一种蛋糕生产用封装设备的制作方法
1.本发明属于蛋糕包装技术领域,更具体地说,特别涉及一种蛋糕生产用封装设备。
背景技术:
2.随着各方面的技术的不断发展,工业生产变得越来越简单和高效,自动包装机作为食品行业主流的包装设备也慢慢开始普及起来;自动包装流水线的被包装物料从流水线一端进入,以一定的生产节拍,按照设定的包装工艺顺序,依次经过各个包装工位,通过各工位的包装设备使包装材料与被包装物料实现结合,完成一系列包装工序之后,形成包装成品从流水线的末端不断输出。
3.现有的蛋糕封装设备虽然能够实现对蛋糕的自动封装功能,但封装好的蛋糕运出封装工件后,需要人工将蛋糕摆放整齐并且装箱,操作费时费力,降低了设备的运行效率,同时现有封装设备在面对使用不同尺寸包装箱的需求时,往往需要建立多条生产线来进行不同包装箱的封装,导致建立多个产线所带来的额外生产成本提高。
4.综上,因此本发明提供一种蛋糕生产用封装设备,以解决上述问题。
技术实现要素:
5.为了解决上述技术问题,本发明提供一种蛋糕生产用封装设备,以解决现有的蛋糕塑封后需要人工摆放整齐并且装箱从而降低了工作效率以及不能满足一套设备适用多种包装箱的问题。
6.为解决上述问题,本发明提供如下技术方案:一种蛋糕生产用封装设备,包括:塑封机,所述塑封机的顶部设置有支撑轴,所述塑封机的一侧设置有箱体传送盒一,所述箱体传送盒一的外壁固定连接有箱体传送盒二,所述箱体传送盒二的外壁固定连接有箱体传送盒三,所述箱体传送盒一、箱体传送盒二、箱体传送盒三内部均设置有传送带,所述箱体传送盒一、箱体传送盒二、箱体传送盒三组合在一起呈u型;折叠组件,所述折叠组件包括驱动电机一、传动杆一、推块一、支撑杆一和供纸机,所述驱动电机一固定连接在支撑轴的外壁上,所述传动杆一固定连接在驱动电机一的外壁上,所述推块一与传动杆一的下端转动连接,所述推块一的两端与支撑杆一的上端滑动连接,所述支撑杆一固定连接在箱体传送盒一的外壁上,所述供纸机固定连接在箱体传送盒一的外壁上;放置组件,所述放置组件包括传送机、载物板和吸附机,所述传送机设置在塑封机上且位于箱体传送盒二的上方,所述载物板滑动连接在传送机的外壁上,所述吸附机固定连接在载物板的内壁上;封箱组件,所述封箱组件包括驱动电机二、传动杆二、推块二、支撑杆二和封箱机,所述驱动电机二固定连接在支撑轴的外壁上,所述传动杆二固定连接在驱动电机二的主轴上,所述推块二通过转轴转动连接在传动杆二靠近箱体传送盒三的端部上,所述支撑杆二
固定连接在箱体传送盒三的外壁上,所述封箱机固定连接在推块二的外壁上。
7.进一步的,所述支撑杆一靠近推块一的一侧设置有定型圈,所述定型圈的位置高度低于供纸机出纸口的高度。
8.进一步的,所述推块一的底部固定连接有多个定位杆,所述所述定位杆用来配合定型圈将纸板折成纸箱。
9.进一步的,所述传送机靠近塑封机的一侧上固定连接有伸缩杆一,所述伸缩杆一用来实现传送机水平方向的移动。
10.进一步的,所述载物板靠近传送机的内侧平面固定连接有伸缩杆二,所述伸缩杆二用来实现载物板竖直方向的移动。
11.进一步的,所述吸附机的外壁固定连接有吸嘴,所述吸嘴为软性材料,材料可优选食品用硅胶,为放置蛋糕时提供缓冲作用。
12.进一步的,所述载物板顶部的外壁上设置有距离传感器,所述距离传感器用来判断蛋糕放置位置。
13.进一步的,所述箱体传送盒一、箱体传送盒二和箱体传送盒三的内部均设置有压力传感器,所述压力传感器用于调节箱体传送带的运行。
14.进一步的,所述封箱机的底部设置有滑轨,所述滑轨外壁滑动连接有多个夹块,所述夹块用来对箱子的开口进行封闭。
