一种智能汽车用摄像头模组封装设备及封装方法与流程
1.本发明涉及摄像头模组封装技术领域,特别涉及一种智能汽车用摄像头模组封装设备及封装方法。
背景技术:
2.智能汽车就是在一般车辆上增加了先进的传感器(如雷达、摄像头等)、控制器等装置,通过车载环境感知系统和信息终端,实现与人、车、路等的信息交换,其中摄像头为重要的感知器件,摄像头内部结构的组成称为模组,一般是由镜头、音圈马达、镜座、感光芯片及基板组成。
3.在加工摄像头时,需要对摄像头模组进行封装,摄像头模组的封装就是将镜头、音圈马达、镜座、感光芯片及基板从上向下依次粘接,而在摄像头模组进行封装时,镜座上的连接孔与基板上的连接孔连接时的对位较为困难需要一定的时间,导致摄像头模组的封装效率降低,并且常采用从上往下或从下往上的单向依次封装方式,此方式整体的效率较低,同时在封装过程中需要多次实施对位调整,整体效率进一步降低。
技术实现要素:
4.为了解决上述问题,本发明采用以下技术方案,一种智能汽车用摄像头模组封装设备,包括输送机构、固定传送机构与放置组件,输送机构用于对顶部连接有感光芯片的基板进行输送,输送机构的底部设置有底座。
5.固定传送机构,设于底座的顶部,且与输送机构呈十字型排布,用于对顶部连接有音圈马达的镜座进行固定与输送。
6.放置组件,设于固定传送机构上且位于输送机构正上方,用于对镜头进行放置。
7.所述固定传送机构包括底座顶部连接的沿其宽度方向对称布置的两个固定座,两个固定座的顶部均安装有沿底座宽度方向对称布置的顶板,顶板与底座之间转动连接有沿顶板长度方向对称布置的传送轴,同一顶板所连接的两个传送轴通过传送带传动连接,传送带上安装有沿其外侧壁均匀排布的支固架,支固架由与传送带连接的耳板以及耳板顶部连接的匚型板组成,匚型板上安装有定位组件,顶板的底部开设有平衡槽,匚型板的顶部安装有与平衡槽滑动连接的连接座,从而提高匚型板在移动过程中的稳定性,耳板上连接有沿底座宽度方向滑动的推板,推板远离传送带的端面安装有抵板,推板位于传送带上方,抵板与耳板之间连接有位于耳板背对传送带一侧的挤压弹簧,推板远离抵板的端面转动连接有旋转轮,固定座上安装有抵固组件,抵固组件用于推动抵板将镜座固定。
8.优选的,所述定位组件包括匚型板上开设的沿耳板宽度方向对称布置的l型槽,l型槽内滑动连接有贯穿匚型板端部的移动杆,移动杆远离匚型板的一端安装有插杆,插杆靠近移动杆的端面为弧形结构,移动杆上套设有与l型槽相连接的伸缩弹簧,移动杆远离插杆的一端连接有绳索,绳索穿过l型槽并贯穿匚型板后与抵板相连接。
9.优选的,所述抵固组件包括固定座上安装的限位抵架,限位抵架由半弧架与水平
板组成,半弧架为两端弧形中部水平状结构,半弧架位于传送带上方且两侧的弧形结构套设在传送轴上,水平板位于两个传送带的相对侧上方,半弧架靠近固定座的端面安装有沿其长度方向对称布置的气缸,气缸的伸缩端安装有推平板,推平板位于水平板端部与半弧架弧形端之间,水平板与固定座之间的距离小于半弧架的水平段与固定座之间的距离。
10.优选的,所述放置组件包括两个顶板上均安装的支撑板,两个支撑板的相对面均开设有下滑槽,下滑槽内连接有上下滑动的移动块,两个移动块的相对面均安装有电动伸缩杆,电动伸缩杆的伸缩端安装有承接半环。
11.优选的,所述输送机构包括底座顶部安装的沿其长度方向对称布置的固定架,两个固定架的相对面转动连接有沿底座宽度方向对称布置的输送轴,两个输送轴之间通过沿其轴向对称布置的链轮链条传动连接,两个链条的外侧均通过角板连接有均匀排布的承接座,承接座上安装有其长度方向对称布置且呈l型结构的两个限位座,承接座上设置有顶升组件,顶升组件用于对镜架与基板进行定位封装,底座的顶部安装有液压缸,液压缸位于两个固定架以及两个顶板之间。
