具有竖直对齐的双托架的AS/RS升降机的制作方法
具有竖直对齐的双托架的as/rs升降机
技术领域
1.本公开内容一般地涉及容器、包裹和分立商品的物料搬运,并且更具体地涉及用于使用竖直升降机将产品移入和移出自动存储和取回系统(as/rs)的技术。
背景技术:
2.为了降低存储大库存的成本,零售商和分销商越来越依赖于可以快速接收批发数量的特定商品并创建不同商品的子集作为消费者或商店补充订单的系统。在一些情况下,可能从大量可能类型的商品中进行选择以完成特定订单。自动化允许从接收位置输送所选择的商品,将所需的商品分拣到订单容器中,并将完成的订单容器运输到装运位置。一般而言,沿其它自动化物料搬运系统的一些部分需要人际交互。
3.as/rs系统被设计用于在制造、分销、零售、批发和机构中自动存储和取回零件和物品。他们最初起源于1960年代,最初聚焦于重托盘负荷,但随着技术的发展,搬运的负荷变小。该系统在计算机化控制下进行操作,维护存储物品的库存。通过指定要取回的物品类型和数量来完成物品的取回。计算机确定在存储区域中可以取回物品的位置并调度该取回。它将适当的自动化存储和取回机器(srm)引导到存储所述物品的位置,并引导机器将物品存放在它将被拾取的位置处。输送机和或自动化引导车辆(诸如穿梭车)的系统有时是as/rs系统的一部分。这些把负荷运进和运出存储区域,并将它们移动到制造车间、装载码头、码垛机或订单履行站。为了存储物品,托盘或装物盘被放置在系统的输入站,库存信息被输入到计算机终端中,并且as/rs系统将负荷移动到存储区域,为物品确定合适的位置,并存储该负荷。随着物品被存储到货架中或从货架取回,计算机相应地更新其库存。
4.as/rs系统的益处包括减少了将物品运输到库存中和从库存运输出的劳动力,降低了库存水平,更准确地跟踪库存,以及节省空间。物品通常比在手动存储和取回物品的系统中被存储得更密集。即时生产的趋势通常需要生产输入,混合托盘输出或电子商务订单履行的子托盘级可用性,并且as/rs是组织在生产线旁边存储较小物品的快得多的方式。
5.一种as/rs技术被称为穿梭技术。在该技术中,水平移动由各自在货架的一层上进行操作的独立穿梭车进行,而处于货架内固定位置处的升降机负责竖直移动。通过针对这两个轴使用两台单独的机器,穿梭技术能够提供比堆垛起重机和多层穿梭车更高的吞吐量。存储和取回机器在特定站将负荷拾取或下放到支撑运输系统的支座,在特定站处进港和出港的负荷被精确定位以便进行适当的搬运。
6.通常竖直升降机可能是对于as/rs系统的整体吞吐量的限制项目。每个竖直升降机也是总体as/rs解决方案的成本的重要部分。增加额外的竖直升降机可能使得得到的解决方案太昂贵并且投资回报不足以实现。
技术实现要素:
7.以下呈现简化的概述以便提供对所公开的各方面的一些方面的基本理解。这个概述不是广泛的综述,并且既不意图标识关键或重要元素,也不意图描绘这些方面的范围。其
目的是以简化的形式呈现所描述特征的一些概念,作为稍后呈现的更详细描述的序言。
8.根据一个或多个方面及其对应的公开内容,结合物料搬运系统描述各个方面,物料搬运系统包括具有多于一个竖直间隔层的存储货架。每层具有可从邻近通道访问的多个存储位置。一个或多个穿梭车辆服务于存储货架的相应层。竖直升降机具有靠近存储货架定位的竖直支撑结构。竖直支撑结构具有第一和第二托架,所述第一和第二托架可沿竖直支撑结构的相应的和第一和第二竖直部分独立地定位。第一竖直驱动系统耦合到第一托架以把第一托架定位成在竖直支撑结构的第一竖直部分内的所选择的层处拾取和存放商品。第二竖直驱动系统耦合到第二托架以把第二托架定位成在竖直支撑结构的第二竖直部分内的所选择的层处拾取和存放商品。处理器子系统与第一和第二竖直驱动系统通信,以在不会彼此碰撞的情况下选择性地将第一和第二托架定位在相应选择的层处。
