包括中转运输机、称重运输机、六轴机器人和滑轨,所述中转运输机的输出端对应的设置于称重运输机的运输带上,滑轨设置于称重运输机和熔炉之间,六轴机器人的下端连接于滑台板上,滑台板滑动连接于滑轨上,且滑台板设置有伺服电机,伺服电机的电机轴上设置有位于滑轨一侧的行走轮;所述六轴机器人的机械手上安装有接料斗,六轴机器人能够驱动接料斗接取称重运输机输出的锭块并送入熔炉中;所述滑轨的一侧设置有拖链线槽,拖链线槽内设置有为六轴机器人和伺服电机供电用的电缆拖链,所述滑台板上设置有拖链连接板,电缆拖链的一端连接于拖链连接板上。
8.作为本发明中一种优选的技术方案,所述滑轨顶面的两端均设置有橡胶制成的防撞块,所述滑轨一侧的两端均设置有防撞板;所述滑台板上设置有润滑油壶。
9.作为本发明中一种优选的技术方案,所述中转运输机包括立柱、安装于立柱上的输送带安装框架、安装于输送带安装框架上的输送带以及驱动输送带在输送带安装框架上运转的驱动装置,所述输送带的两侧均设置有挡板,挡板安装于输送带安装框架上。
10.作为本发明中一种优选的技术方案,所述驱动装置安装于输送带安装框架的一端,且驱动装置包括驱动电机、第一安装板、第一轴承座、主动轴和带动输送带运转的第一
链轮,第一安装板设置有两个且两个第一安装板分别安装于输送带安装框架的两侧,驱动电机安装于一个第一安装板上,两个第一安装板上均安装有第一轴承座,主动轴的两端分别安装于两个第一轴承座的旋转内圈上,驱动电机的电机轴通过齿轮箱与主动轴相连接;所述第一链轮安装于主动轴上,输送带的内壁上安装有链条,链条与第一链轮配合连接。
11.作为本发明中一种优选的技术方案,所述输送带安装框架的另一端设置有两个第二安装板,两个第二安装板分别安装于输送带安装框架的两侧,两个第二安装板靠近彼此的一侧均安装有第二轴承座,两个第二轴承座的旋转内圈之间连接有旋转杆,旋转杆上连接有第二链轮,第二链轮与输送带内壁上安装的链条配合连接。
12.作为本发明中一种优选的技术方案,所述立柱设置有至少两个,且每个立柱上安装有工字型支架,两个第二安装板均沿输送带安装框架的长度方向滑动连接于工字型支架上;所述输送带安装框架上安装有两个链轮张紧机构,每个链轮张紧机构与一个第二安装板对应抵接。
13.作为本发明中一种优选的技术方案,所述链轮张紧机构包括l形定位板,l形定位板的一端设置有两个第一螺纹孔,第一螺纹孔内安装有第一螺栓,第一螺栓穿过第一螺纹孔的一端与对应的第二安装板相抵接;所述l形定位板的另一端设置有两个第二螺纹孔,第二螺纹孔内均螺纹连接有第二螺栓,且第二螺栓穿过第二螺纹孔后卡接于输送带安装框架上。
14.作为本发明中一种优选的技术方案,所述链轮张紧机构还包括在输送带安装框架两侧均设置的两个长条定位槽,每个第二螺栓穿过定位第二螺纹孔后均卡接于一个长条定位槽内,且当第二螺栓锁紧时,l形定位板的另一端与输送带安装框架的一侧抵紧,且l形定位板的另一端与输送带安装框架的侧面均为能够加大摩擦的粗糙面。
15.作为本发明中一种优选的技术方案,所述的多元合金成分精调用称量转运系统还包括锭块筛选运输机,锭块筛选运输机设置有至少两个,每个锭块筛选运输机上运输一种重量的锭块,所有的锭块筛选运输机上运输的锭块重量均不同,且所有的锭块筛选运输机的输出端均对应的设置于中转运输机的运输带上。
16.作为本发明中一种优选的技术方案,每个锭块筛选运输机的输送带上均设置有分隔板,相邻的两个分隔板之间形成一个用以放置锭块的锭块放置空间,每个锭块筛选运输机上均设置有用以感应锭块输送数量的红外计数器,每个红外计数器与各自所在的锭块筛选运输机的驱动电机电连接。
