一种码垛机器的控制系统及控制方法与流程
本发明涉及机器码垛,特别是涉及一种码垛机器的控制系统及控制方法。
背景技术:
1、随着工业领域向自动化、智能化的方向发展,自动包装生产线的出现替代了繁重的重复作业,作为自动包装线最后一步工序的码垛,由于劳动强度大,目前各大企业普遍采用高效的机器人码垛,机器人码垛大大节省了劳动力,节省空间,运用灵活,稳定性高。
2、机器人自带的码垛程序功能单一,每一次更换码垛区域或码垛物品,都需要重新编程机器人以适应不同的空间位置,对机器人的重新编程会消耗大量的人力、时间成本,减缓生产速度,为此我们提出一种码垛机器的控制系统及控制方法。
技术实现思路
1、为了克服现有技术的不足,本发明提供一种码垛机器的控制系统及控制方法,高速相机和激光雷达实现对码垛点位置的精确定位,计算服务器实现了图像的实时处理。
2、为解决上述技术问题,本发明提供如下技术方案:一种码垛机器的控制系统,包括输送带、码垛机器人、高速相机、激光雷达、计算服务器、核心服务器和管理终端;
3、所述输送带用于输送待码垛的物料,所述码垛机器人安装于输送带周边用于执行物料的码垛;
4、所述高速相机和激光雷达均安装于码垛机器人的上方,用于获取码垛机器人附近码垛区域的三维空间信息;
5、所述高速相机与激光雷达互为替补且互为验证;
6、所述计算服务器分别与高速相机和激光雷达信号连接,所述计算服务器依据高速相机和激光雷达的数据计算得出码垛区域三维位置数据;
7、所述计算服务器基于码垛区域三维位置数据建立空间坐标系,再计算得出待码垛物品的码垛点位置;
8、所述输送带、码垛机器人和计算服务器均与核心服务器之间信号连接,所述核心服务器控制输送带和码垛机器人的运行;
9、所述核心服务器基于计算服务器计算出的码垛点位置控制码垛机器人执行码垛;
10、所述管理终端与核心服务器信号连接,所述管理终端用于人工控制核心服务器。
11、优选的,还包括导轨架和轨道车,所述导轨架架设于码垛区域的上方,所述轨道车安装于导轨架上并与核心服务器信号连接,所述核心服务器控制轨道车沿导轨架的行走,所述高速相机和激光雷达均安装于轨道车上,所述轨道车用于实现高速相机和激光雷达的位置调节,达到多角度的码垛区域的空间信息采集。
12、优选的,还包括照明灯,所述照明灯安装于高速相机附近并与高速相机同步开关,所述照明灯用于确保高速相机的光照环境,保证高速相机的信息采集精准度。
13、优选的,还包括信号收发器,所述信号收发器安装于轨道车上并于高速相机和激光雷达之间信号连接,所述信号收发器用于实现高速相机和激光雷达的无线通信,摆脱线缆束缚更加适用于轨道车对于高速相机和激光雷达的位置调节。
14、优选的,所述高速相机至少设计有两组,两组之间互为替补且互为验证,保证高速相机的可靠性,同时提升高速相机空间信息采集准确度。
15、优选的,所述激光雷达至少设计有两组,两组之间互为替补且互为验证,保证激光雷达的可靠性,同时提升激光雷达空间信息采集准确度。