9.根据一个或多个方面及其对应的公开内容,结合竖直升降机来描述各个方面,所述竖直升降机包括可靠近存储货架定位的竖直支撑结构。第一和第二托架被容纳用于沿着竖直支撑结构的竖直移动。第一和第二托架中每一个可分别在竖直支撑结构的第一和第二竖直部分中独立定位在竖直支撑结构上。第一竖直驱动系统耦合到第一托架以把第一托架定位成在竖直支撑结构的第一竖直部分内的所选择的层处拾取和存放商品。所选择的层对应于存储货架的层。所述层具有可从邻近通道访问的多个存储位置,所述多个存储位置由一个或多个穿梭车辆服务。第二竖直驱动系统耦合到第二托架以把第二托架定位成在竖直支撑结构的第二竖直部分内的所选择的层处拾取和存放商品。所述层对应于存储货架的层。所述层具有可从邻近通道访问的多个存储位置,所述多个存储位置由一个或多个穿梭车辆服务。处理器子系统与第一和第二竖直驱动系统通信,以在不会彼此碰撞的情况下选择性地将第一和第二托架定位在相应选择的层处。
10.根据一个或多个方面及其对应的公开内容,结合使用具有两个竖直对齐的托架的竖直升降机将商品移入和移出as/rs的方法来描述各个方面。所述方法包括:将进料输送机上的商品输送到存储货架,所述存储货架具有多于一个竖直间隔层,每层具有可从邻近通道访问的多个存储位置。所述方法包括接收针对商品的所选择的存储位置。所述方法包括:至少部分地基于与所选择的存储位置相关联的存储货架的对应层来选择竖直升降机的一个托架以从所述进料输送机接收所述产品。竖直升降机具有靠近存储货架定位的竖直支撑结构。所述一个托架与竖直升降机的另一个托架竖直对齐。托架可沿竖直支撑结构的相应第一和第二竖直部分独立地定位。所述方法包括:激活一个竖直驱动系统以将一个托架定位在进料输送机处。该方法包括:在所述一个托架上接收商品。所述方法包括:激活所述一个竖直驱动系统,从而将所述一个托架定位在对应层处以存放商品以供正服务于所述邻近通道的穿梭车辆收起。该方法包括:激活另一个竖直驱动系统以定位所述另一个托架以避免在移动以接收和存放商品期间与所述一个托架发生任何碰撞。
11.对于实现前述和相关目的,一个或多个方面包括在下文中充分描述并在权利要求中特别指出的特征。以下描述和附图详细阐述了某些说明性方面,并且仅指示可以采用这些方面的原理的各种方式中的一些。当结合附图考虑时,根据以下详细描述,其他优点和新颖特征将变得显而易见,并且所公开的方面意图包括所有这些方面和其等同物。
附图说明
12.当结合附图理解时,根据下面阐述的详细描述,本公开内容的特征、性质和优点将变得更加显而易见,在附图中相似的附图标记始终对应地标识并且其中:图1图示根据一个或多个实施例的物料搬运系统的透视图,所述物料搬运系统包括利用双托架升降机的自动化存储和取回系统(as/rs);图2图示根据一个或多个实施例的图1的物料搬运系统的示例性双托架升降机的等距视图;图3图示根据一个或多个实施例的图2的双托架升降机的一个托架的等距细节视图;图4图示根据一个或多个实施例的图2的双托架升降机的双竖直驱动系统的等距细节视图;图5图示根据一个或多个实施例的服务于图1的as/rs的一个通道的单层穿梭(ols)车辆的透视图;图6图示根据一个或多个实施例的示例性物料搬运控制系统的功能框图;图7图示根据一个或多个实施例的具有示例性as/rs控制器的示例性物料搬运系统的功能框图,所述示例性as/rs控制器具有分布式架构;图8图示根据一个或多个实施例的as/rs的第一版本的侧视图,所述as/rs的第一版本由采用竖直行进段中的重叠的双托架升降机以及进料和出料输送机服务,所述进料和出料输送机分别由一个托架单独服务;图9图示根据一个或多个实施例的as/rs的第二版本的侧视图,所述as/rs的第二版本由采用大重叠竖直行进段的双托架升降机以及进料和出料输送机服务,所述进料和出料输送机由任一托架服务;图10图示根据一个或多个实施例的as/rs的第三版本的侧视图,所述as/rs的第三版本由采用非重叠竖直行进段的双托架升降机以及进料和出料输送机服务,所述进料和出料输送机分别由一个托架单独服务;图11图示根据一个或多个实施例的as/rs的第四版本的侧视图,所述as/rs的第四版本由采用竖直行进段中的小重叠的双托架升降机以及进料和出料输送机服务,所述进料和出料输送机由一个托架单独服务;以及图12图示根据一个或多个实施例的使用双托架升降机增加进和出as/rs的吞吐量的方法的流程图。