15.进一步的,所述封箱机的底部设置有红外传感器,所述红外传感器用来检测是否正确封箱,所述红外传感器的数量可优选多个。
16.与现有技术相比,本发明具有如下有益效果:1.本发明所述的一种蛋糕生产用封装设备,通过折叠组件、放置组件、封箱组件和箱体传送带的相互配合,实现了将纸板折成纸箱,将塑封好的蛋糕装箱,将装箱完成的箱子封好的一系列全自动流程;解决了现有封装设备在对蛋糕塑封完成后,需要人工将蛋糕摆放整齐并且装箱的问题,由于蛋糕在塑封完成后自动化装箱,大大减少了装箱所需的时间,提高了设备整体的运行效率。
17.2.本发明所述的一种蛋糕生产用封装设备,通过载物板上的距离传感器与伸缩杆一以及箱体传送带的配合,在装箱前实现对箱子长宽高的扫描,随后自动设定装箱路线,最大化或根据设定利用不同箱子的空间,将其装满;解决了现有封装设备无法适配不同尺寸包装箱的问题,大大扩展了封装设备对不同大小包装的适应性,降低了建立多个产线所带来的额外生产成本。
18.3.本发明所述的一种蛋糕生产用封装设备,通过在箱体传送带内部设置压力传感器,控制箱体传送带的启停与转速,使得封装设备各个组件的协同运行,例如在放置组件进行蛋糕装箱工作时,箱体传送盒二内部的压力传感器检测到持续的压力,由于不需要更多箱子用来打包,便暂停封箱组件的工作,不生产多余的箱子,从而达到精确装箱的效果;解决了现有封装设备人工装箱速度与机器塑封的速度不一致,导致的漏放错放问题,降低了装箱后需要人工核对数量所产生的人工成本。
附图说明
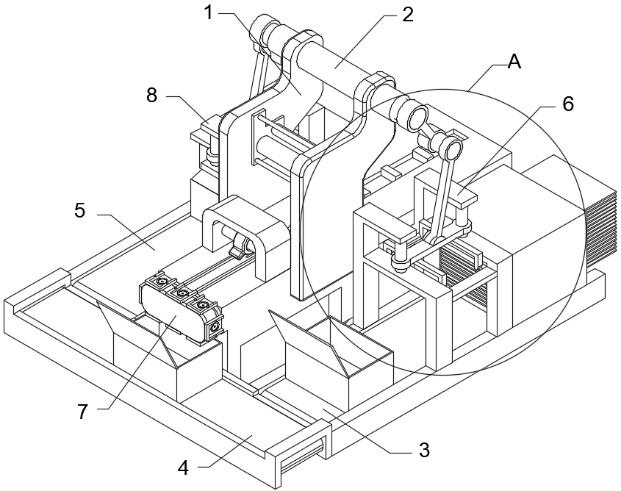
19.图1是本发明折叠组件一侧立体示意图。
20.图2是本发明折叠组件的放大立体示意图。
21.图3是本发明放置组件工作时的立体示意图。
22.图4是本发明放置组件的放大立体示意图。
23.图5是本发明封箱组件一侧立体示意图。
24.图6是本发明封箱组件的放大立体示意图。
25.图7是本发明放置组件的爆炸立体示意图。
26.图中,部件名称与附图编号的对应关系为:1、塑封机;2、支撑轴;3、箱体传送盒一;4、箱体传送盒二;5、箱体传送盒三;6、折叠组件;61、驱动电机一;62、传动杆一;63、推块一;631、定位杆;64、支撑杆一;641、定型圈;65、供纸机;7、放置组件;71、传送机;711、伸缩杆一;72、载物板;721、伸缩杆二;722、吸嘴;723、距离传感器;73、吸附机;8、封箱组件;81、驱动电机二;82、传动杆二;83、推块二;84、支撑杆二;85、封箱机;851、夹块;852、红外传感器。
具体实施方式
27.下面结合附图和实施例对本发明的实施方式作进一步详细描述。以下实施例用于说明本发明,但不能用来限制本发明的范围。
28.本发明提供一种蛋糕生产用封装设备,包括:塑封机1,所述塑封机1的顶部设置有支撑轴2,所述塑封机1的一侧设置有箱体传送盒一3,所述箱体传送盒一3的外壁固定连接有箱体传送盒二4,所述箱体传送盒二4的外壁固定连接有箱体传送盒三5,所述箱体传送盒一3、箱体传送盒二4、箱体传送盒三5内部均设置有传送带,所述箱体传送盒一3、箱体传送盒二4、箱体传送盒三5组合在一起呈u型;折叠组件6,所述折叠组件6包括驱动电机一61、传动杆一62、推块一63、支撑杆一64和供纸机65,所述驱动电机一61固定连接在支撑轴2的外壁上,所述传动杆一62固定连接在驱动电机一61的外壁上,所述推块一63与传动杆一62的下端转动连接,所述推块一63