12.优选的,所述顶升组件包括承接座上开设的承接槽,承接槽位于同个承接座上的两个限位座之间,沿底座长度方向排布的相对应的两个承接槽共同连接有上下滑动的升降板,升降板为工字型结构,升降板底部与承接槽之间通过复位弹簧杆相连接,升降板的顶部安装有沿其长度方向对称布置的定位杆。
13.优选的,所述抵板远离推板的端面安装有防护橡胶垫片。
14.优选的,所述固定座上连接有腰型环。
15.此外,本发明还提供了一种智能汽车用摄像头模组封装方法,包括以下步骤:s1、定位固定:当传送轴间歇停止时,抵固组件不再对旋转轮与推板进行限位,抵板在挤压弹簧的弹力作用下向耳板靠近,使得相对应的两个抵板之间的间距变大,然后将镜座从相对应的两个匚型板的下方放入两个抵板之间,并通过定位组件对放置的镜座进行定位。
16.s2、输送移动:当传送轴带动传送带继续移动时,抵板带动镜座向输送机构移动,在传送带再次间歇停止时,继续将下一个镜座放置在相对应的位置进行固定,然后接着进行输送。
17.s3、上下同步封装:输送机构上传送的基板同样停止移动,然后基板向上移动与镜座底部进行粘接封装,放置组件带动其上放置的镜头向下移动放入镜座上的音圈马达的载体内进行粘接封装,上下同时进行封装。
18.s4、完成取下:在传送带再次间歇停止时,夹持有封装之后的摄像头模组的抵板不再受到抵固组件的限位,两个抵板打开,外部承接设备将封装之后的摄像头模组取下。
19.本发明的有益效果在于:1.本发明所设计的一种智能汽车用摄像头模组封装设备,在对摄像头模组进行封装输送时,通过固定传送机构中的定位组件对镜座的固定位置进行定位,以便于镜座与基板以及镜头连接时可准确对齐,通过使镜头与连接有感光芯片的基板从上下两侧同时与镜座进行连接,节省了摄像头模组的封装时间,从而提高了摄像头模组的封装效率,也避免多步骤封装时需要多次定位造成加工繁琐的问题。
20.2.本发明中的推板推动抵板移动时,使得绳索拉动移动杆与插杆向匚型板移动,从而增加两个传送带上插杆之间的距离,防止插杆在移动过程中发生碰撞。
21.3.本发明中的气缸通过推平板推动相对应的旋转轮与推板移动,直至靠近输送机
构的推平板与旋转轮接触的端面与半弧架远离固定座的端面对齐,以便于推板在移动过程中始终推动抵板,提高镜座在输送移动过程中的平稳性,避免镜座在输送过程中发生震动导致镜座的固定效果不佳的问题。
附图说明
22.下面结合附图和实施例对本发明进一步说明。
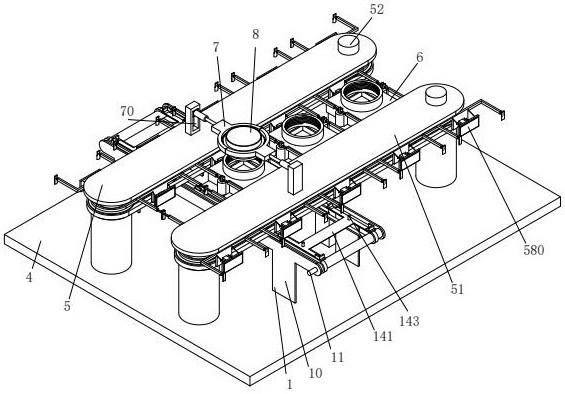
23.图1是本发明的主立体结构示意图。
24.图2是本发明的局部立体结构示意图。
25.图3是本发明图2中的a处放大图。
26.图4是本发明的俯视图。
27.图5是本发明4的b-b向剖视图。
28.图6是本发明图5中的c处放大图。
29.图7是本发明支固架与定位组件的俯向剖视图。
30.图8是本发明承接座与顶升组件的结构示意图。
31.图9是本发明腰型环的结构示意图。
32.图中:1、输送机构;10、固定架;11、输送轴;12、承接座;14、顶升组件;140、承接槽;141、升降板;142、复位弹簧杆;143、定位杆;15、液压缸;16、腰型环;2、基板;3、感光芯片;4、底座;5、固定传送机构;50、固定座;502、半弧架;503、水平板;504、气缸;505、推平板;51、顶板;52、传送轴;53、传送带;54、支固架;540、l型槽;541、移动杆;542、插杆;543、伸缩弹簧;544、绳索;55、平衡槽;56、连接座;57、推板;58、抵板;580、防护橡胶垫片;59、挤压弹簧;501、旋转轮;6、镜座;7、放置组件;70、下滑槽;71、移动块;72、电动伸缩杆;73、承接半环;8、镜头。