具体实施方式
13.现在参照附图描述各个方面。在以下描述中,为了解释的目的,阐述了许多特定细节以提供对一个或多个方面的透彻理解。然而,可能明显的是,可以在没有这些特定细节的情况下实践各个方面。在其他情况下,为了便于描述这些方面,以框图形式示出了公知的结构和设备。
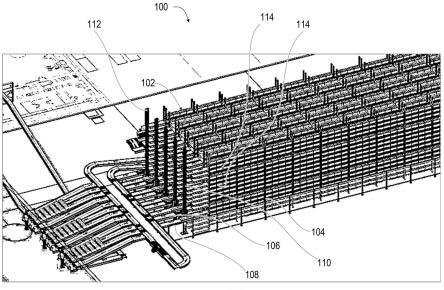
14.图1图示物料搬运系统100,物料搬运系统100包括自动化存储和取回系统(as/rs)102。as/rs 102的存储货架104经由进料输送机106被提供有商品用于存储。商品被出料输送机108从存储货架104带走用于订单履行、商店补充、装运等等。双托架竖直升降机110在
进料和出料输送机104、106之间把商品移动到存储货架104的适当的层。竖直升降机110具有竖直支撑结构112,竖直支撑结构112被定位成靠近所述存储货架104以在存储货架104内的选定层114处拾取和存放商品。
15.图2图示具有竖直对齐的第一和第二托架116、118的竖直升降机110,第一和第二托架116、118可沿着竖直支撑结构112的相应第一和第二竖直部分120、122独立定位。第一竖直驱动系统124耦合到第一托架116以把第一托架116定位在竖直支撑结构112的第一竖直部分120内。第二竖直驱动系统126被耦合到第二托架118以把第二托架118定位在竖直支撑结构112的第二竖直部分122内。在示例性实施例中,每个竖直驱动系统包括传动带128、130,传动带128、130被容纳在竖直支撑结构112的前侧132,彼此横向偏移并且竖直对齐。传动带128、130分别在被动的同轴顶部滑轮134、136上被容纳并且在独立驱动的同轴底部滑轮140、142上被容纳以用于竖直旋转。图2-3图示第一和第二驱动系统124、126的第一和第二驱动马达144、146通过90
°
减速传动装置148、150分别独立地旋转底部滑轮140、142。
16.图4图示两个马达驱动辊(mdr)152、154中的第一托架116,两个马达驱动辊延伸通过辊架156到达安装支架158。每个mdr152、154是o形段,该o形段耦合到非动力辊160的子集以形成活动辊式输送机162用于把商品移动到竖直升降机110上和移动离开竖直升降机110(图2)。电力可以通过电力总线、电缆等被提供给托架。
17.图5图示as/rs 102可以包括自主穿梭车辆164,自主穿梭车辆164沿着存储货架104内的一个或多个通道168服务于存储位置166。双托架竖直升降机110(图2)将一个/多个商品170留在存储货架104的所分配的层114和通道168上的拾取和存放(p/d)站172处。穿梭车辆164在p/d站172拾取一个/多个商品170,把它们移动到所分配的存储位置166,并且放置商品166以存储。当需要时,穿梭车辆164从分配的存储位置166取回一个/多个商品170,并把它们移动到p/d站172以供双托架竖直升降机110(图2)拾取。
18.在图6中,描绘了分布中心处理架构602的示例性物料搬运系统600,其中双托架升降机控制器604被实现在as/rs控制器606内。存储在计算机可读共享存储器610内的控制器逻辑608由物料搬运系统600的控制器614中的处理器612执行。控制器逻辑608的一个功能可以是机器控制逻辑。控制器614可以是由备份控制器615所支持的主控制器,使得维护人员能够在故障情况下交换电缆或连接而没有不适当的服务停机时间。替代地,在故障情况下,监督系统或自诊断功能可以引起主设备和备份设备之间的自动切换。
