上纸装置、玻璃基板包装系统和上纸方法与流程
本公开涉及玻璃基板包装,尤其涉及一种上纸装置、玻璃基板包装系统和上纸方法。
背景技术:
1、光电显示玻璃基板经过清洗和检验后进入包装区,然后利用取片机器人和取纸机器人实现良品包装至a型架上。在取纸过程中,每小包间隔纸数量在200-300张,重量大约在50kg左右,需要通过人工将小包间隔纸放置到纸盒里。
2、然而由于所使用的间隔纸尺寸较大,因此需要通过多人合作才能将间隔纸通过滑轨推至取纸机器人内部。随着生产效率的提升,每小包间隔纸只能使用1h左右,这就要求各班组当班期间多次进行换纸操作,且每次更换纸盒、上纸以及调纸的时候都需要产线停机,对生产效率造成一定的影响,同时多人共同操作,存在一定的安全隐患,另外对人员也是一种资源浪费。
技术实现思路
1、本公开所要解决的一个技术问题是:现有玻璃基板包装过程中存在的需要多人将间隔纸推至取纸机器人而导致的需要多次换纸且产线停机的技术问题。
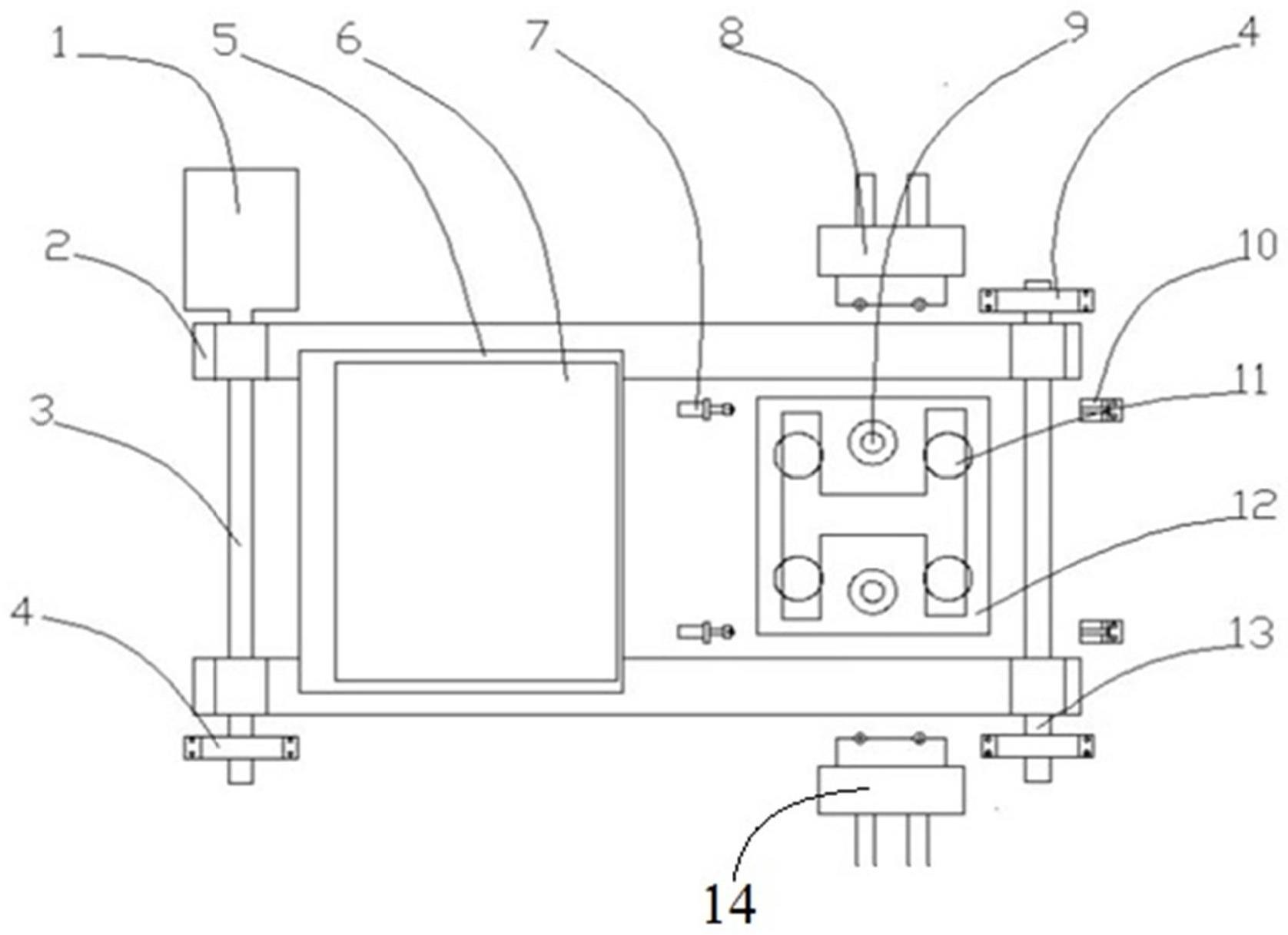
2、为解决上述技术问题,本公开实施例提供一种上纸装置,其包括:纸盒、驱动装置和纸盒位置限定装置;其中,驱动装置包括:电机、传输皮带、转动轴承一、轴承座和转动轴承二;纸盒位置限定装置包括:后定位夹紧装置、左定位夹紧装置、升降气缸、前限位挡块、浮动气缸、托盘和右定位夹紧装置;
3、电机的输出轴与转动轴承一的一端卡接,转动轴承一的另一端与轴承座转动连接,电机用于驱动转动轴承一转动;转动轴承一和转动轴承二设于上纸装置的两端,用于带动传输皮带进行转动;传输皮带套设于转动轴承一和转动轴承二上,其与转动轴承一和转动轴承二转动连接,传输皮带用于传输纸盒;轴承座用于固定转动轴承一和转动轴承二;
4、后定位夹紧装置设于上纸装置的中后部,用于夹紧停止运动的纸盒的后部;左定位夹紧装置和右定位夹紧装置对称地设置在上纸装置后部的传输皮带的外部两侧,左定位夹紧装置和右定位夹紧装置用于对停止向前运动的纸盒进行定位;升降气缸位于托盘的下方,用于带动托盘和浮动气缸升起和降落;前限位挡块位于上纸装置的最前端,用于限制纸盒向前运动的最大距离,同时当纸盒停止运动时,前限位挡块起到夹紧纸盒前端的作用;浮动气缸位于托盘的上部,当纸盒停止运动时用于从左右两侧夹紧纸盒;托盘位于升降气缸和浮动气缸之间,用于盛放纸盒;
5、纸盒,其放置于传输皮带上,用于盛放间隔纸。
6、在一些实施例中,纸盒、托盘和前限位挡块采用不锈钢材质制备。
7、在一些实施例中,前限位挡块沿与传输皮带平行方向在转动轴承二的前方左右对称设置。
8、在一些实施例中,后定位夹紧装置沿与传输皮带平行方向且临近传输皮带的位置左右对称设置。
