一种自伸缩式翻转倒棱台形爬爪及其使用方法与流程
本技术涉及建筑施工的,尤其是涉及一种自伸缩式翻转倒棱台形爬爪及其使用方法。
背景技术:
1、在现有的超高层办公楼建设施工过程中,塔式起重机是最重要的吊装和垂直运输机械,内爬自升式塔吊因其标准节材料消耗小、对井道的施工环境影响小等优点得到了广泛的使用。
2、目前土建施工中对于重型塔吊的爬升一般通过翻转提升梁来实现,具体来说,就是将塔吊底部提升梁在塔吊爬升后拆除并翻转至最顶部用于下次爬升。
3、为了解决翻转支撑钢梁所带来的相关问题,国内外均做出了相关技术尝试,提出了一种称为免翻梁、免倒梁或自攀爬塔吊的施工方法,由塔吊、为塔吊标准节的上中下三套固定装置及三套连接在建筑物上的可周转支撑装置组成,其中下固定装置与塔吊底部固定。再通过集成于塔身上的吊具逐步提升上、中固定装置为爬升工况与工作工况提供支撑体系。这一种方法无需进行翻运钢梁,其关键在于使用安装在塔吊支撑系统端部的翻转牛腿或伸缩牛腿来实现。
4、在塔吊支撑系统端部安装伸缩牛腿,支撑梁在埋件牛腿的下方向上方移动时,提前缩进伸缩牛腿。在越过埋件牛腿后,伸出伸缩牛腿,再搁置在埋件牛腿的底板上。这种伸缩牛腿的方式在实际施工过程中有一定缺陷,支撑梁牛腿的伸缩需要额外安装液压或电动动力装置,成本高,并且一旦动力系统损坏,检修周期长,影响施工效率。
5、目前常见的翻转牛腿安装在支撑梁的一端,支撑梁与翻转牛腿的尺寸均固定,翻转牛腿可绕销轴进行转动,翻转牛腿在埋件牛腿的下方向上方移动时,碰到埋件牛腿的底板时进行翻转从而可越过埋件牛腿的底板,再超提一段高度后落下,完成整个翻转动作。但其在实际施工过程中存在一定缺陷,一方面仅适用于塔吊所在电梯井道内墙无收分的情况,一旦内墙收分,会导致翻转动作无法完成或支撑梁搁置距离过短。另一方面支撑梁均需超提一段距离才能落位。因此使用局限性较大。
技术实现思路
1、为了减小支撑梁爬爪的成本,提高支撑梁爬爪的检修效率,本技术提供一种自伸缩式翻转倒棱台形爬爪及其使用方法。
2、一方面,本技术提供的一种自伸缩式翻转倒棱台形爬爪采用如下的技术方案:
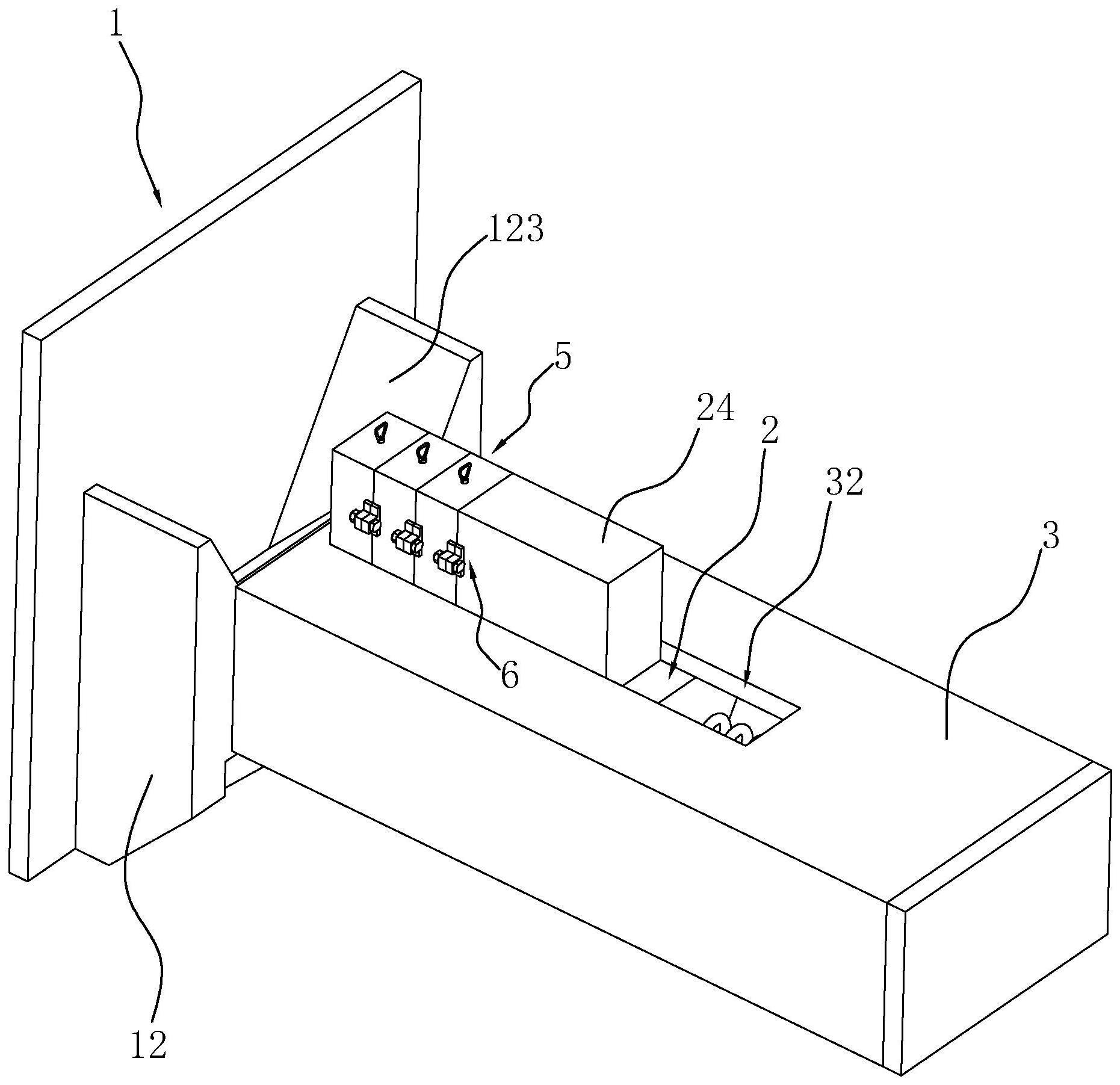
3、一种自伸缩式翻转倒棱台形爬爪,包括多梯形支撑梁基座,所述多梯形支撑梁基座包括背板和与背板固定的安装块,所述安装块上开设有安装槽,所述安装块的一侧设置有倒棱台形爬爪,所述倒棱台形爬爪的一端与所述安装槽榫接;所述安装块远离所述背板的一侧设置有装配式爬爪盒,所述装配式爬爪盒的上表面开设有长条孔,所述装配式爬爪盒靠近所述背板的一端开设有连通孔,所述倒棱台形爬爪远离所述安装块的一端通过所述连通孔插入到所述装配式爬爪盒中,所述倒棱台形爬爪远离所述安装块的一端固定有弹簧,所述弹簧远离所述倒棱台形爬爪的一端与所述装配式爬爪盒的内壁固定,所述倒棱台形爬爪的顶部固定有顶凸块,所述顶凸块伸出所述长条孔;