19.扫描逻辑(或者仅仅扫描616)指代控制器逻辑608内的实现方式,其中,处理器612重复执行读输入部件618、求解逻辑部件620和写输出部件622。通过定期、周期(确定性)地执行这个序列,那么机器控制逻辑可以对扫描进行计数以测量时间。这三个步骤可以由可编程逻辑控制器(plc)、个人计算机(pc)、小型控制器或微控制器等执行。求解逻辑部件620可合并简单到复杂的、硬连线到配置的if-then-else分支逻辑、运动控件。求解逻辑部件620所使用的数据可以驻留在计算机可读共享存储器610或数据存储设备624(例如,本地、远程、基于云的,等等)内。用户接口626可以用来修改求解逻辑部件620,例如通过改变使配置或操作改变的值。
20.如常规理解的,控制器逻辑608可接收二进制类型输入(例如开关、光电监测器(photo eye)等)并生成二进制类型的输出(例如,马达触点、电磁阀、灯激励等)。例如,在这样的实现方式中,用户接口626可能至少部分需要按钮控件和灯。控制器逻辑608的最新发
展可以包括rs232串行设备,rs232串行设备具有实现对话屏幕和数据显示的传统阴极射线管(crt)屏幕和键盘以及用于生成报告的打印机。也可以支持更现代的显示器类型,诸如hdmi有线或无线耦合的平面屏幕显示器。条形码扫描可以检测由物料搬运系统600处理的物品。最近,物料搬运系统600和分布中心处理架构602内的有线和无线通信实现了更加分布式和远程隔离的实现方式。例如,这样的通信架构可以采用诸如profibus和ethercat之类的总线耦合器。
21.扫描616可以是许多控制扫描之一,用于支持物料搬运系统600的各部分的增加的速度和复杂性。特定逻辑需要在比其他逻辑更短的间隔期间被执行并且因此扫描616可以具有不同的周期性,为方便起见通常被选择作为最短持续时间扫描616的倍数而发生。示例包括用于运动控制的1ms和2ms的扫描616,用于合并子系统的32ms的扫描616,以及用于一般输送机的211ms的扫描616。
22.物料搬运系统600可使用串行端口、以太网、文件传输协议(ftp)、传输控制协议/因特网协议(tcp/ip)等把主机通信628合并到主机系统630。因此,主机系统630可以为物料搬运系统600做出决定。例如,扫描仪632可以看到条形码。条形码被发送到主机系统630,诸如经由桥634。主机系统630以目的地进行响应。作为响应,物料搬运系统600使具有条形码的物品去往该目的地。替代地,该过程可能需要接收一批目的地或目的地的下载以供物料搬运系统600参考,该目的地被映射到条形码作为查找表(lut)的一部分。
23.计算机可读共享存储器610能够允许操作系统(例如,windows,linux等)636的执行与实时扩展638一起执行。实时扩展638确保机器控制逻辑(控制器逻辑608)完全按照所需的时间表开始执行。执行时间表的变化以微秒为单位度量。这种方法确保了机器控制所需的那种精度,同时保留了对通用操作系统(例如windows)的功能和灵活性的使用机会。也可以被包括用于机器控制的plc可以在它自己的专有环境(硬件和软件)中进行操作,并使用通信进行集成。来自这些通信的数据640被存储在计算机可读共享存储器610中用于在控制决定中使用和用于在用户接口626上显示。在示例性版本中,数据640不被实时扩展638控制。以类似的方式,在控制过程中使用的其他通信设备642(例如秤、打印机)经由专用内部通信总线(例如以太网)644连接到处理器612。控制器614还可以具有使用特定通信协议进行对接的内部输入/输出驱动器645。
24.分布中心处理架构602可包括物料搬运系统600外部的经由桥634通信的其他系统,诸如数据库646、仓库控制系统(wcs)648和仓库管理系统(wms)650。附加或替代地,竖直集成的仓库执行系统(wes)651可以将自动化层控制与订单取得和履行操作合并。此外,用户接口626能够经由描绘为本地应用652和web应用654的用户接口626促进远程或自动化交互。控制器614可以包括用于支持这种交互的特定接口,诸如用于与用户接口626交互的用户接口数据访问部件656、用于与其他外部系统对接的中间件路由部件658。操作系统服务660和设备通信部件662还可以支持通信,诸如传感器664、致动器667、诊断系统668和分拣机速度控件670。