17.有益效果:本发明利用中转运输机将小型锭块输送至称重运输机上,在称重运输机上进行称重,进而可以更加精准的进行补料,减少资源的浪费,滑轨设置于称重运输机和熔炉之间,六轴机器人的下端连接于滑台板上,滑台板滑动连接于滑轨上,方便六轴机器人在称重运输机和熔炉之间滑动,六轴机器人的机械手上安装有接料斗,六轴机器人能够驱动接料斗接取称重运输机输出的锭块并送入熔炉中,在中转运输机开始工作时,六轴机器人会控制接料斗设置于称重运输机的输出端,当锭块从称重运输机的输出端下落时,刚好落至接料斗内,然后保证六轴机器人可以稳定且一次性将所有用于补料的小型锭块输送至熔炉中,保证输送过程的稳定性,提高补料的效率,进而实现轻合金熔炼过程中成分不足时的修正,使得轻合金熔炼过程能达到满意的要求;滑轨的一侧设置有拖链线槽,拖链线槽内设置有为六轴机器人和伺服电机供电用的电缆拖链,电缆拖链的一端连接于滑台板上的拖
链连接板上,随着滑台板在滑轨上的滑动,拖链线槽与拖链连接板连接的一端从电缆拖链脱离出来或者重新下落至电缆拖链内,保证六轴机器人和伺服电机的正常供电,对电缆形成保护,防止电缆发生纠缠、磨损、拉脱、挂或散乱的现象。
附图说明
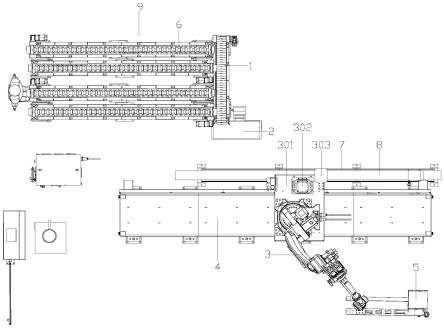
18.图1为本发明的俯视图;
19.图2为本发明的主视图;
20.图3为本发明中滑台板在滑轨上的安装示意图;
21.图4为本发明中中转运输机的结构示意图。
22.图中:1-中转运输机;101-立柱;102-输送带安装框架;103-驱动输送带;104-挡板;105-驱动电机;106-第一安装板;107-第一轴承座;108-主动轴;109-第二安装板;110-第二轴承座;111-工字型支架;112-l形定位板;113-第一螺纹孔;114-第二螺纹孔;115-长条定位槽;2-称重运输机;3-六轴机器人;301-滑台板;302-伺服电机;303-拖链连接板;304-润滑油壶;4-滑轨;401-防撞块;402-防撞板;5-接料斗;6-锭块;7-拖链线槽;8-电缆拖链;9-锭块筛选运输机。
具体实施方式
23.为了更清楚地说明本发明实施例或现有技术中的技术方案,下面将结合附图和实施例或现有技术的描述对本发明作简单地介绍,显而易见地,下面关于附图结构的描述仅仅是本发明的一些实施例,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据这些附图获得其他的附图。在此需要说明的是,对于这些实施例方式的说明用于帮助理解本发明,但并不构成对本发明的限定。
24.实施例:
25.如图1-图4所示,本实施例提供了一种多元合金成分精调用称量转运系统,包括中转运输机1、称重运输机2、六轴机器人3和滑轨4,所述中转运输机1的输出端对应的设置于称重运输机2的运输带上,中转运输机1将小型锭块6输送至称重运输机2上,在称重运输机2上进行称重,进而可以更加精准的进行补料,减少资源的浪费,滑轨4设置于称重运输机2和熔炉之间,六轴机器人3的下端连接于滑台板301上,滑台板301滑动连接于滑轨4上,且滑台板301设置有伺服电机302,伺服电机302的电机轴上设置有位于滑轨4一侧的行走轮,方便六轴机器人3在称重运输机2和熔炉之间滑动,而且六轴机器人3的滑动方式较为常规,设计和制作简单,以方便将称重后的锭块6运输至熔炉处进行补料冶炼使用;所述六轴机器人3的机械手上安装有接料斗5,六轴机器人3能够驱动接料斗5接取称重运输机2输出的锭块6并送入熔炉中,在中转运输机1开始工作时,六轴机器人3会控制接料斗5设置于称重运输机2的输出端,当锭块6从称重运输机2的输出端下落时,刚好落至接料斗5内,然后保证六轴机器人3可以稳定且一次性将所有用于补料的小型锭块6输送至熔炉中,保证输送过程的稳定性,提高补料的效率,进而实现轻合金熔炼过程中成分不足时的修正,使得轻合金熔炼过程能达到满意的要求;所述滑轨4的一侧设置有拖链线槽7,拖链线槽7内设置有为六轴机器人3和伺服电机302供电用的电缆拖链8,所述滑台板301上设置有拖链连接板303,电缆拖链8的一端连接于拖链连接板303上,随着滑台板301在滑轨4上的滑动,拖链线槽7与拖链连接
