一种多通道点数供料装置的制作方法
1.本技术涉及运输装置的技术领域,尤其是涉及一种多通道点数供料装置。
背景技术:
2.在工业领域中,很多时候需要通过供料装置为下一步工作进行机械供料,振动盘和送料器是比较常用的供料装置。在供料装置之前还有的需要将物料清点出确定的数量,即为点数。
3.在食品工业包装行业,点数装置和供料装置是分开的。点数装置设置在供料装置之前,将待包装物清点特定数量后,再流转到供料装置,对下一个工序供料。
4.上述技术中,对于易碎的薄片状食品来说,流转进越多的装置,食品碎裂的可能性就越高,而且常规的振动盘和送料器更是加速易碎食品的碎裂。另外,高档的薄片状易碎食品包装要求片状食品有序排列,且每个包装中的产品有特定数量的要求。因此,提供一种流转过程简单,无振动,点数方便,有序排列待包装物的供料装置很有必要。
技术实现要素:
5.为了便于点数、使待包装物经过尽可能少的流程实现有序排列,本技术提供一种多通道点数供料装置,采用如下的技术方案实现。
6.一种多通道点数供料装置包括:包括:点数滚筒、与点数滚筒同轴设置的点数盘和点数传感器,所述点数滚筒周向设有多个点数单轴,所述点数单轴的轴线方向与所述点数滚筒轴向方向相同,所述点数盘上周向设有点数凸齿,每个所述点数单轴与所述点数凸齿一一对应,所述点数传感器固设在机架的所述点数凸齿的运动轨迹上。
7.通过采用上述技术方案,点数滚筒对待包装物点数,点数滚筒上轴向设有点数单轴,每个点数单轴对应一个点数齿,每个点数轴上设有点数拨叉,每个点数拨叉带动一个待包装物。因此一个待包装物对应一个点数拨叉,对应一个点数单轴,对应一个点数齿,对应点数传感器就会计数一次。由于同步供料装置已经将每个输料皮带的待包装物都有间距的分开,且同频同步,从而保证每个点数拨叉都能在相同的时刻带走一个待包装物。同步供料和点数结构的设置协同作用实现对待包装物的同步供料点数包装。
8.优选的,所述点数滚筒包括点数总轴和与点数总轴同轴设置的点数转盘,所述点数转盘设有通孔,所述点数单轴穿设于所述通孔中。
9.通过采用上述技术方案,点数滚筒通过点数单轴运转带动待包装物,点数单轴在点数滚筒上是通过点数转盘上的通孔定位的,点数单轴整体的在点数滚筒上能够以点数总轴为轴做圆周运动,从而实现将待包装物由承料轨的水平位置提升至转料轨位置。
10.优选的,所述点数单轴上设有点数拨叉,所述点数拨叉用于承载待包装物。
11.通过采用上述技术方案,每个点数单轴上安装有多个点数拨叉,点数拨叉随点数单轴的运动而运动,通过点数拨叉将待包装物转运。
12.优选的,所述点数拨叉包括置料台和推料杆,所述堆料杆为u形。
13.通过采用上述技术方案,点数拨叉通过推料杆将待包装物插取过来,使待包装物放置在点数拨叉的置料台上,保证待包装物的平稳转移。
14.优选的,所述通孔沿轴向设置,所述通孔有多个,多个所述通孔沿所述点数转盘轴向阵列设置。
15.通过采用上述技术方案,点数滚筒圆周上设有多少个点数单轴,点数滚筒完成一周的运动就能提供多少供料的待包装物。阵列设置的通孔能够放置阵列设置的点数单轴,保证点数滚筒能够匀速平稳的供料。
16.优选的,在所述点数转盘远离点数单轴的一侧设置有控叉定盘,所述控叉定盘靠近所述点数转盘的一侧设有控叉滑槽,所述点数单轴的端部固接有控叉转杆,所述控叉转杆的另一端滑移连接在所述控叉滑槽内。