25.控制器逻辑608可以功能上描述为具有软件功能(诸如分拣控件673)的物料搬运控制层672,物料搬运控制层672寻址分布中心内的某些子系统:订单履行674、圆盘传送带管理676、倾斜装物盘/交叉带(tt/cb)控件678、输送机控件680、订单管理器682和路由管理器684。
26.图7图示具有示例性as/rs控制器702的物料搬运系统700,示例性as/rs控制器702具有分布式架构用于控制:(i)一个或多个多层穿梭(mls)车辆704,(ii)一个或多个单层穿梭(ols)车辆706,(iii)进料和出料输送机708,以及(iv)双托架竖直升降机714的独立竖直驱动系统a和b 710、712。在一个或多个实施例中,物料搬运系统100包括客户端企业资源计划(erp)/主机系统716, erp/主机系统716管理订单和库存以及驻留在作为erp/主机层控件720的一部分的客户端骨干网络718上的其他功能。仓库管理系统(wms)/物料流动系统(mfs)控制层722管理erp/主机层控件720和由as/rs控制器702提供的自动化控制层724之间的仓库特有功能。wms/mfs控制层722可以包括在物流系统本地接入网络(lan)726上操作的计算环境,诸如虚拟专用网络(vpn)连接728、客户端工作站730和wms/mfs服务器系统732,wms/mfs服务器系统732也在客户端骨干网718上。
27.as/rs控制器702可以包括控制mls车辆704的多层穿梭控件734。在一个实施例中,可编程逻辑控制器(plc)734可通过现场总线输送机前段网络736管理p/d输送机和前段。mls站柜738可以包括通道访问控件740,通道访问控件740为进入存储货架104(图1)的维护人员提供安全访问。馈送轨道电源742可给电力条744提供能量,电力条744为mls车辆704供电。数据接口(i/f)746可以与mls车辆704进行无线通信以将商品引导到分配的存储位置和从分配的存储位置引导商品。
28.as/rs控制器702可以包括ols控件748用于控制ols车辆706。例如,静态通道控件750可以包括plc控件752,plc控件752与现场总线输送机前段754以及用于人员对存储货架104(图1)的安全访问的通道访问控件756对接。馈送轨道电源758可以为电力条760提供能量以为ols车辆706供电。
29.as/rs控制器702可以包括as/rs升降机控件762,as/rs升降机控件762包括执行进料、出料和竖直升降机控件766的处理器子系统764(诸如plc控制器)。处理器子系统764分配双托架768、770在不碰撞的情况下移动。
30.对于一个示例,图8图示由双托架升降机802服务的as/rs的第一版本800,双托架升降机802采用托架810、812的分别竖直行进段806、808中的重叠804。上进料和出料输送机814由托架810单独服务。下进料和出料输送机818由托架812单独服务。图9图示由双托架升降机902服务的as/rs的第二版本900,双托架升降机902采用托架910、912的分别竖直行进段906、908的大重叠904。与大重叠904对齐的进料和出料输送机914由任一托架910、912服务。图10图示由双托架升降机1002服务的as/rs的第三版本1000,双托架升降机1002采用竖直行进段1006、1008之间的非重叠段1104。上进料和出料输送机1014由托架1010单独服务。下进料和出料输送机1018由托架1012单独服务。图11图示由双托架升降机1102服务的as/rs的第四版本1100,双托架升降机1102采用在托架1110、1112的分别竖直行进段1106、1108中的小重叠1104。上进料和出料输送机1114由托架1110单独服务。下进料和出料输送机1118由托架1112单独服务。
