一种采用多齿轮模组的机器人的制作方法
1.本发明涉及运输线领域,特别涉及一种采用多齿轮模组的机器人。
背景技术:
2.随着锂电池的快速发展,锂电池的加工生产也关系着生产的稳定和效率。其中锂电池在初步加工完成后,还需要喷涂漆面或包覆绝缘层、化成(即充放电)、检测和包装的过程,但是现有的运输线一般采用单线结构的运输线以及配合机械手实现锂电池的搬运和移动,但是这种结构的设备存在占用面积较大,且现有的运输机器人一般为单层结构,当单一运输机器人的工序较大时,则需要采用多个生产线,相互平行叠加,因此占用的面积较大,且锂电池在多个工序相互搬运过程中,容易产生漏检或其他非正常的问题。
3.与此同时,现有的运输机器人由单一零件拼凑而成,对于现有的工业化设计,这种结构存在组装时间长、组装难度大,容易出现组装错误。
4.例如中国发明专利201910821693.3,将锂电池放置在环形传送带上,启动环形传送带转动,将锂电池运输,并通过取料口自动将锂电池转移到取料台上方,无需人工运输,自动化程度更高,提高了工作效率,实质这种自动化机器人,采用单一的运输线进行运输,调试较为麻烦,且组装时间会比较长。
技术实现要素:
5.本发明的主要目的是提出一种采用多齿轮模组的机器人,旨在采用多齿轮模组实现模块化组装运输机器人,在保证运输稳定的同时可以保证快速组装,且因为模块化设置因此可以实现应用于锂电池的不同加工场景,例如检测、喷涂或包装等。
6.为实现上述目的,本发明提出一种采用多齿轮模组的机器人,包括:
7.运输线,所述运输线呈“口”型设置,所述运输线包括机架、四组直线运输模组、四组衔接运输模组以及一组垂向移动模组,所述运输线设有至少两层,两两层运输线之间设有垂向移动模组;
8.机构区域,所述机构区域设于运输线的中部,所述机构区域用于放置检测装置、化成装置或包装装置;
9.衔接运输模组,所述衔接运输模组包括弧形状的外挡座和内挡座、弧形传动皮带以及第一驱动装置,所述第一驱动装置包括设于外挡座和内挡座两端的第一枢转轴和第二枢转轴以及与第一枢转轴相连接的第一旋转电机,所述弧形传动皮带呈闭环状设置且设于第一枢转轴和第二枢转轴之间,所述弧形传动皮带的上壁面低于外挡座的上壁面和内挡座的上壁面,所述外挡座和内挡座之间设有导向座,所述导向座的上壁设有弧形状的导向槽,所述导向座的下壁设有导向轮,所述弧形传动皮带穿过导向槽和导向轮且与导向座的上壁和下壁相贴合;
10.直线运输模组,所述直线运输模组包括第一挡座和第二挡座,所述第一挡座和第二挡座分别与外挡座和内挡座相衔接,所述第一枢转轴和第二枢转轴向两侧延伸有第一齿
轮部和第二齿轮部;位于直线运输模组两端的两个衔接运输模组分别设有相邻的第一枢转轴和第二枢转轴(可以理解为衔接运输模组设有两个,分别为第一衔接运输模组和第二衔接运输模组,第一衔接运输模组和第二衔接运输模组分别设于直线运输模组的两端),相邻的第一齿轮部和第二齿轮部设有闭环设置的直线传动皮带,所述直线传送皮带设于第一齿轮部和第二齿轮部上;
11.垂向移动模组,所述垂向移动模组包括垂向移动架以及设于垂向移动架的平移模组,当产品移动至平移模组时,所述垂向移动架可带动平移模组从上层运输线移动至下层运输线或从下层运输线移动至上层运输线。
12.具体地,所述导向槽的两侧设有圆槽,所述圆槽设有枢转安装的转轮,所述转轮与弧形传动皮带的侧壁相抵;所述弧形传动皮带的横截面呈圆柱状。