具体实施方式
33.以下结合附图对本发明的实施例进行详细说明,但是本发明可以由权利要求限定和覆盖的多种不同方式实施。
34.参阅图1与图5,一种智能汽车用摄像头模组封装设备,包括输送机构1、固定传送机构5与放置组件7,输送机构1用于对顶部连接有感光芯片3的基板2进行输送,输送机构1的底部设置有底座4。
35.固定传送机构5,设于底座4的顶部,且与输送机构1呈十字型排布,用于对顶部连接有音圈马达的镜座6进行固定与输送。
36.放置组件7,设于固定传送机构5上且位于输送机构1正上方,用于对镜头8进行放置。
37.参阅图1、图2、图3与图6,所述固定传送机构5包括底座4顶部连接的沿其宽度方向对称布置的两个固定座50,两个固定座50的顶部均安装有沿底座4宽度方向对称布置的顶板51,顶板51与底座4之间转动连接有沿顶板51长度方向对称布置的传送轴52,同一顶板51所连的两个传送轴52通过传送带53传动连接,传送带53上安装有沿其外侧壁均匀排布的支固架54,支固架54由与传送带53连接的耳板以及耳板顶部连接的匚型板组成,匚型板上安装有定位组件,顶板51的底部开设有平衡槽55,匚型板的顶部安装有与平衡槽55滑动连接
的连接座56,从而提高匚型板在移动过程中的稳定性,耳板上连接有沿底座4宽度方向滑动的推板57,推板57远离传送带53的端面安装有抵板58,推板57位于传送带53上方,抵板58与耳板之间连接有位于耳板背对传送带53一侧的挤压弹簧59,推板57远离抵板58的端面转动连接有旋转轮501,固定座50上安装有抵固组件,抵固组件用于推动抵板58将镜座6固定。
38.顶板51所连接的其中一个传送轴52的上端贯穿顶板51后与外部驱动设备(如带动传送轴52间歇转动的旋转电机)相连接,外部驱动设备相连接的传送轴52在转动的过程中带动传送带53进行移动,当传送轴52间歇停止时,抵固组件不再对旋转轮501与推板57进行限位,抵板58在挤压弹簧59的弹力作用下向耳板靠近,使得相对应的两个抵板58之间的间距变大,然后将镜座6从相对应的两个匚型板的下方放入两个抵板58之间,并通过定位组件对放置的镜座6进行定位,从而确保镜座6与镜头8以及基板2封装时的对位准确度,然后通过抵固组件推动推板57移动,使得推板57带动抵板58向镜座6移动,直至两个抵板58将镜座6夹紧固定。
39.当传送轴52带动传送带53继续移动时,抵板58带动镜座6向输送机构1移动,在传送带53再次间歇停止时,继续将下一个镜座6放置在相对应的位置进行固定,以便于传送带53带动镜座6进行连续封装。
40.而在传送轴52间歇停止时,输送机构1上传送的基板2同样停止移动,然后基板2向上移动与镜座6底部进行粘接封装,放置组件7带动其上放置的镜头8向下移动放入镜座6上的音圈马达的载体内进行粘接封装,上下同时进行封装,从而提高了摄像头模组的封装效率,也避免多步骤封装时需要多次定位造成加工繁琐的问题。
41.之后传送带53带动封装之后的摄像头模组继续移动,在传送带53再次间歇停止时,夹持有封装之后的摄像头模组的抵板58不再受到抵固组件的限位,两个抵板58打开,外部承接设备将封装之后的摄像头模组取下。
42.参阅图2、图3、图4、图5、图6与图7,所述定位组件包括匚型板上开设的沿耳板宽度方向对称布置的l型槽540,l型槽540内滑动连接有贯穿匚型板端部的移动杆541,移动杆541远离匚型板的一端安装有插杆542,插杆542靠近移动杆541的端面为弧形结构,移动杆541上套设有与l型槽540相连接的伸缩弹簧543,移动杆541远离插杆542的一端连接有绳索544,绳索544穿过l型槽540并贯穿匚型板后与抵板58相连接。