的两端与支撑杆一64的上端滑动连接,所述支撑杆一64固定连接在箱体传送盒一3的外壁上,所述供纸机65固定连接在箱体传送盒一3的外壁上;放置组件7,所述放置组件7包括传送机71、载物板72和吸附机73,所述传送机71设置在塑封机1上且位于箱体传送盒二4的上方,所述载物板72滑动连接在传送机71的外壁上,所述吸附机73固定连接在载物板72的内壁上;封箱组件8,所述封箱组件8包括驱动电机二81、传动杆二82、推块二83、支撑杆二84和封箱机85,所述驱动电机二81固定连接在支撑轴2的外壁上,所述传动杆二82固定连接在驱动电机二81的主轴上,所述推块二83通过转轴转动连接在传动杆二82靠近箱体传送盒三5的端部上,所述支撑杆二84固定连接在箱体传送盒三5的外壁上,所述封箱机85固定连接在推块二83的外壁上。
29.所述支撑杆一64靠近推块一63的一侧设置有定型圈641,所述定型圈641的位置高度低于供纸机65出纸口的高度,使得供纸机65出纸后纸板恰好被定型圈641和支撑杆一64固定在正确的位置。
30.所述推块一63的底部固定连接有多个定位杆631,所述所述定位杆631用来配合定型圈641将纸板折成纸箱。
31.所述传送机71靠近塑封机1的一侧上固定连接有伸缩杆一711,所述伸缩杆一711用来实现传送机71水平方向的移动。
32.所述吸附机73的顶部外壁固定连接有吸嘴722,所述吸嘴722为软性材料,材料可优选食品用硅胶,为放置蛋糕时提供缓冲作用。
33.所述载物板72靠近传送机71的内侧平面固定连接有伸缩杆二721,所述伸缩杆二721用来实现载物板72竖直方向的移动,所述吸附机73采用了真空原理,即用真空负压来“吸附”塑封蛋糕以达到夹持塑封蛋糕的目的,吸附机73的通气口与其内部真空发生装置相接,当真空发生装置启动后,通气口通气,吸嘴722内部的空气被抽走,形成了真空状态,此时由于吸嘴722内部的空气压力低于吸嘴722外部的大气压力,塑封蛋糕在外部压力的作用下被吸起,所述抽风机用来将塑封后的蛋糕暂时吸附在吸附机73上,所述伸缩杆二721和伸缩杆一711配合实现自动摆放蛋糕的效果。
34.所述载物板72的外壁上设置有距离传感器723,所述距离传感器723用来判断蛋糕放置位置。
35.所述箱体传送盒一3、箱体传送盒二4和箱体传送盒三5的内部均设置有压力传感器,所述压力传感器用于调节封装设备各个组件的协同运行,例如在放置组件7进行蛋糕装箱工作时,箱体传送盒二4内部的压力传感器检测到持续的压力,由于不需要更多箱子用来打包,便暂停封箱组件8的工作。
36.所述封箱机85的底部设置有滑轨,所述滑轨外壁滑动连接有多个夹块851,所述夹块851用来对箱子的开口进行封闭。
37.所述封箱机85的底部设置有红外传感器852,所述红外传感器852用来检测是否正确封箱,所述红外传感器852的数量可优选3-5个,通过检测箱子顶部是否为水平状态来判断是否打包完成。
38.实施例1:如图1、图2、图3、图4、图5和图6所示,本实施例中,供纸机65将纸板送出,由于定型圈641的位置高度低于供纸机65出纸口的高度,使纸板恰好被定型圈641和支撑杆一64落在定型圈641的正上方位置,随后驱动电机一61带动传动杆一62转动,使得传动杆一62推动下端的推块一63下移,进而让推块一63下端的定位杆631推动纸板下移,并通过定型圈641,由于纸板上有预先压制的折痕,纸板沿着定型圈641向下滑动时受到定型圈641和定位杆631的推力,被折叠成一个上方敞口的箱子;随后箱子被箱体传送盒一3运送