一种无人驾驶施工升降梯及其控制驱动的方法与流程
本发明涉及一种升降梯的驱动方法,尤其涉及一种无人驾驶施工升降梯及其控制驱动的方法。
背景技术:
1、施工升降梯用于建筑工地施工过程,运载人货往返于不同楼层。整个设备区别于室内电梯,结构简单、操作方便、装拆简便、维护便捷,是现建筑行业垂直运输的主流设备。目前采用的控制系统为有人值守的控制方案,即有职业资格证的司机值守吊笼内,根据施工需求,将施工人员及建材通过操纵升降梯运送至各楼层。1、有人值守的升降梯运行方式存在几点弊端:2、司机必须值守,且司机必须具备驾驶资质,人员管理成本较高;3、设备运行效率较低,无自动平层功能,需司机手动操作吊笼平层;4、层门没有安全监控,无法识别在吊笼运行过程中层门是否全部关闭;5、笼内没有安全监控,需要司机提高注意力,增加驾乘风险;6、司机人员管控难,吊笼运行效率较低,增加施工进度时间。
2、针对上述存在的技术问题,本发明提供了一种无人驾驶施工升降梯及其控制驱动的方法,以解决现在施工升降梯的运行效率、安全风险的问题。该系统无需司机值守,吊笼自行检查运行状态,多重安全监控管理,降低了运营管理费用,提高了施工升降梯的运行效率和整个系统的安全性。
技术实现思路
1、本技术实施例通过提供一种无人驾驶施工升降梯及其控制驱动的方法,解决了现有技术中需要司机值守,吊笼无法自行检查运行状态,人员管理成本较高,增加驾乘风险,增加施工进度时间的问题。
2、本技术实施例采用的技术方案如下。
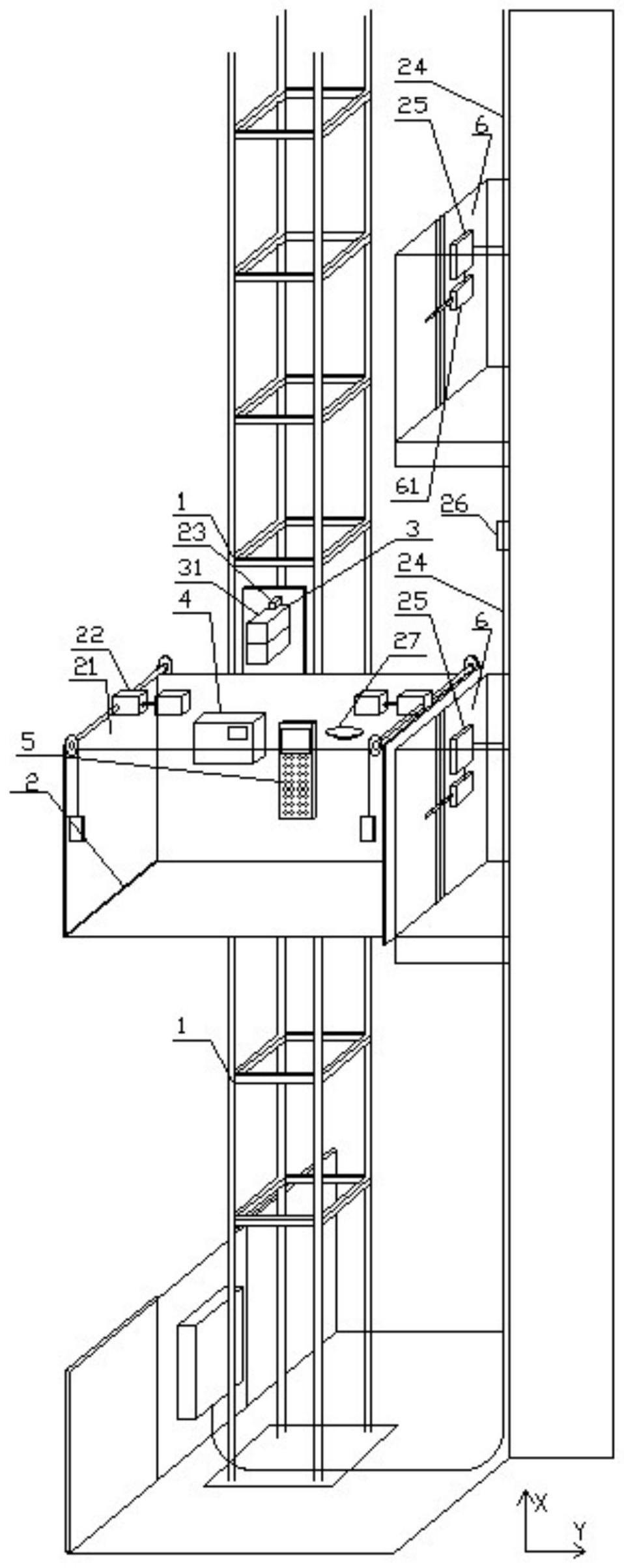
3、一种无人驾驶施工升降梯,包括标准节、沿着所述标准节上下滑动的吊笼、控制所述吊笼上下移动位置的移动装置、监控电梯运行状态的变频一体机和传输数据的操作箱;所述标准节上下阵列若干;所述移动装置设置在所述吊笼上;所述操作箱的第一信号输出端连接所述变频一体机的第一信号接收端;所述变频一体机与所述操作箱均设置在所述吊笼内。
4、进一步的技术方案为:所述吊笼两侧均设置有第一安全门与控制所述第一安全门开关的门机控制装置;所述吊笼上设置有自动平层装置;所述移动装置上设置有平层编码器;所述平层编码器沿着所述吊笼的移动方向阵列若干;所述自动平层装置的检测端朝向所述平层编码器;所述自动平层装置的信号输出端连接所述变频一体机的第二信号接收端;当所述吊笼底面与楼层底面位于同一平面且稳定所述吊笼时,所述门机控制装置将靠近楼层一端的所述第一安全门打开。