17.通过采用上述技术方案,在点数拨叉和转料轨交接处,点数拨叉逐渐脱离与待包装物的接触,设置控叉定盘,控制点数单轴沿其自身为轴线的旋转运动,使点数单轴在沿着点数总轴公转的同时,又沿着自身轴线自转,使推料杆的u形的尖端远离待包装物,从而使点数拨叉不会在u形尖端给待包装物持续加力,所以推料杆不会压碎待包装物。
18.优选的,所述控叉滑槽为不规则的封闭圆环。
19.通过采用上述技术方案,不规则圆环的形状能够确保点数单轴的自转。控叉滑槽距离控叉定盘的圆心的距离由大变小,控叉单轴的自转方向与点数单轴绕点数总轴的公转方向相反;控叉滑槽距离控叉定盘的圆心的距离由小变大,控叉单轴的自转方向与点数单轴绕点数总轴的公转方向相同。
20.优选的,所述点数盘设置在所述控叉定盘外侧远离点数转盘的一侧。
21.通过采用上述技术方案,控叉定盘距离点数转盘较近,便于控制点数单轴的转动,使控叉滑槽的到控叉定盘中心的距离变化较小,就可以实现点数单轴所需角度的自转。
22.综上所述,本技术包括以下至少一种有益技术效果。
23.1.点数装置和供料装置都在一套设备中实现了,简化了由点数装置和供料装置组合的组合。
24.2.点数滚筒对待包装物点数,点数滚筒上轴向设有点数单轴,每个点数单轴对应一个点数齿,每个点数轴上设有点数拨叉,每个点数拨叉带动一个待包装物。因此一个待包装物对应一个点数拨叉,对应一个点数单轴,对应一个点数齿,对应点数传感器就会计数一次。由于同步供料装置已经将每个输料皮带的待包装物都有间距的分开,且同频同步,从而保证每个点数拨叉都能在相同的时刻带走一个待包装物。同步供料和点数结构的设置协同作用实现对待包装物的同步供料点数包装。
25.3.在点数拨叉和转料轨交接处,点数拨叉逐渐脱离与待包装物的接触,设置控叉定盘,控制点数单轴沿其自身为轴线的旋转运动,使点数单轴在沿着点数总轴公转的同时,又沿着自身轴线自转,使推料杆的u形的尖端远离待包装物,从而使点数拨叉不会在u形尖端给待包装物持续加力,所以推料杆不会压碎待包装物。
26.4.稳定传动待包装物,供料同时点数,无需单独将待包装物再走一个流程,通过滚动式的点数滚筒,实现滚动式持续供料,使待包装物有序排列,成为特定数量的不碎裂的高档包装品。
附图说明
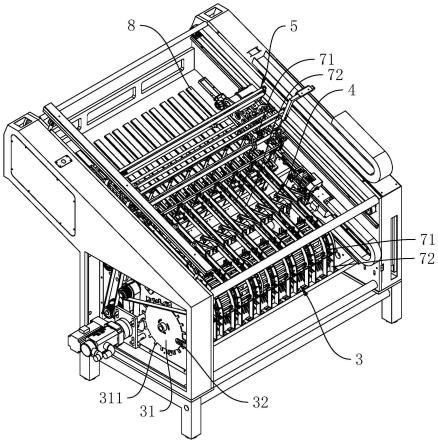
27.图1是本技术点数供料包装机整体图。
28.图2是本技术同步装置结构图。
29.图3是本技术突显点数滚筒的结构图。
30.图4是本技术点数滚筒的结构图。
31.图5是本技术图4中i部的放大图。
32.图6是本技术控叉定盘立体图。
33.图7是本技术控叉定盘左视图。
34.图8是本技术点数滚筒左视图。
35.图9是本技术小航车结构立体图。
36.图10是本技术小航车结构左视图。
37.图11是本技术大航车结构立体图。
38.图12是本技术大航车前货叉局部结构示意图。
39.图13是本技术大航车后叉局部结构示意图。
40.图14是本技术大航车运动方向、前货叉和后货叉运动方向标示图。
41.图15是本技术实施例大航车和小航车初始位置图。
42.图16是本技术实施例小航车先完成一次运送过程的位置关系图。
43.图17是本技术实施例大航车与小航车交接待包装物时结构示意图。
44.图18是本技术实施例大航车后叉承接待包装物时的结构示意图。
45.图19是本技术实施例大航车提升至行程终点位置时的结构示意图。