43.参阅图1、图2、图3与图6,所述抵固组件包括固定座50上安装的限位抵架,限位抵架由半弧架502与水平板503组成,半弧架502为两端弧形、中部水平状结构,半弧架502位于传送带53上方且两侧的弧形结构套设在传送轴52上,水平板503位于两个传送带53的相对侧上方,半弧架502靠近固定座50的端面安装有沿其长度方向对称布置的气缸504,气缸504的伸缩端安装有推平板505,推平板505位于水平板503端部与半弧架502弧形端之间,水平板503与固定座50之间的距离小于半弧架502的水平段与固定座50之间的距离。
44.靠近输送机构1一侧的气缸504的伸缩距离大于远离输送机构1一侧的气缸504的伸缩距离,当传送带53间歇停止,推板57在挤压弹簧59的复位弹簧作用下位于半弧架502弧形端与水平板503端部之间时,抵板58向耳板靠近,绳索544处于松弛状态,移动杆541在伸缩弹簧543的收缩弹簧力作用下向远离匚型板的方向移动,直至相对的两个插杆542抵紧,然后将镜座6放入两个抵板58之间,插杆542插入镜座6侧边用于与基板2相连接的连接孔内,从而对镜座6的放置进行定位,防止镜座6放入两个抵板58之间时位置不准确,导致镜座
6与镜头8以及基板2的封装效果不佳。
45.之后启动气缸504,气缸504通过推平板505推动相对应的旋转轮501与推板57移动,使得推板57带动抵板58向镜座6移动,抵板58在移动一定距离之后通过绳索544拉动移动杆541与插杆542,当抵板58与镜座6的侧壁抵紧时,插杆542与镜座6的连接孔内壁抵紧,两个抵板58将镜座6夹紧固定,此时远离输送机构1的推平板505与旋转轮501接触的端面与水平板503远离固定座50的端面对齐。
46.当传送带53再次移动时,传送带53带动匚型架移动,旋转轮501沿着推平板505过渡至水平板503上并继续沿水平板503运动,因镜座6得到夹紧后,远离输送机构1的推平板505与旋转轮501接触的端面与水平板503远离固定座50的端面对齐,所以旋转轮501沿水平板503移动期间,镜座6仍处于夹紧状态,从而实现抵板58始终将镜座6夹紧固定的功能。
47.当传送带53带动封装之后的摄像头模组移动停止时,夹持封装之后的摄像头模组的抵板58上连接的推板57脱离水平板503,推板57不再受到挤压力,挤压弹簧59复位,抵板58不再对摄像头模组进行固定,从而将摄像头模组取下。
48.当摄像头模组取下之后,气缸504通过推平板505推动相对应的旋转轮501与推板57移动,直至靠近输送机构1的推平板505与旋转轮501接触的端面与水平板503远离固定座50的端面对齐,以便于推板57在移动过程中始终推动抵板58,而推板57推动抵板58移动时,使得绳索544拉动移动杆541与插杆542向匚型板移动,从而增加两个传送带53上插杆542之间的距离,防止插杆542在移动过程中发生碰撞,旋转轮501减小推板57移动过程中与推平板505以及水平板503之间的摩擦力。
49.参阅图6,所述抵板58远离推板57的端面安装有防护橡胶垫片580,防护橡胶垫片580用于增加抵板58与镜座6之间的摩擦力,同时对镜座6起到防护作用,避免抵板58将镜座6夹持损坏的问题。
50.参阅图6与图9,所述固定座50上连接有腰型环16,腰型环16位于传送带53的底部,用于对传送带53进行承托支撑。
51.参阅图1与图5,所述放置组件7包括两个顶板51上均安装的支撑板,两个支撑板的相对面均开设有下滑槽70,下滑槽70内连接有上下滑动的移动块71,两个移动块71的相对面均安装有电动伸缩杆72,电动伸缩杆72的伸缩端安装有承接半环73。