板303连接的一端从电缆拖链8脱离出来或者重新下落至电缆拖链8内,保证六轴机器人3和伺服电机302的正常供电,对电缆形成保护,防止电缆发生纠缠、磨损、拉脱、挂或散乱的现象。
26.本发明利用中转运输机1将小型锭块6输送至称重运输机2上,在称重运输机2上进行称重,进而可以更加精准的进行补料,减少资源的浪费,滑轨4设置于称重运输机2和熔炉之间,六轴机器人3的下端连接于滑台板301上,滑台板301滑动连接于滑轨4上,方便六轴机器人3在称重运输机2和熔炉之间滑动,六轴机器人3的机械手上安装有接料斗5,六轴机器人3能够驱动接料斗5接取称重运输机2输出的锭块6并送入熔炉中,在中转运输机1开始工作时,六轴机器人3会控制接料斗5设置于称重运输机2的输出端,当锭块6从称重运输机2的输出端下落时,刚好落至接料斗5内,然后保证六轴机器人3可以稳定且一次性将所有用于补料的小型锭块6输送至熔炉中,保证输送过程的稳定性,提高补料的效率,进而实现轻合金熔炼过程中成分不足时的修正,使得轻合金熔炼过程能达到满意的要求;滑轨4的一侧设置有拖链线槽7,拖链线槽7内设置有为六轴机器人3和伺服电机302供电用的电缆拖链8,电缆拖链8的一端连接于滑台板301上的拖链连接板303上,随着滑台板301在滑轨4上的滑动,拖链线槽7与拖链连接板303连接的一端从电缆拖链8脱离出来或者重新下落至电缆拖链8内,保证六轴机器人3和伺服电机302的正常供电,对电缆形成保护,防止电缆发生纠缠、磨损、拉脱、挂或散乱的现象。
27.作为本实施例中一种优选的实施方案,需要进一步说明的是,所述滑轨4顶面的两端均设置有橡胶制成的防撞块401,所述滑轨4一侧的两端均设置有防撞板402,防撞块401与防撞板402均可以起到防撞的效果,作为防护措施,可以使得整个设备的运行更加稳定;所述滑台板301上设置有润滑油壶304,方便对设备进行润滑,保证设备的正常运行。
28.作为本实施例中一种优选的实施方案,需要进一步说明的是,所述中转运输机1包括立柱101、安装于立柱101上的输送带安装框架102、安装于输送带安装框架102上的输送带103以及驱动输送带103在输送带安装框架102上运转的驱动装置,从这里来看,中转运输机1的结构与现有运输机的结构相似,基本的布局和连接方式参考现有技术即可,而其中的输送带103不限制于为皮质制成,也可以是多个金属板连接而成,在现有技术的基础上,所述输送带103的两侧均设置有挡板104,挡板104安装于输送带安装框架102上,进而可以避免锭块6在运输过程中从输送带103上掉落。
29.作为本实施例中一种优选的实施方案,需要进一步说明的是,所述驱动装置安装于输送带安装框架102的一端,且驱动装置包括驱动电机105、第一安装板106、第一轴承座107、主动轴108和带动输送带103运转的第一链轮,第一安装板106设置有两个且两个第一安装板106分别安装于输送带安装框架102的两侧,驱动电机105安装于一个第一安装板106上,保证驱动电机105的稳定性,两个第一安装板106上均安装有第一轴承座107,主动轴108的两端分别安装于两个第一轴承座107的旋转内圈上,保证主动轴108旋转时的灵活性,驱动电机105的电机轴通过齿轮箱与主动轴108相连接,进而可以通过驱动电机105驱动主动轴108旋转;所述第一链轮安装于主动轴108上,输送带103的内壁上安装有链条,链条与第一链轮配合连接,主动轴108旋转带动第一链轮旋转,第一链轮旋转带动安装有链条的输送带103运行。
30.作为本实施例中一种优选的实施方案,需要进一步说明的是,所述输送带安装框