46.附图标记说明:1、理料装置;11、理料皮带;2、同步装置;21、同步伺服电机;22、传动轮;23、张紧轮;231、调节螺母;24、同步齿带;25、同步齿轮;26、承载板;261、调节槽;27、支撑筒;28、同步转杆;29、同步拨轮;291、弧形槽;3、点数滚筒;31、点数盘;311、点数凸齿;32、点数传感器;33、点数单轴;34、点数拨叉;341、置料台;342、推料杆;35、控叉定盘;351、控叉滑槽;36、控叉转杆;361、控叉滑块;37、点数转盘;38、点数总轴;4、小航车;41、小车架;42、升降伺服电机;43、传动齿轮;44、螺纹杆;441、螺纹块;442、拨块;45、小车滑块;46、小车行走块;47、小车拨料轴;48、小车拨料杆;481、u形拨钩;49、小车滑轨;5、大航车;51、前杆;511、前货叉;52、后杆;521、后货叉;53、齿带固定板;54、大车电机;541、凸轮机构;542、前摇杆;543、前转柄;544、前叉转轴;545、前叉第一连杆;546、前叉第二连杆;547、前叉第三连杆;55、大车齿带;56、大车气缸;561、铰接柱;562、后摇杆;563、后转柄;564、后叉转轴;565、后叉第一连杆;566、后叉第二连杆;567、后叉第三连杆;6、承料轨;61、圆轨;62、侧板;63、动力杆;7、转料轨;71、承物件;72、限位件;8、放料轨;9、待包装物。
具体实施方式
47.以下结合所有附图以及具体实施例对本技术作进一步详细说明。
48.本实施例是一台七料道的食品点数供料包装机,能够快速理料并包装特定数量的待包装物9,本实施例中的待包装物9为圆形的薄片状易碎食品。
49.参照图1,包装机包括理料装置1、同步装置2、点数滚筒3、小航车4和大航车5。理料
装置1设有理料皮带11,每条料道上的待包装物9通过多条理料皮带11的运输,使待包装物9在同步装置2前端汇集足够的数量,以便同步装置2在每次将七个料道同步时能够保证每个料道上都有待包装物9,而不会出现某个料道空载的现象。
50.待包装物9经过同步装置2在承料轨6上继续前行,承料轨6的另一端设有点数滚筒3,点数滚筒3将待包装物9由承料轨6上接到与点数滚筒3配合的转料轨7上,随着点数滚筒3的运转,水平放置的薄片状待包装物9变成竖直的。转料轨7的另一端设有放料轨8,转料轨7的两侧设有可以向放料轨8方向运动的小航车4,包装机内侧壁上设有大车齿带55、大车滑轨、小车齿带和小车滑轨49,大车滑轨在小车滑轨49的上部,大车齿带55在小车齿带的上部。大航车5两端在小车滑轨49内滑动,小航车4两端在大车滑轨内滑动,大航车5由大车齿带55传动,小航车4由小车齿带传动。点数滚筒3的最高点为第一工位,当第一工位存储了特定数量的待包装物9后,小航车4运动拉住这些待包装物9,将待包装物9提升一段距离,使待包装物9位于转料轨7上的第二工位,给后面继续被供料的待包装物9腾出空位,即清空第一工位。待第一工位上再有足够的待包装物9,大航车5拉住第二工位和第一工位的待包装物9,将它们一同移动至放料轨8上的第三工位,放料轨8将大航车5运输来的已经点数过的待包装物9放料到包装容器中,完成包装。
51.参照图2,同步装置2的同步功能是通过同步齿带24实现的,在包装机的机架上沿各待包装物9料道排列的方向固设有承载板26,承载板26的一端固设有同步伺服电机21,电机输出端固接传动轮22,承载板26的另一端设有调节槽261,调节槽261下端设有可自由转动的张紧轮23,张紧轮23整体框架通过调节螺母231固定在调节槽261的合适位置。