52.通过电动伸缩杆72推动承接半环73移动直至两个承接半环73抵紧,然后通过机械臂将镜头8放入两个承接半环73之间,之后通过与移动块71相连接的电动滑块带动电动伸缩杆72以及承接半环73向下移动,将镜头8放入镜座6上的音圈马达的载体内进行粘接封装。
53.参阅图1、图5与图8,所述输送机构1包括底座4顶部安装的沿其长度方向对称布置的固定架10,两个固定架10的相对面转动连接有沿底座4宽度方向对称布置的输送轴11,两个输送轴11之间通过沿其轴向对称布置的链轮链条传动连接,两个链条的外侧均通过角板连接有均匀排布的承接座12,承接座12上安装有沿其长度方向对称布置且呈l型结构的两个限位座,承接座12上设置有顶升组件14,顶升组件14用于对镜架与基板2进行定位封装,底座4的顶部安装有液压缸15,液压缸15位于两个固定架10以及两个顶板51之间。
54.参阅图8,所述顶升组件14包括承接座12上开设的承接槽140,承接槽140位于同个承接座12上的两个限位座之间,沿底座4长度方向排布的相对应的两个承接槽140共同连接
有上下滑动的升降板141,升降板141为工字型结构,升降板141底部与承接槽140之间通过复位弹簧杆142相连接,升降板141的顶部安装有沿其长度方向对称布置的定位杆143。
55.其中一个输送轴11的一端贯穿固定架10后与带动其进行间歇转动的外部电机相连接,输送轴11通过链轮与链条的配合带动承接座12移动,在输送轴11间歇停止时,将封装有感光芯片3的基板2放置在升降板141上,并使定位杆143插入基板2的连接孔内,然后通过链轮与链条的配合带动基板2进行移动,当输送轴11再次间歇停止时,基板2与镜座6对齐,然后液压缸15推动升降板141以及升降板141上端放置的基板2向上移动,此时复位弹簧杆142开始拉伸,直至基板2与镜座6的底部紧贴粘接封装,此时定位杆143插入镜座6上的连接孔内,从而确保基板2上的连接孔与镜座6上的连接孔准确对齐封装,最后液压缸15收回,升降板141在复位弹簧杆142的作用下复位,定位杆143从镜座6的连接孔内取出。
56.此外,本发明还提供了一种智能汽车用摄像头模组封装方法,包括以下步骤:s1、定位固定:当传送轴52间歇停止时,抵固组件不再对旋转轮501与推板57进行限位,抵板58在挤压弹簧59的弹力作用下向耳板靠近,使得相对应的两个抵板58之间的间距变大,然后将镜座6从相对应的两个匚型板的下方放入两个抵板58之间,并通过定位组件对放置的镜座6进行定位。
57.s2、输送移动:当传送轴52带动传送带53继续移动时,抵板58带动镜座6向输送机构1移动,在传送带53再次间歇停止时,继续将下一个镜座6放置在相对应的位置进行固定,然后接着进行输送。
58.s3、上下同步封装:输送机构1上传送的基板2同样停止移动,然后基板2向上移动与镜座6底部进行粘接封装,放置组件7带动其上放置的镜头8向下移动放入镜座6上的音圈马达的载体内进行粘接封装,上下同时进行封装。
59.s4、完成取下:在传送带53再次间歇停止时,夹持有封装之后的摄像头模组的抵板58不再受到抵固组件的限位,两个抵板58打开,外部承接设备将封装之后的摄像头模组取下。
60.此外,应当理解,虽然本说明书按照实施方式加以描述,但并非每个实施方式仅包含一个独立的技术方案,说明书的这种叙述方式仅仅是为清楚起见,本领域技术人员应当将说明书作为一个整体,各实施例中的技术方案也可以经适当组合,形成本领域技术人员可以理解的其他实施方式。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1