4、所述安装块的底部倾斜设置,所述安装块的底部从靠近所述背板的一端到所述装配式爬爪盒的一端向所述装配式爬爪盒的方向倾斜;所述倒棱台形爬爪靠近所述背板的一侧为前面,所述前面倾斜设置,所述前面从下到上向远离所述背板的方向倾斜。
5、通过采用上述技术方案,对倒棱台形爬爪进行安装时,提升设备提升塔吊支撑梁和倒棱台形爬爪进行提升,将倒棱台形爬爪提升至多梯形支撑梁基座的正下方,由于凸顶块的限位作用,倒棱台形爬爪的一端被限制在装配式爬爪盒中,在倒棱台形的爬爪提升至与安装块的底部接触时,倒棱台形爬爪开始压缩弹簧,随着倒棱台形爬爪不断地上升,安装块的倾斜面与倒棱台形的前面接触,弹簧不断压缩,当倒棱台形爬爪的底部高于安装槽的底部时,在弹簧弹力的作用下,倒棱台形爬爪的一端插入到安装槽中。通过设计的倒棱台形自伸缩式翻转爬爪实现对体型支撑梁基座垂直方向上的伸缩与落位,无需增加动力装置,从而解决免翻梁、免倒梁或自攀爬塔吊施工工艺中最重要的塔吊支撑梁提升与落位缓解,减小了支撑梁爬爪的成本,同时检修方便。
6、可选的,所述安装槽两个相对的侧面为第一侧面,所述安装槽的底面为搁置面,两个相对的所述第一侧面从上到下向相互靠近的方向倾斜设置,所述倒棱台形爬爪的两个相对的侧面为第二侧面,所述倒棱台形爬爪的底部固定有底板,所述底板与所述搁置面接触,其中一个所述第二侧面与其中一个第一侧面接触,另一个所述第二侧面与另一个第一侧面接触。
7、通过采用上述技术方案,搁置面与两个第一侧面形成“卯”式结构可容纳倒棱台形爬爪,第一侧面形成被动式挡墙使其充分承受到棱台形爬爪带动的动载荷。当倒棱台形爬爪存在偏移时,将倒棱台形爬爪提升到指定高度时,继续向上提升,使倒棱台形爬爪的底板不会被多梯形支撑梁上的第一侧面阻挡,能够完成伸缩式翻转的动作。由于多梯形支撑梁基座的第一侧面倾斜设置,倒棱台形爬爪有着自动向下落位的趋势,直到最后倒棱台形爬爪的底板与搁置面接触。
8、可选的,所述安装块的底部的倾斜面上设置有加劲肋。
9、通过采用上述技术方案,加劲肋便于对倒棱台形爬爪进行挤压,同时减小了安装块底部倾斜面与倒棱台形的前面的接触面积,减小了安装块与倒棱台形的摩擦力。
10、可选的,所述装配式爬爪盒的顶部设置有行程楔组件,所述行程楔组件位于所述顶凸块与所述安装块之间,所述行程楔组件包括多个行程楔,所述行程楔的底部位于所述长条孔中,两个相邻的所述行程楔之间设置有连接组件,两个相邻的所述行程楔之间通过所述连接组件连接固定,靠近所述顶凸块的行程楔与所述顶凸块也通过连接组件连接。
11、通过采用上述技术方案,当剪力墙的墙体发生一个行程楔行程的收分时,倒棱台形爬爪初始的搁置长度已经不能满足要求,对倒棱台形爬爪进行提升前,需要将距离背板最近的一个行程楔取下,之后再对倒棱台形爬爪进行提升,当倒棱台形爬爪上升到安装槽的位置时,在弹簧的作用下,倒棱台形爬爪伸出装配式爬爪盒的长度与倒棱台形爬爪原始伸出装配式爬爪盒的长度多出一个行程楔的长度,所以说倒棱台形爬爪的搁置长度不会发生变化。通过行程楔组件能够使倒棱台形爬爪实现对任意墙体的自适应性,无需进行改造,适应更大的范围,收分情况更复杂的超高层建筑电梯井道。