52.在承载板26上同步伺服电机21与调节槽261之间还设有14个相同的支撑筒27,每个支撑筒27中穿设有同步转杆28,同步转杆28的一端伸出支撑筒27的上部固接有同步拨轮29,同步转杆28的另一端延伸到承载板26下部固接有同步齿轮25。同步拨轮29的外周面设有四个弧形槽291。同步齿带24绕过传动轮22和张紧轮23形成闭合的回路,同步齿带24自传动轮22至张紧轮23依次交错绕设后,再从张紧轮23直接回到传动轮22形成闭合的回路,使相邻两个同步齿轮25的转动方向相反。同步伺服电机21每次输出动力后,都有一个弧形槽291对应待包装物9,同步拨轮29轴向转动,实现一次同步输料。从而实现相邻的两个同步拨轮29的转动方向相反,保证一条料道的两端的同步拨轮29运转的切线方向与料道中待包装物9运动方向一致,实现同步拨动待包装物9的目的。
53.参照图1,待包装物9通过同步拨轮29后,就到了承料轨6上,承料轨6中间有两条横放的圆柱条状的圆轨61,两条圆轨61中间是镂空的,以供下部的动力杆63运动而带动待包装物9运动,从而将待包装物9同步的运送到下一个工序;两条圆轨61外侧是竖直立设的侧板62,用于限定待包装物9的运行轨迹,同时也不使待包装物9掉落或脱离圆轨61。在圆轨61下部设有动力链条,动力链条上设有动力杆63,动力链转动时,位于两条圆轨61之间用来推动待包装物9的动力杆63垂直于待包装物9的运动平面。
54.参照图3和图4,经过同步装置2的待包装物9在承料轨6的末端由点数滚筒3转接,点数滚筒3在周向上设有多个点数单轴33,每个点数单轴33上对应各转料轨7的位置设有点数拨叉34,点数滚筒3同轴设置有点数盘31,点数盘31随点数滚筒3的转动而同步转动,点数盘31周向设有点数凸齿311,每个点数单轴33对应一个点数凸齿311,点数单轴33与点数凸齿311一一对应,机架上点数凸齿311的运动轨迹上固设有点数传感器32,每当一个点数凸
齿311经过点数传感器32时,也就是点数单轴33给每条转料轨7各提供了一个待包装物9,点数传感器32就会计数一次,以此达到计数供料数量的目的。
55.点数滚筒3位于大航车5和小航车4的工序前端,包装机机架上穿设有点数总轴38,点数总轴38的两端各固接一个点数转盘37,每个点数转盘37上都设有多个轴向的通孔,多个通孔沿周向阵列设置。两个点数转盘37上的通孔一一对应,点数单轴33穿过相对设置的通孔,点数单轴33可在通孔内自由转动,点数单轴33在两个点数转盘37内侧的部分与承料轨6对应位置处固设有点数拨叉34,点数拨叉34设有置料台341和推料杆342,推料杆342为u形,承料轨6上的待包装物9是通过动力杆63推到点数滚筒3的,点数滚筒3上的推料杆342的u形的中部用于让位动力杆63,从而平稳的将待包装物9转接到点数滚筒3上。待包装物9自承料轨6上流转到点数拨叉34上时,是通过推料杆342托接,待包装物9抵接在置物台上。点数总轴38的一端设有齿轮状圆盘,齿轮状圆盘与点数总轴38同步运转,齿轮状圆盘的每个齿都是点数凸齿311,点数凸齿311的位置和数量与点数单轴33一一对应,包装机机架上对应点数凸齿311运动轨迹处设置有点数传感器32,用来计数点数单轴33供料的数量。