5、进一步的技术方案为:每个楼层均设置有第二安全门,所述第二安全门包括第三安全门、设置在所述第三安全门上的卡块和卡住所述卡块的卡扣;所述第三安全门相对设置;所述第三安全门旋转连接在楼层上;一侧的所述第三安全门上滑动连接所述卡块;另一侧的所述第三安全门上设置有所述卡扣。
6、进一步的技术方案为:每个楼层上均设置有将所述吊笼召唤至呼叫层的呼叫器和检测所述第二安全门是否已经关闭的层门检测装置;所述层门检测装置设置在所述第二安全门上;所述呼叫器通过电缆线相互连接;所述电缆线上设置有中继装置;所述中继装置的信号输出端连接所述变频一体机的第三信号接收端。
7、进一步的技术方案为:所述吊笼内还设置有摄像头;所述摄像头的信号输出端与所述变频一体机的第四信号接收端连接。
8、进一步的技术方案为:所述移动装置包括第一驱动装置、设置在所述第一驱动装置驱动端上的齿轮和设置在所述标准节上的齿条;所述第一驱动装置设置在所述吊笼上;所述齿轮与所述齿条啮合;当所述第一驱动装置驱动所述齿轮旋转时,所述齿轮在所述齿条上滚动;所述平层编码器沿着所述齿条均匀设置;所述自动平层装置设置在所述第一驱动装置上;所述自动平层装置的信号接收端连接所述第一驱动装置的信号输出端。
9、进一步的技术方案为:所述门机控制装置包括链轮、绕设于所述链轮的链条、驱动所述链轮旋转的第二驱动装置、将所述链条的另一端向下拉的配重块和改变所述第二驱动装置的运动方向的传动箱;所述第二驱动装置的驱动端设置在所述传动箱的接收端;所述传动箱的输出端与所述旋转杆连接;所述旋转杆同轴连接所述链轮;所述链条一端固定连接有所述配重块,所述链条另一端固定连接在所述第一安全门上;所述第二驱动装置的信号输出端所述变频一体机的第五信号接收端连接。
10、进一步的技术方案为:所述移动装置上设置有重量限制器;所述重量限制器的信号输入端连接所述第一驱动装置的信号输出端;所述重量限制器的信号输出端连接所述变频一体机的第六信号输入端。
11、一种无人驾驶施工升降梯及其控制驱动的方法,步骤一:在一楼,当施工人员进入吊笼,按相应的楼层数后,此时摄像头自动识别,重量限制器自动判断是否超载,判断所有第二安全门是否已经关闭;步骤二:在系统自行检查所有安全措施已到位后,第一安全门自动关闭,所述吊笼上行;步骤三:到达指定楼层后,等所述吊笼停稳之后,所述第一安全门自动打开,此时所述第一安全门延时自动关闭;步骤四:当没有人进入所述吊笼,所述吊笼在所述第一安全门关闭后,并且所述第二安全门已关闭状态下,层门检测装置反馈信号给变频一体机。