13.具体地,所述第一枢转轴的中部和第二枢转轴的中部分别设有第一驱动轮和第二驱动轮,所述弧形传动皮带的两端设于第一驱动轮和第二驱动轮上;所述第一驱动轮和第二驱动轮为齿轮结构,其中的弧形传动皮带则为齿轮带。
14.具体地,所述第一挡座的内侧和第二挡座的内侧分别延伸有第一支撑板和第二支撑板,所述直线传送皮带设有两个分别为间隔设置第一直线传送皮带和第二直线传送皮带,所述第一直线传送皮带的内壁与第一支撑板的外壁相贴合,所述第二直线传送皮带的内壁与第二支撑板的外壁相贴合。
15.具体地,所述衔接运输模组和垂向移动模组为一组,每组的首端和尾端相互相连接。
16.具体地,所述第一齿轮部和第二齿轮部结构相同,包括主齿轮以及对称设置于主齿轮两侧的第一偏向轮和第二偏向轮,所述第一偏向轮和第二偏向轮错位设置,且第二偏向轮伸出第一支撑板或第二支撑板的上壁,所述直线传动皮带穿设于单侧或双侧的第二偏向轮、第二偏向轮和主齿轮之间。
17.具体地,所述垂向移动架包括设于机架的导向套、滑动安装于导向套的导向柱以及设于导向柱的平移模组,所述平移模组和机架之间设有伸缩电机。
18.具体地,所述平移模组包括底座、设于底座两侧框架以及设于框架中部的驱动模组,所述驱动模组包括设于框架中部的第三枢转轴、设于第三枢转轴两端驱动齿轮以及设于驱动齿轮的平移传送皮带,所述驱动齿轮设于侧框架的位置。
19.具体地,所述主齿轮两侧的第一偏向轮和第二偏向轮设于同一壳体内。
20.具体地,所述外挡座和内挡座相对的壁面分别设有牛眼轴承。
21.本发明技术方案有益效果:
22.1、通过衔接运输模组的设置实现了对治具(将锂电池放置于治具)或锂电池在闭环运输线时的转弯,实现了闭环传输,避免了现有的运输线的空间浪费,且运输更平顺,同时通过外挡座和内挡座的配合可以实现对产品的左右限位和导向,与此同时通过弧形传动皮带的设置可以实现两直线运输模组之间的衔接,结构更为简单,比起现有的闭环的运输线需要多段调整,调试时间长,这个结构的调试更为简单容易;其中导向槽为单条连贯结构因此可以起到更好的稳定运输作用(导向单一,不会出现偏移),导向轮的设置可以起到对弧形传动皮带导向的同时也可以实现余量的设置,避免弧形传动皮带遇到卡壳或负荷时出现绷紧断裂的问题;
23.2、其中直线运输模组可以根据实际产品的宽度或加工线长度适应性设置,其中直线运输模组在组装过程中,将直线传动皮带安装于第一枢转轴和第二枢转轴即可,不需要另外设置单一的传动机构,将衔接运输模组模块化,相应的直线运输模组也形成了配合模块,在组装、生产以及修复时更简单方便;
24.3、在实际的使用中,第一旋转电机为伺服旋转电机,且四个伺服旋转电机可以通过相互四个转弯传动皮带、四个直线传动皮带实现相互串联,通过伺服电机的随动系统或者设置专门的控制装置,可以保证各个直线运输模组、衔接运输模组实现传输速度一致,且也形成了相互牵引力,即使一个伺服电机出现故障,通过相互牵引也可以实现运输,但是为了避免负荷,会降低第一旋转电机的转速;
25.4、通过垂向移动模组的设置可以实现不同垂直高度的运输线实现产品的相互交替运输,即使运输线设有多层,通过机架相互叠加即可,垂向移动模组可以将产品垂向运输,实现产品的切换,例如第一层为加工工序运输线,第二层为检测工序运输线,且通过平移模组的设置可以实现产品移动至相应的运输线继续移动;
26.5、在具体实施例中,通过将运输带实现自动化的调节,实现了运输机器人的自动化工作以及加工,减少了工作人员,且布局更紧凑、稳定。
附图说明
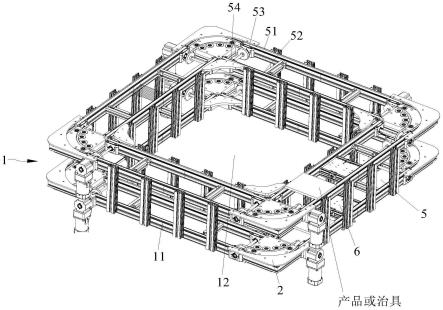