9、在一些实施例中,升降气缸在托盘下部左右对称设置。
10、在一些实施例中,后定位夹紧装置、左定位夹紧装置和右定位夹紧装置为气缸夹紧装置,气缸夹紧装置选用的气源为洁净过滤气源。
11、在一些实施例中,浮动气缸上部还设有洁净防护层。
12、本公开第二方面还提供一种玻璃基板包装系统,该系统包括上纸装置。
13、本公开第三方面还提供一种上纸方法,其对上纸装置进行操作,上纸方法的步骤包括:
14、s1:先将间隔纸放入纸盒内,然后将带有间隔纸的纸盒放置在传输皮带上;
15、s2:启动电机,转动轴承带动传输皮带运动;
16、s3:当纸盒最前端运动至前限位挡块位置时,传输皮带停止运行;
17、s4:升降气缸升起,通过托盘和浮动气缸将纸盒和间隔纸托起;
18、s5:将纸盒托起到指定位置后,通过左定位夹紧装置和右定位夹紧装置对纸盒及间隔纸进行定位和夹紧;
19、s6:再通过后定位夹紧装置将纸盒缓慢向前推动,至纸盒最前端接触前限位挡块,实现定位并夹紧,完成玻璃基板包装的纸盒上纸的工作。
20、在一些实施例中,间隔纸放入纸盒内时,需要以纸盒的右侧为基准位将间隔纸放置在纸盒内。
21、在一些实施例中,使用叉车将纸盒铲运至两侧的传输皮带上。
22、在一些实施例中,步骤s6完成后,采用取纸机器人取走纸盒内的间隔纸。
23、上纸装置的工作过程包括:
24、(1)将一定数量的间隔纸放置在纸盒的固定位置上,其中,间隔纸在放置至纸盒内的时候,要确保所放的位置以右侧为基准位,以确保包装的最大偏差符合品质管控要求;
25、(2)然后,将纸盒放置在传输皮带上,确保纸盒大约在两条传输皮带中间位置,以确保传输稳定性;
26、(3)然后启动电机,转动轴承随着电机的转动进行运动,通过轴承座进行固定,带动传输皮带进行转动,同时带动轴承和传输皮带循环运动;
27、(4)当纸盒最前端运动至前限位挡块时,电机停止运转,传输皮带停止运动,此时升降气缸缓慢升起,带动托盘以及浮动气缸升起,并将纸盒缓慢托起,将纸盒和间隔纸带离传输皮带,并升至一定高度后停止;
28、(5)待纸盒停止运动后,左右定位夹紧装置开始对纸盒进行定位,并通过浮动气缸将其夹紧,确保纸盒左右两侧不再发生移动或偏移,此时后定位夹紧装置缓慢将纸盒向前推动,至纸盒最前端与前限位挡块接触为止,此时纸盒的四边定位夹紧,最终通过取纸机器人将纸盒内的间隔纸取出。
29、通过上述技术方案,本公开提供的上纸装置具有如下技术效果:
30、(1)本公开上纸装置通过设置纸盒位置限定装置具体是升降气缸、浮动气缸、限位挡块以及定位夹紧装置,实现了纸盒在上下、前后、左右三个自由度范围内运动和调整,从而确保取纸机器人对取纸精度的要求,使得取纸左右两侧偏差不超过5mm,上下两侧偏差不超过5mm。