12、可选的,所述连接组件包括第一连接块和第二连接块,所述第一连接块与其中一个所述行程楔的侧壁固定,所述第二连接块与另一个所述行程楔的侧壁固定,所述第一连接块与所述第二连接块通过螺栓组固定。
13、通过采用上述技术方案,通过螺栓组、第一连接块和第二连接块将相邻的两个行程楔进行固定,便于对行程楔进行安装和拆卸。
14、可选的,所述行程楔的顶部固定有吊环。
15、通过采用上述技术方案,当对行程楔进行拆卸时,先将行程楔上的螺栓组拆下,之后通过提升组件吊起吊环,将行程楔取出。
16、另一方面,本技术提供一种自伸缩式翻转倒棱台形爬爪的使用方法,包括如下步骤:
17、倒棱台形爬爪通过提升设备提升塔吊支撑梁而被提升至多梯形支撑梁基座的正下方,由于顶凸块与行程楔的限位作用,倒棱台形爬爪处于端部限位状态,超重承载力弹簧处于初始压缩状态;
18、倒棱台形爬爪继续被提升,倒棱台形爬爪的前面已经接触到多梯形支撑梁基座的加劲肋,超重承载力弹簧准备进入压缩过程状态,准备进入伸缩式翻转的前动作;
19、继续提升倒棱台形爬爪,由于倒棱台形爬爪的前面板与多梯形支撑梁基座的加劲肋之间的阻力,推动超重承载力弹簧过程停留在压缩过程状态,通过收缩逐步完成伸缩式翻转的前动作;
20、倒棱台形爬爪即将收缩到位,伸缩式翻转前动作完成;
21、倒棱台形爬爪已经收缩到位,超重承载力弹簧过程进入回弹状态,倒棱台形爬爪逐步伸出,进行伸缩式翻转的后动作;
22、倒棱台形爬爪已经伸出到位,倒棱台形爬爪回到初始的限位状态,超重承载力弹簧回到初始压缩状态,倒棱台形爬爪已经搁置于多梯形支撑梁基座的搁置面上,且侧面和多梯形支撑梁基座的被动式侧板已经接触固定,伸缩式翻转的后动作完成;
23、如此循环往复,直至完成整个塔吊的免翻梁或免倒梁提升。
24、综上所述,本技术包括以下至少一种有益技术效果:
25、1.通过设计的倒棱台形自伸缩式翻转爬爪实现对体型支撑梁基座垂直方向上的伸缩与落位,无需增加动力装置,从而解决免翻梁、免倒梁或自攀爬塔吊施工工艺中最重要的塔吊支撑梁提升与落位缓解,减小了支撑梁爬爪的成本,同时检修方便;
26、2.通过行程楔组件能够使倒棱台形爬爪实现对任意墙体的自适应性,无需进行改造,适应更大的范围,收分情况更复杂的超高层建筑电梯井道;
27、3.本技术通过多梯形支撑梁基座和到棱台形爬爪进行卯榫配合,使得爬爪水平方向上有所倾斜时也能成功落位在多梯形支撑梁基座上,无需使用焊接或者螺栓连接对二者进行固定,节约了施工成本,减少了施工人员需要操作的步骤,提高施工效率,进一步增加了塔吊免翻梁、免倒梁直升的安全性;
28、4.本技术可利用装配式爬爪盒的设计实现对不同形式支撑梁的通用,便于在不同工程塔吊之间进行周转,具有较好的经济效益。
- 还没有人留言评论。精彩留言会获得点赞!