至箱体传送盒二4上,箱体传送盒二4将其运送到放置组件7的正下方,此时在塑封机1里完成塑封的蛋糕被塑封机1上的传送带送至载物板72上并被吸附机73吸住,载物板72开始沿着传送机71上的滑轨滑动,将塑封蛋糕运送至箱子上方,此时通过伸缩杆一711带动传送机71纵向移动,箱体传送盒二4带动箱子横向移动,以及伸缩杆二721带动载物板72向下移动,当载物板72到达指定位置时,吸附机73不再对入箱的塑封蛋糕进行吸附,使得塑封蛋糕被精准放置在箱子内,然后伸缩杆二721带动载物板72向上移动复位,随后放置组件7重复上述装箱动作,由于载物板72上的距离传感器723在装箱前通过测距获取了箱内底部的高度数据,装箱过程中,因为蛋糕堆放其高度会发生变化,伸缩杆一711和伸缩杆二721通过纸箱中的蛋糕堆放高度与箱底高度进行比对,而自动调节伸缩长度,直至将箱子内按顺序整齐装满塑封蛋糕,解决了现有封装设备在对蛋糕塑封完成后,需要人工将蛋糕摆放整齐并且装箱的问题,提高了设备整体的运行效率;
随后箱体传送盒二4将箱子运送至箱体传送盒三5上,箱体传送盒三5将箱子运送至封箱组件8下方,此时驱动电机二81带动传动杆二82做往复运动,转动连接在传动杆二82上的推块二83在向下运动时,推动封箱机85向下移动,封箱机85在移动过程中配合夹块851将箱子封好,在完成一次封箱流程后,封箱机85的底部平均分布的红外传感器852,检测箱子顶面的多个区域是否处于同一高度,从而检测箱子是否被正确封上,如未封好则重复上一封箱流程,直至箱子被正确封上;实现了将纸板折成纸箱,将塑封好的蛋糕装箱,将装箱完成的箱子封好的一系列全自动流程,大大减少了装箱所需的时间,减少了使用人工操作所带来的误差。
39.实施例2:如图3和图4所示,本实施例中,在放置组件7开始对塑封蛋糕进行装箱前,箱体传送盒二4带动箱子左右移动,伸缩杆一711带动载物板72前后移动,由于箱体传送盒二4顶部、箱子内底部以及箱子侧边顶部的高度不同,位于载物板72上的距离传感器723在经过它们上方时会检测到不同的数据,从而确定箱子的尺寸和坐标,封装设备内部的处理器根据此数据规划放置组件7的装箱路线,并控制放置组件7进行实施例1中的装箱步骤,合理利用不同尺寸箱子的空间,将其装满;解决了现有封装设备无法在线实时适配不同尺寸包装箱的问题,大大扩展了封装设备对不同大小包装的适应性,降低了建立多个产线所带来的额外生产成本。
40.实施例3:如图3、图4、图5和图6所示,本实施例中,在放置组件7进行蛋糕装箱工作时,箱体传送盒二4内部的压力传感器检测到持续的压力,随后自动启动塑封机1与放置组件7进行塑封蛋糕的生产与运送,在放置组件7进行蛋糕装箱工作时,由于暂不需要更多箱子用来打包并且暂未完成装箱工作,便暂停折叠组件6和封箱组件8的工作,不生产多余的箱子,从而让组件之间互不干扰,降低封装过程中错误出现的概率,本发明通过在箱体传送带内部设置压力传感器,控制箱体传送带的启停与转速,使得封装设备各个组件的协同运行;解决了现有封装设备人工装箱速度与机器塑封的速度不一致,导致的漏放错放问题,降低了装箱后需要人工核对数量所产生的人工成本。
41.本发明的实施例是为了示例和描述起见而给出的,尽管上面已经示出和描述了本发明的实施例,可以理解的是,上述实施例是示例性的,不能理解为对本发明的限制,本领域的普通技术人员在本发明的范围内可以对上述实施例进行变化、修改、替换和变型。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1