31、(2)本公开上纸装置,有效的解决了多人上纸而导致的劳动强度大问题,并降低了上纸频次,提高了上纸精度,保证了玻璃基板的包装质量。
技术特征:
1.一种上纸装置,其特征在于,所述上纸装置包括:纸盒(5)、驱动装置和纸盒位置限定装置;其中,
2.根据权利要求1所述的上纸装置,其特征在于,所述纸盒(5)、托盘(12)和前限位挡块(10)采用不锈钢材质制备。
3.根据权利要求1所述的上纸装置,其特征在于,所述前限位挡块(10)沿与传输皮带(2)平行方向在转动轴承二(13)的前方左右对称设置。
4.根据权利要求1所述的上纸装置,其特征在于,所述后定位夹紧装置(7)沿与传输皮带(2)平行方向且临近传输皮带(2)的位置左右对称设置。
5.根据权利要求1所述的上纸装置,其特征在于,所述升降气缸(9)在托盘(12)下部左右对称设置。
6.根据权利要求1所述的上纸装置,其特征在于,所述后定位夹紧装置(7)、左定位夹紧装置(8)和右定位夹紧装置(14)为气缸夹紧装置,所述气缸夹紧装置选用的气源为洁净过滤气源。
7.根据权利要求1所述的上纸装置,其特征在于,所述浮动气缸(11)上部还设有洁净防护层。
8.一种玻璃基板包装系统,其特征在于,所述玻璃基板包装系统包括权利要求1至7中任意一项所述的上纸装置。
9.一种上纸方法,其特征在于,所述上纸方法对上述权利要求1至7中任意一项所述的上纸装置进行操作,所述上纸方法的步骤包括:
10.根据权利要求9所述的上纸方法,其特征在于,所述间隔纸(6)放入纸盒(5)内时,需要以纸盒(5)的右侧为基准位将间隔纸(6)放置在纸盒(5)内;
技术总结
本公开提供一种上纸装置、玻璃基板包装系统和上纸方法,涉及玻璃基板包装技术领域。该上纸装置包括:纸盒(5)、驱动装置和纸盒位置限定装置;驱动装置包括电机(1)、传输皮带(2)、转动轴承一(3)、轴承座(4)和转动轴承二(13);纸盒位置限定装置包括后定位夹紧装置(7)、左定位夹紧装置(8)、升降气缸(9)、前限位挡块(10)、浮动气缸(11)、托盘(12)和右定位夹紧装置(14)。本上纸装置通过设置升降气缸、浮动气缸、限位挡块及定位夹紧装置实现了纸盒在三个自由度范围内运动和调整,从而确保取纸机器人对取纸精度的要求,避免多人取纸,降低了上纸频次,提高了上纸精度,保证了玻璃基板的包装质量。
技术研发人员:李青,李赫然,吴亚平,林海峰,方红义,陈涛涛,董光明,赵玉乐,李震
受保护的技术使用者:芜湖东旭光电科技有限公司
技术研发日:
技术公布日:2024/1/13
- 还没有人留言评论。精彩留言会获得点赞!