架102的另一端设置有两个第二安装板109,两个第二安装板109分别安装于输送带安装框架102的两侧,两个第二安装板109靠近彼此的一侧均安装有第二轴承座110,两个第二轴承座110的旋转内圈之间连接有旋转杆,进而保证旋转杆转动时的灵活性,旋转杆上连接有第二链轮,第二链轮与输送带103内壁上安装的链条配合连接,链条运动,可以带动第二链轮转动,进而保证输送带103的稳定运行。
31.作为本实施例中一种优选的实施方案,需要进一步说明的是,所述立柱101设置有至少两个,且每个立柱101上安装有工字型支架111,两个第二安装板109均沿输送带安装框架102的长度方向滑动连接于工字型支架111上,保证第二安装板109的稳定性,同时也可以使得第二安装板109能够沿着输送带安装框架102的长度方向进行调整;所述输送带安装框架102上安装有两个链轮张紧机构,每个链轮张紧机构与一个第二安装板109对应抵接,利用链轮张紧机构可以对第二安装板112的位置进行调节,进而调节第二链轮的位置,实现对输送带103的张紧,保证输送带103正常的运输锭块。
32.作为本实施例中一种优选的实施方案,需要进一步说明的是,所述链轮张紧机构包括l形定位板112,l形定位板112的一端设置有两个第一螺纹孔113,第一螺纹孔113内安装有第一螺栓,第一螺栓穿过第一螺纹孔113的一端与对应的第二安装板109相抵接;所述l形定位板112的另一端设置有两个第二螺纹孔114,第二螺纹孔114内均螺纹连接有第二螺栓,且第二螺栓穿过第二螺纹孔114后卡接于输送带安装框架102上,通过第一螺栓可以实现l形定位板112在输送带安装框架102上的定位,然后利用两个第二螺栓对第二安装板109的抵接,对抵接进行调节,实现第二安装板109在输送带安装框架102上的滑动,进而第二安装板109上间接安装的第二链轮能够张紧输送带103,保证输送带103在长久使用的过程中保持稳定的运输效果。需要说明的是,在本实施例中,两个第二安装板是滑动连接于输送带安装框架102上的,两个第二安装板可以相互配合,提高彼此的稳定性。
33.作为本实施例中一种优选的实施方案,需要进一步说明的是,所述链轮张紧机构还包括在输送带安装框架102两侧均设置的两个长条定位槽115,每个第二螺栓穿过定位第二螺纹孔114后均卡接于一个长条定位槽115内,且当第二螺栓锁紧时,l形定位板112的另一端与输送带安装框架102的一侧抵紧,进而通过摩擦力来保证第二螺栓的稳定性,也就可以保证l形定位板112的稳定性,使得l形定位板112可以在输送带安装框架102的一侧自由的移动,且l形定位板112的另一端与输送带安装框架102的侧面均为能够加大摩擦的粗糙面,粗糙面可以加大摩擦力,进而增强l形定位板112的稳定性,间接的保证输送带103的张紧效果。
34.作为本实施例中一种优选的实施方案,需要进一步说明的是,所述的多元合金成分精调用称量转运系统还包括锭块筛选运输机9,锭块筛选运输机9设置有至少两个,每个锭块筛选运输机9上运输一种重量的锭块6,所有的锭块筛选运输机9上运输的锭块6重量均不同,且所有的锭块筛选运输机9的输出端均对应的设置于中转运输机1的运输带上。
35.作为本实施例中一种优选的实施方案,需要进一步说明的是,每个锭块筛选运输机9的输送带上均设置有分隔板,相邻的两个分隔板之间形成一个用以放置锭块6的锭块放置空间,每个锭块筛选运输机9上均设置有用以感应锭块6输送数量的红外计数器,每个红外计数器与各自所在的锭块筛选运输机9的驱动电机电连接,多个锭块筛选运输机9一起运行,分别运输不同大小重量的锭块2,进而可以更加精准的进行补料。
36.最后应说明的是:以上所述仅为本发明的优选实施例而已,并不用于限制本发明的保护范围。凡在本发明的精神和原则之内,所作的任何修改、等同替换、改进等,均应包含在本发明的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1