27.图1为本发明立体示意图;
28.图2为衔接运输模组立体示意图一;
29.图3为衔接运输模组立体示意图二;
30.图4为衔接运输模组俯视图;
31.图5为衔接运输模组剖视图;
32.图6为直线运输模组立体示意图;
33.图7为直线运输模组剖视图;
34.图8为直线运输模组隐藏部分结构后示意图。
35.图中,1为运输线,11为机架,12为机构区域,2为衔接运输模组,21为外挡座,22为内挡座,23为弧形传动皮带,3为第一驱动装置,31为第一枢转轴,32为第二枢转轴,33为第一旋转电机,4为导向座,41为导向槽,42为导向轮,5为直线运输模组,51为第一挡座,52为第二挡座,53为第一齿轮部,54为第二齿轮部,55为直线传动皮带,6为垂向移动模组,61为垂向移动架,62为平移模组,71为圆槽,72为转轮,81为第一驱动轮,82为第二驱动轮,91为第一支撑板,92为第二支撑板,100为主齿轮,101为第一偏向轮,102为第二偏向轮,201为导向套,202为导向柱,203为伸缩电机,300为第三枢转轴,301为驱动齿轮,302为平移传送皮带。
具体实施方式
36.下面将结合附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明的一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有作出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
37.需要说明,若本发明实施例中有涉及方向性指示(诸如上、下、左、右、前、后、顶、底、内、外、垂向、横向、纵向,逆时针、顺时针、周向、径向、轴向
……
),则该方向性指示仅用于解释在某一特定姿态(如附图所示)下各部件之间的相对位置关系、运动情况等,如果该特定姿态发生改变时,则该方向性指示也相应地随之改变。
38.另外,若本发明实施例中有涉及“第一”或者“第二”等的描述,则该“第一”或者“第二”等的描述仅用于描述目的,而不能理解为指示或暗示其相对重要性或者隐含指明所指示的技术特征的数量。由此,限定有“第一”、“第二”的特征可以明示或者隐含地包括至少一个该特征。另外,各个实施例之间的技术方案可以相互结合,但是必须是以本领域普通技术人员能够实现为基础,当技术方案的结合出现相互矛盾或无法实现时应当认为这种技术方案的结合不存在,也不在本发明要求的保护范围之内。
39.如图1至图8所示,一种采用多齿轮模组的机器人,包括:
40.运输线1,所述运输线1呈“口”型设置,所述运输线1包括机架11、四组直线运输模组5、四组衔接运输模组2以及一组垂向移动模组6,所述运输线1设有至少两层,两两层运输线1之间设有垂向移动模组6;
41.机构区域12,所述机构区域12设于运输线1的中部,所述机构区域12用于放置检测装置、化成装置或包装装置(当运输线1需要设置化成装置时,在机架11的外壁设置包覆的罩体,即可实现不同加工工序的加工要求);
42.衔接运输模组2,所述衔接运输模组2包括弧形状的外挡座21和内挡座22、弧形传动皮带23以及第一驱动装置3,所述第一驱动装置3包括设于外挡座21和内挡座22两端的第一枢转轴31和第二枢转轴32以及与第一枢转轴31相连接的第一旋转电机33,所述弧形传动皮带23呈闭环状设置且设于第一枢转轴31和第二枢转轴32之间,所述弧形传动皮带23的上壁面低于外挡座21的上壁面和内挡座22的上壁面,所述外挡座21和内挡座22之间设有导向座4,所述导向座4的上壁设有弧形状的导向槽41,所述导向座4的下壁设有导向轮42,所述弧形传动皮带23穿过导向槽41和导向轮42且与导向座4的上壁和下壁相贴合;