56.由于点数滚筒3是圆周运动,在点数滚筒3的上游和下游的转料轨7是直的,点数滚筒3的转运的圆周方向上的转料轨7是圆弧状的。转料轨7包括两个承物件71和两个限位件72,待包装物9放置在两个承物件71上,两个限位件72直立在待包装物9两边,用于限定待包装物9的位置,使待包装物9不会从生产线上掉落。随着点数滚筒3的转动,片状的待包装物9逐渐竖立起来,此时的点数拨叉34与转料轨7前进方向的夹角度数越来越小,存在点数拨叉34将易碎的待包装物9压碎的可能性。为防止点数拨叉34将待包装物9压碎在转料轨7的较高位置。点数滚筒3还有以下结构。
57.参照图5和图6,机架上点数转盘37远离点数拨叉34的一侧固设有控叉定盘35,控叉定盘35穿过点数总轴38,不与点数总轴38联动。点数单轴33的端部固接有控叉转杆36,控叉转杆36的另一端向着远离点数转盘37的方向设有控叉滑块361,控叉滑块361在控叉定盘35的控叉滑槽351内滑动,控叉滑槽351为不规则的圆环状。不规则圆环的形状能够确保点数单轴33的自转。控叉滑槽351距离控叉定盘35的圆心的距离由大变小,控叉单轴的自转方向与点数单轴33绕点数总轴38的公转方向相反;控叉滑槽351距离控叉定盘35的圆心的距离由小变大,控叉单轴的自转方向与点数单轴33绕点数总轴38的公转方向相同。参照图7和图8,控叉定盘35上的控叉滑槽351是不规则的环形,在控叉滑槽351朝向转料轨7的弧内,控叉滑槽351的位置距离控叉定盘35的中心更近。图中α、β、γ角度对应的控叉滑槽351是当点数拨叉34运动到转料轨7接触再与转料轨7脱离的过程阶段。在α段,点数拨叉34的推料杆342逐渐向图中的左边偏移,保持推料杆342对待包装物9有推动作用,不至于使待包装物9失去推力而倾倒或滑落,推料杆342的倾斜面保持大致与转料轨7的位置垂直的位置;在β段,点数拨叉34的推料杆342即将与待包装物9分离,点数拨叉34的推料杆342大角度回转,以期在较小的转动行程内回到正常的规则的运转角度;在γ段,此时的点数拨叉34即将调整角度与水平位置的承料轨6上的待包装物9接触,这一段的控叉滑槽351距离控叉定盘35中心的位置越来越大。
58.图8中,点数滚筒3顺时针转动,在α段,控叉滑槽351距离控叉定盘35的圆心的距离由大变小,推料杆342逆时针转动;在γ段,控叉滑槽351距离控叉定盘35的圆心的距离由小变大,推料杆342顺时针转动。
59.点数盘31设置在控叉定盘35外侧远离点数转盘37的一侧。控叉滑槽351到控叉定盘35的最大距离与点数单轴33到点数总轴38的距离相同。控叉定盘35距离点数转盘37较近,便于控制点数单轴33的转动,使控叉滑槽351的到控叉定盘35中心的距离变化较小,就可以实现点数单轴33所需角度的自转。
60.参照图3-图8,点数滚筒3的工作过程为:点数总轴38转动带动点数转盘37转动,点数转盘37带动点数单轴33绕点数总轴38转动,点数单轴33上的点数拨叉34沿点数总轴38的轴向运动,使待包装物9自水平位置的承料轨6上转移到点数拨叉34上,点数拨叉34上的置物台承托待包装物9,推料杆342推动待包装物9前行,转料轨7两侧的限位件72限制待包装物9的位置,使待包装物9不会掉落。点数拨叉34与转料轨7的直的部分即将垂直时,点数单轴33外部固接的控叉滑块361会使点数单轴33沿自身为轴线,做逆时针旋转,图8中各推料杆342的倾斜角度也可看出如此运动倾向。待运动到β段时,下一个待包装物9即将与此待包装物9接触,此待包装物9不会因为与推料杆342分离而失去动力滑落或翻倒。此时推料杆342与此待包装物9分离,控叉滑槽351的位置使点数单轴33沿自身轴线做顺时针旋转。