31.在使用中,方法1200图示了使用单个竖直升降机增加传送进和出as/rs存储货架的商品吞吐量的方法。在一个或多个实施例中,方法1200包括将进料输送机上的商品输送到存储货架,所述存储货架具有多于一个竖直间隔层,每层具有可从邻近通道访问的多个存储位置(框1202)。方法1200包括接收针对商品的所选择的存储位置(框1204)。方法1200包括:至少部分地基于与所选择的存储位置相关联的存储货架的对应层来选择竖直升降机
的一个托架以从所述进料输送机接收所述产品。竖直升降机具有靠近存储货架定位的竖直支撑结构。所述一个托架与竖直升降机的另一个托架竖直对齐。每个托架可沿竖直支撑结构的相应第一和第二竖直部分独立地定位(框1206)。方法1200包括:激活一个竖直驱动系统以将一个托架定位在进料输送机处(框1208)。方法1200包括:在所述一个托架上接收商品(框1210)。方法1200包括:激活所述一个竖直驱动系统,从而将所述一个托架定位在对应层处以存放商品以供正服务于所述邻近通道的穿梭车辆收起(框1212)。方法1200包括:激活另一个竖直驱动系统以定位另一个托架以避免在移动以接收和存放商品期间与所述一个托架发生任何碰撞(框1214)。方法1200包括:接收命令以从所选择的存储位置移除所述商品(框1216)。方法1200包括:选择所述一个托架以在对应层处接收所述商品并且把所述商品存放在出料输送机处(框1218)。方法1200包括:激活对应的竖直驱动系统以传送所述一个托架上的商品并且同时把所述另一个托架定位成离开所述一个托架的路径(框1220)。
32.虽然已经参考示例性实施例描述了本公开内容,但是本领域技术人员将理解,在不脱离本公开内容的范围的情况下,可以进行各种改变并且可以用等同物替换其元件。另外,在不脱离本公开内容的实质范围的情况下,可以做出许多修改以使特定系统、设备或其部件适于教导本公开内容。因此,意图是,本公开内容不限于所公开的用于实施本公开内容的特定实施例,相反,本公开内容将包括落入所附权利要求的范围内的所有实施例。此外,术语“第一”、“第二”等的使用不表示任何次序或重要性,相反,术语“第一”、“第二”等用于区分一个元件与另一个元件。
33.根据本公开内容的各个方面,可以利用包括一个或多个物理设备的“处理系统”来实现元件、元件的任何部分或元件的任何组合,所述物理设备包括处理器。处理器的非限制性示例包括微处理器、微控制器、数字信号处理器(dsp)、现场可编程门阵列(fpga)、可编程逻辑器件(pld)、可编程逻辑控制器(plc)、状态机、门控逻辑、分立硬件电路以及被配置为执行贯穿本公开内容所描述的各种功能的其它合适硬件。处理系统中的一个或多个处理器可以执行指令。执行指令以实现结果的处理系统是被配置为执行引起所述结果的任务的处理系统,诸如通过向处理系统的一个或多个部件提供将引起这些部件执行动作的指令,所述动作自己或与由处理系统的其它部件执行的其它动作组合将引起所述结果。软件应被广义地解释为表示指令、指令集、代码,代码段、程序代码、程序、子程序、软件模块、应用、软件应用、软件包、例程、子例程、对象、可执行文件、执行的线程、过程、函数等,无论其被称为软件、固件、中间件、微代码、硬件描述语言还是其它。该软件可驻留在计算机可读介质上。计算机可读介质可以是非暂态计算机可读介质。计算机可读介质包括例如磁存储设备(例如硬盘、软盘、磁条)、光盘(例如、压缩盘(cd)、数字多功能盘(dvd))、智能卡、闪存设备(例如卡、棒、密钥驱动器)、随机存取存储器(ram)、只读存储器(rom)、可编程rom(prom)、可擦除prom(eprom)、电可擦除prom(eeprom)、寄存器、可移动盘以及用于存储可由计算机访问和读取的软件和/或指令的任何其他合适的介质。计算机可读介质可以驻留在处理系统中,在处理系统外部,或跨包括处理系统的多个实体分布。计算机可读介质可以体现在计算机程序产品中。例如,计算机程序产品可包括封装材料中的计算机可读介质。本领域技术人员将认识到如何依赖于特定应用和施加在整个系统上的整体设计约束最佳地实现贯穿本公开内容呈现的所述功能。