43.直线运输模组5,所述直线运输模组5包括第一挡座51和第二挡座52,所述第一挡座51和第二挡座52分别与外挡座21和内挡座22相衔接,所述第一枢转轴31和第二枢转轴32向两侧延伸有第一齿轮部53和第二齿轮部54;位于直线运输模组5两端的两个衔接运输模组2分别设有相邻的第一枢转轴31和第二枢转轴32,相邻的第一齿轮部53和第二齿轮部54设有闭环设置的直线传动皮带55,所述直线传送皮带设于第一齿轮部53和第二齿轮部54上;
44.垂向移动模组6,所述垂向移动模组6包括垂向移动架61以及设于垂向移动架61的平移模组62,当产品移动至平移模组62时,所述垂向移动架61可带动平移模组62从上层运输线1移动至下层运输线1或从下层运输线1移动至上层运输线1。
45.1、通过衔接运输模组2的设置实现了对治具(将锂电池放置于治具)或锂电池在闭环运输线1时的转弯,实现了闭环传输,避免了现有的运输线1的空间浪费,且运输更平顺,同时通过外挡座21和内挡座22的配合可以实现对产品的左右限位和导向,与此同时通过弧形传动皮带23的设置可以实现两直线运输模组5之间的衔接,结构更为简单,比起现有的闭环的运输线1需要多段调整,调试时间长,这个结构的调试更为简单容易;其中导向槽41为单条连贯结构因此可以起到更好的稳定运输作用(导向单一,不会出现偏移),导向轮42的
设置可以起到对弧形传动皮带23导向的同时也可以实现余量的设置,避免弧形传动皮带23遇到卡壳或负荷时出现绷紧断裂的问题;
46.2、其中直线运输模组5可以根据实际产品的宽度或加工线长度适应性设置,其中直线运输模组5在组装过程中,将直线传动皮带55安装于第一枢转轴31和第二枢转轴32即可,不需要另外设置单一的传动机构,将衔接运输模组2模块化,相应的直线运输模组5也形成了配合模块,在组装、生产以及修复时更简单方便;
47.3、在实际的使用中,第一旋转电机33为伺服旋转电机,且四个伺服旋转电机可以通过相互四个转弯传动皮带、四个直线传动皮带55实现相互串联,通过伺服电机的随动系统或者设置专门的控制装置,可以保证各个直线运输模组5、衔接运输模组2实现传输速度一致,且也形成了相互牵引力,即使一个伺服电机出现故障,通过相互牵引也可以实现运输,但是为了避免负荷,会降低第一旋转电机33的转速;
48.4、通过垂向移动模组6的设置可以实现不同垂直高度的运输线1实现产品的相互交替运输,即使运输线1设有多层,通过机架11相互叠加即可,垂向移动模组6可以将产品垂向运输,实现产品的切换,例如第一层为加工工序运输线1,第二层为检测工序运输线1,且通过平移模组62的设置可以实现产品移动至相应的运输线1继续移动;
49.5、在具体实施例中,通过将运输带实现自动化的调节,实现了运输机器人的自动化工作以及加工,减少了工作人员,且布局更紧凑、稳定。
50.在具体的衔接过程中,直线运输模组5和衔接运输模组2之间设有安装架,其中的安装架为快拆结构。
51.在本发明实施例中,所述导向槽41的两侧设有圆槽71,所述圆槽71设有枢转安装的转轮72,所述转轮72与弧形传动皮带23的侧壁相抵;所述弧形传动皮带23的横截面呈圆柱状。其中圆柱状的弧形传动皮带23具有更好的支撑性以及接触面积,即在产品的重力作用下,在直线运输模组5的推动以及产品推动下,可以实现产品的平稳运动,其中在本发明实施例中,弧形传动皮带23只设置有一条,也可以设置为两条或三条。