61.参照图9和图10,小航车4设置在点数滚筒3的下一个工序,当转料轨7的第一工位聚集了特定数量的薄片待包装物9时,小航车4将这些待包装物9拉到转料轨7较远端的第二工位,以空出第一工位为待包装物9聚集准备空间。
62.包装机机架内侧壁设有小车滑轨49,小航车4设有小车架41,小车架41一端设有小车滑块45,另一端设有小车行走块46。小车滑块45与小车滑轨49滑移连接,小车行走块46与小车齿带固接,通过小车齿带的传动,使小航车4整体沿着转料轨7的方向移动,从而实现小航车4在第一工位和第二工位之间的移动。
63.小车行走块46上固设有升降伺服电机42,升降伺服电机42的输出轴传递动力给传动齿轮43,传动齿轮43中心固接有螺纹杆44,螺纹杆44与螺纹块441螺纹连接,螺纹块441设有u形结构,u形结构中间抵接拨块442,拨块442与小车拨料轴47连接。通过传动齿轮43的传动,使螺纹块441沿螺纹杆44上下移动,螺纹块441的u形结构拨动拨块442,使与拨块442连接的小车拨料轴47沿自身轴线在b-b1的方向往复转动。小航车4整体在包装机的机架内沿a-a1方向做直线运动。
64.小车架41上设有小车拨料轴47,小车拨料轴47上对应转料轨7各轨道位置设有小车拨料杆48,小车拨料杆48的端部为u形拨钩481,u形拨钩481限制待包装物9两端的位置,便于后续与大航车5实现待包装物9的交接。
65.参照图11-图14,小航车4是与大航车5配合工作的,大航车5主要包括两组限位结构,分别对应第一工位和第二工位。大航车5设有齿带固定板53,通过齿带固定板53与大车齿带55(见图1)固定,大车齿带55带动大航车5在包装机机架内沿转料轨7方向做直线运动。大航车5设有沿料道的排列方向的前杆51和后杆52,前杆51上对应转料轨7各料道位置设有多个前货叉511;后杆52上对应转料轨7各料道位置设有多个后货叉521。
66.参照图12,大航车5一端设有大车电机54,大车电机54输出轴传动带动实现凸轮机构541,凸轮机构541连接前摇杆542,前摇杆542与前转柄543铰接,前转柄543固定在前叉转轴544上,前叉摇杆运动带动前叉转轴544转动,前叉转轴544与前叉连杆机构连接,前叉连杆机构包括前叉第一连杆545、前叉第二连杆546和前叉第三连杆547。具体的:前叉转轴544固接前叉第一连杆545,前叉第一连杆545与前叉第二连杆546的一端铰接,前叉第二连杆
546的另一端与前叉第三连杆547铰接。前叉第三连杆547的另一端与前叉第一连杆545的另一端与齿带固定板53连接。前杆51固定在前叉第二连杆546上。通过前叉第一连杆545、前叉第二连杆546和前叉第三连杆547实现前杆51上的前货叉511沿着d-d1方向做直线的往复运动。
67.参照图13,大航车5另一端设有大车气缸56,大车气缸56远离活塞杆的一端通过铰接柱561与齿带固定板53铰接,大车气缸56活塞杆的一端连接有后摇杆562,后摇杆562与后转柄563铰接,后转柄563运动带动后叉转轴564转动,后叉转轴564与后叉连接机构连接,后叉连杆机构包括后叉第一连杆565、后叉第二连杆566和后叉第三连杆567。具体的:后叉转轴564固接后叉第一连杆565,后叉第一连杆565与后叉第二连杆566的一端铰接,后叉第二连杆566的另一端与后叉第三连杆567铰接。后叉第三连杆567的另一端与后叉第一连杆565的另一端与齿带固定板53连接。后货叉521固定在后叉第二连杆566上。通过后叉第一连杆565、后叉第二连杆566和后叉第三连杆567实现后杆52上的后货叉521沿着d-d1方向做直线的往复运动。