则经过5秒后自动运行至呼梯层;步骤五:当所述吊笼运行时,楼层呼叫器呼所述吊笼时,所述吊笼自动运行至呼梯层,在确保安全的状态下自动打开所述第一安全门,此时施工人员打开所述第二安全门后进入所述吊笼内。所述吊笼自动关闭所述第一安全门,施工人员按操作箱楼层按钮,经过5秒后自动运行至呼梯层。
12、本技术实施例中提供的一个或多个技术方案,至少具有如下技术效果或优点:
13、1、由于采用了吊笼沿着标准节的方向上下滑动,操作箱将信号传输至变频一体机,变频一体机控制移动装置的运动,移动装置控制吊笼的运动,进而实现了无需司机值守,且自动控制吊笼的移动方向和移动距离。
14、2、由于采用了门机控制装置控制第一安全门的开关,吊笼上设置有平层装置,移动装置上设置有自动平层装置,平层编码器沿着标准节的方向阵列设置若干,自动平层装置的检测端朝向平层编码器,当移动装置带动吊笼上行时,自动平层装置经过平层编码器,从而判断吊笼的位置,直至自动平层装置移动至编程后的平层编码器,判定吊笼的地面与楼层的地面位于同一平面时,打开第一安全门,进而实现了吊笼自动平层且自动开关门。
15、3、由于采用了第三安全门上设置有卡块与卡扣,将第三安全门完全关闭,且卡块与卡扣均位于楼层外侧,进而实现了只能从吊笼内将第三安全门打开,保证了人员不会从楼内打开,防止发生意外。
16、4、由于采用了呼叫器将吊笼召唤至呼叫层,检测第二安全门是否关闭的层门检测装置,呼叫器之间通过电缆线互相连接,电缆线上设置有中继装置,中继装置将信号放大传递至变频一体机,进而实现了自动检测第二安全门是否完全关闭且使得呼叫器的信号更好。
17、5、由于采用了摄像头位于吊笼内,摄像头检测未戴头盔的人,进而实现了检测未带头盔的数据传输至变频一体机,变频一体机决定是否升降吊笼。
18、6、由于采用了标准节上设置有齿条,第一驱动装置设置在吊笼上,第一驱动装置的驱动端设置有齿轮,齿轮位于齿条上滚动,进而实现了第一驱动装置带动吊笼上行或下降。
19、7、由于采用了第二驱动装置的驱动端设置在传动箱的接收端,传动箱的输出端连接旋转杆,旋转杆连接链轮,链轮上绕设有链条,链条一端连接配重块,链条另一端连接第一安全门,进而实现了驱动第二驱动装置使得第一安全门开合。
20、8、由于采用了移动装置上设置有重量限制器,进而实现了将是否超载的信号传输至变频一体机,判断是否启动吊笼。
- 还没有人留言评论。精彩留言会获得点赞!