52.具体地,所述第一枢转轴31的中部和第二枢转轴32的中部分别设有第一驱动轮81和第二驱动轮82,所述弧形传动皮带23的两端设于第一驱动轮81和第二驱动轮82上;所述第一驱动轮81和第二驱动轮82为齿轮结构,其中的弧形传动皮带23则为齿轮带,第一驱动轮81和第二驱动轮82可以为如图所示结构,也可以为齿轮结构,其中的弧形传动皮带23则为齿轮带。
53.进一步地,所述第一挡座51的内侧和第二挡座52的内侧分别延伸有第一支撑板91和第二支撑板92,所述直线传送皮带设有两个分别为间隔设置第一直线传送皮带和第二直线传送皮带,所述第一直线传送皮带的内壁与第一支撑板91的外壁相贴合,所述第二直线传送皮带的内壁与第二支撑板92的外壁相贴合。
54.在第一实施例中,第一直线传送皮带和第二直线传送皮带用于运输治具,因此可以间隔设置;
55.在第二实施例中,第一直线传送皮带和第二直线传送皮带也可以为一体设置,其宽度与第一挡座51和第二挡座52之间的间距相适;另外的通过第一支撑板91和第二支撑板92的设置可以对直线传送皮带起到支撑作用,减少传送直线皮带的负荷,同时安装更简单,且也可以形成模块化的设计。
56.更具体地,所述衔接运输模组2和垂向移动模组6为一组,每组的首端和尾端相互相连接形成串联结构,实现转速以及移动速度的一致。
57.进一步地,所述第一齿轮部53和第二齿轮部54结构相同,包括主齿轮100以及对称设置于主齿轮100两侧的第一偏向轮101和第二偏向轮102,所述第一偏向轮101和第二偏向轮102错位设置,且第二偏向轮102伸出第一支撑板91或第二支撑板92的上壁,所述直线传动皮带55穿设于单侧或双侧的第二偏向轮102、第二偏向轮102和主齿轮100之间。其中的主齿轮100、第一偏向轮101和第二偏向轮102的配合实现了对直线传动皮带55的导向以及驱动,且根据实际的运输要求可以实现单向移动或双向移动,实现了驱动模组,其中驱动模组也适用于平移模组62的驱动机构,实现了驱动模组的模块化安装,只是安装的位置不同。
58.在本发明实施例中,所述垂向移动架61包括设于机架11的导向套201、滑动安装于导向套201的导向柱202以及设于导向柱202的平移模组62,所述平移模组62和机架11之间设有伸缩电机203,通过伸缩电机203实现了平移模组62的垂向移动。
59.具体地,所述平移模组62包括底座、设于底座两侧框架以及设于框架中部的驱动模组,所述驱动模组包括设于框架中部的第三枢转轴300、设于第三枢转轴300两端驱动齿轮301以及设于驱动齿轮301的平移传送皮带302,所述驱动齿轮301设于侧框架的位置,其中的驱动模组结构与直线运输模组5的结构基本相同。
60.更具体地,所述主齿轮100两侧的第一偏向轮101和第二偏向轮102设于同一壳体内,实现了驱动模组的模块化。
61.在本发明实施例中,所述外挡座21和内挡座22相对的壁面分别设有牛眼轴承(未图示),其中牛眼轴承为现有技术,起到对产品润滑导向的作用。
62.以上所述仅为本发明的优选实施例,并非因此限制本发明的专利范围,凡是在本发明的发明构思下,利用本发明说明书及附图内容所做的等效结构变换,或直接/间接运用在其他相关的技术领域均包括在本发明的专利保护范围内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1