68.大航车5整体在大车齿带55的传动下沿c-c1方向做直线的往复运动。
69.参照图15,当点数滚筒3清点好特定的待包装物9聚集在图15的位置时,此时待包装物9位于第一工位,小航车4向b1方向运动,拉住待包装物9,并将其拉到转料轨7的远端,e位置之前是转料轨7,e位置之后是放料轨8,小航车4将待包装物9拉到转料轨7后端,e位置的前端暂存。
70.参照图15-图18,大航车5的初始位置是大航车5的前货叉511位于第一工位上方。前货叉511是直板状的长条结构,当小航车4将待包装物9拉到转料轨7后端时,此时的待包装物9位于第二工位,小航车4的初始位置即第一工位又存好了相同数量的待包装物9。大航车5先将后货叉521放下,从小航车4的u形拨钩481接过待包装物9,即大航车5在第二工位放下后货叉521,大航车5再将前货叉511放下,即大航车5在第一工位放下前货叉511,前货叉511对第一工位的相同数量的待包装物9限位,在大航车5前货叉511限位的同时,小航车4在转料轨7上向点数滚筒3的方向运动,回到初始位置即第一工位,为下一次拉取待包装物9做准备。
71.参照图19,大航车5带着第一工位和第二工位的待包装物9向着远离点数滚筒3的方向运动,直到经过e的位置处,使原本第一工位和第二工位的待包装物9都限位在放料轨8的上,大航车5最终的位置即为第三工位。放料轨8和转料轨7一样,都是两个承物件71支撑待包装物9。不同的是,转料轨7的两个承物件71之间的距离不能改变,而放料轨8的两个承物件71之间的距离可以改变,通过改变放料轨8的两个承物件71之间的距离实现放料,将待包装物9放料到包装容器或者包装袋中完成包装。
72.本实施例的实施原理在于:点数装置和供料装置都在一套设备中实现了,简化了由点数装置和供料装置组合的组合。点数滚筒3对待包装物9点数,点数滚筒3上轴向设有点数单轴33,每个点数单轴33对应一个点数齿,每个点数轴上设有点数拨叉34,每个点数拨叉34带动一个待包装物9。因此一个待包装物9对应一个点数拨叉34,对应一个点数单轴33,对应一个点数齿,对应点数传感器32就会计数一次。由于同步供料装置已经将每个输料皮带的待包装物9都有间距的分开,且同频同步,从而保证每个点数拨叉34都能在相同的时刻带走一个待包装物9。同步供料和点数结构的设置协同作用实现对待包装物9的同步供料点数
包装。
73.点数拨叉34逐渐脱离与待包装物9的接触,设置控叉定盘35,控制点数单轴33沿其自身为轴线的旋转运动,使点数单轴33在沿着点数总轴38公转的同时,又沿着自身轴线自转,使推料杆342的u形的尖端远离待包装物9,从而使点数拨叉34不会在u形尖端给待包装物9持续加力,所以推料杆342不会压碎待包装物9。
74.传动待包装物9时稳定传动,没有大幅度振动,供料同时点数,无需单独将待包装物9再走一个流程,通过滚动式的点数滚筒3,实现滚动式持续供料,使待包装物9有序排列,成为特定数量的不碎裂的高档包装品。
75.以上均为本技术的较佳实施例,并非依此限制本技术的保护范围,故:凡依本技术的结构、形状、原理所做的等效变化,均应涵盖于本技术的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1