[0034]“处理器”表示可以被配置为单独或与其他设备相结合地执行在本公开内容中所
阐述的各种功能的设备。“处理器”的示例包括微处理器、微控制器、数字信号处理器(dsp)、现场可编程门阵列(fpga)、可编程逻辑器件(pld)、可编程逻辑控制器(plc)、状态机、门控逻辑以及分立硬件电路。短语“处理系统”用来指代一个或多个处理器,该一个或多个处理器可以被包括在单个设备中或分布在多个物理设备中。
[0035]“指令”表示可被用来指定可以由处理器执行的物理或逻辑操作的数据。指令应被广义解释为包括代码、代码段、程序代码、程序、子程序、软件模块、应用、软件应用、软件包、例程、子例程、对象、可执行文件、执行的线程、过程、函数、硬件描述语言、中间件等等,无论在软件、固件、硬件、微代码中还是以其他方式编码。
[0036]
各种实施例可在各种计算设备的任何中实现。计算设备通常将包括耦合到易失性存储器和大容量非易失性存储器(诸如闪存的盘驱动器)的处理器。计算设备还可以包括耦合到处理器的软盘驱动器、固态驱动器和压缩盘(cd)驱动器。计算设备还可以包括:耦合到处理器的多个连接器端口(诸如usb或firewire
™
连接器插座),用于建立数据连接或容纳外部存储器设备;或其它网络连接电路,用于建立从处理器到网络或总线(诸如耦合到其他计算机和服务器的局域网、因特网、公共交换电话网络和/或蜂窝数据网络)的网络接口连接。计算设备还可以包括全部耦合到处理器的跟踪球或触摸板、键盘和显示器。
[0037]
各种实施例也可被实现在各种可商购获得的服务器设备中的任何上。这样的服务器通常包括耦合到易失性存储器和大容量非易失性存储器(诸如盘驱动器)的处理器。该服务器还可以包括耦合到处理器的软盘驱动器、压缩盘(cd)或dvd盘驱动器。该服务器还可以包括耦合到所述处理器用于与网络(诸如耦合到其它计算机和服务器的局域网、因特网、公共交换电话网络和/或蜂窝数据网络)建立网络接口连接的网络接入端口。
[0038]
提供所公开的各方面的先前描述以使任何本领域技术人员能够制作或使用本公开内容。对这些方面的各种修改对本领域技术人员将是容易地显而易见的,并且本文定义的一般原理可在不脱离本公开内容的精神或范围的情况下应用于其它实施例。因此,本公开内容不意图被限制于本文所示的实施例,而是要符合与本文公开的原理和新颖特征一致的最广范围。
[0039]
鉴于以上描述的示例性系统,可以根据所公开的主题来实现的方法已经参照几个流程图被描述。虽然为了解释简单的目的将方法示出和描述为一系列框,但是应该理解和明白,所要求保护的主题并不被框的次序限制,因为一些框可以以不同的次序发生和/或与来自本文所描绘和描述的内容的其它框并行发生。此外,并非所有图示的框都可能被需要来实现本文所描述的方法。此外,还应该理解的是,本文所公开的方法能够被存储在制品上,以促进这种方法运输和传送到计算机。术语“制品”,如本文所使用的,意图涵盖可从任何计算机可读设备、载体或介质访问的计算机程序。
[0040]
应当理解的是,被认为通过引用并入本文的任何专利、出版物或其他公开材料全部或部分地仅在如下程度上被并入本文:所并入的材料不与现有定义、陈述或本公开内容中阐述的其它公开材料冲突。因此,并且在必要的程度上,本文明确阐述的公开内容取代通过引用并入本文的任何冲突材料。被认为通过引用并入本文但与现有定义、陈述或本文阐述的其它公开材料冲突的任何材料或其部分将仅在如下程度上被并入:在该并入材料和现有公开材料之间不产生冲突。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1