16、优选的,所述核心服务器包括故障报警模块,所述故障报警模块在系统运行中出现设备故障时接收设备故障信号,并将设备故障信息及时示警。
17、优选的,所述管理终端包括显示屏,所述显示屏用于可视化展出系统在码垛过程中的所有步骤,便于工作人员的学习与操作。
18、一种码垛机器的控制方法,包括如下步骤:
19、高速相机和激光雷达位于码垛区域的上方采集获取码垛区域的三维空间信息;
20、计算服务器接收高速相机和激光雷达的信息数据并依此计算得出码垛区域空间位置数据;
21、计算服务器基于码垛区域空间位置数据建立空间坐标系,再计算得出待码垛物品的码垛点位置;
22、核心服务器控制输送带和码垛机器人的运行,输送带将待码垛物品输送至码垛机器人附近,码垛机器人将待码垛物品在码垛区域进行码垛;
23、核心服务器依据输送带计算得出的码垛点位置控制码垛机器人执行,将待码垛物品搬运至指定码垛点完成码垛;
24、管理终端由人工操作,提供对系统所有流程的管控。
25、优选的,所述核心服务器依据输送带计算得出的码垛点位置控制码垛机器人执行,将待码垛物品搬运至指定码垛点,重复执行上述步骤,直至码垛区域放置满或完成所有物品的码垛。
26、与现有技术相比,本发明能达到的有益效果是:
27、高速相机和激光雷达的双重三维空间信息采集能够精准地获取码垛区域的相对位置,实现对码垛点位置的精确定位,将所有需要消耗大量资源的运算部署在计算服务器,实现了图像的实时处理。
技术特征:
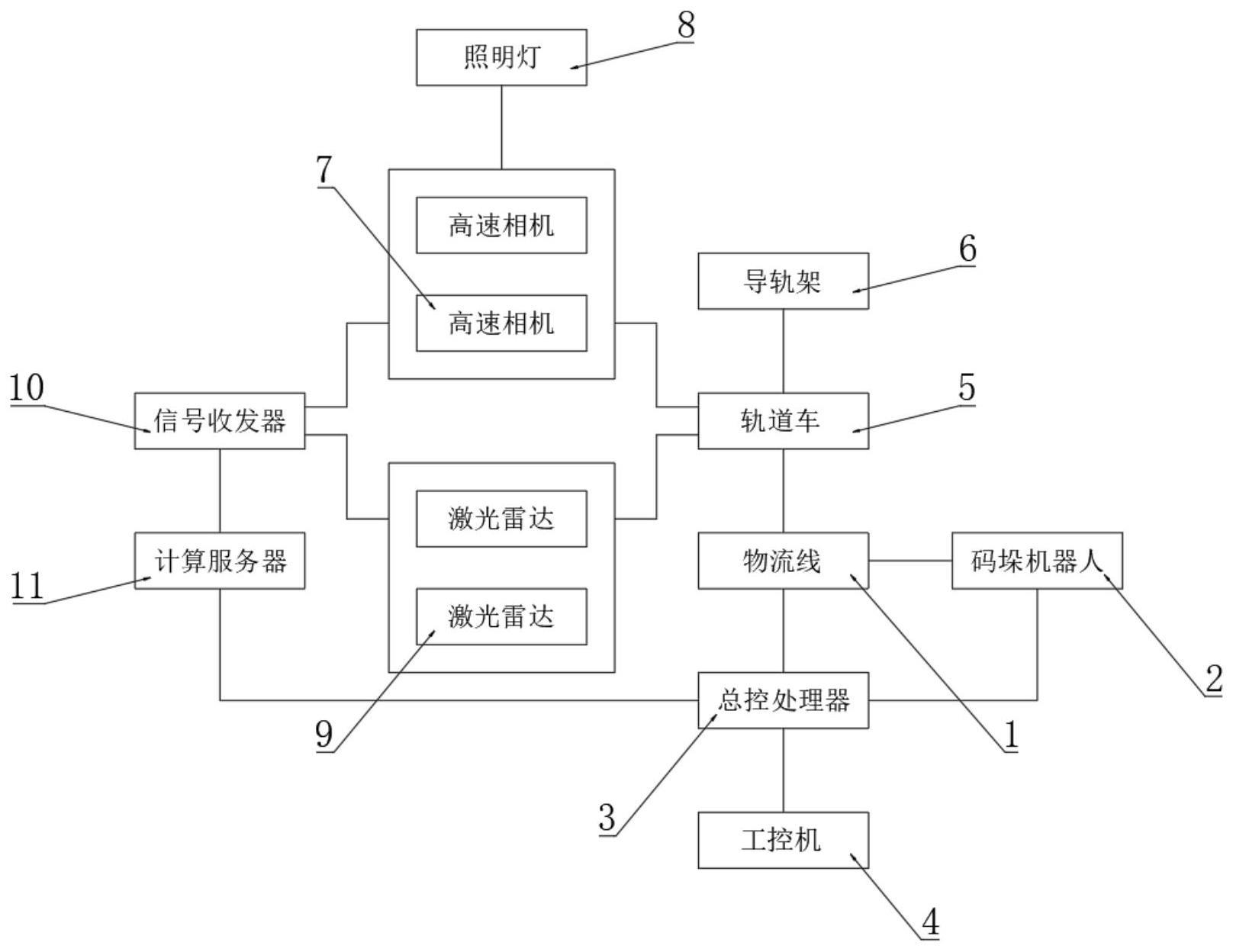
1.一种码垛机器的控制系统,其特征在于,包括输送带(1)、码垛机器人(2)、高速相机(7)、激光雷达(9)、计算服务器(11)、核心服务器(3)和管理终端(4);
2.根据权利要求1所述的一种码垛机器的控制系统,其特征在于:还包括导轨架(6)和轨道车(5),所述导轨架(6)架设于码垛区域的上方,所述轨道车(5)安装于导轨架(6)上并与核心服务器(3)信号连接,所述核心服务器(3)控制轨道车(5)沿导轨架(6)的行走,所述高速相机(7)和激光雷达(9)均安装于轨道车(5)上,所述轨道车(5)用于实现高速相机(7)和激光雷达(9)的位置调节,达到多角度的码垛区域的空间信息采集。
3.根据权利要求1所述的一种码垛机器的控制系统,其特征在于:还包括照明灯(8),所述照明灯(8)安装于高速相机(7)附近并与高速相机(7)同步开关,所述照明灯(8)用于确保高速相机(7)的光照环境,保证高速相机(7)的信息采集精准度。
4.根据权利要求2所述的一种码垛机器的控制系统,其特征在于:还包括信号收发器(10),所述信号收发器(10)安装于轨道车(5)上并于高速相机(7)和激光雷达(9)之间信号连接,所述信号收发器(10)用于实现高速相机(7)和激光雷达(9)的无线通信,摆脱线缆束缚更加适用于轨道车(5)对于高速相机(7)和激光雷达(9)的位置调节。
5.根据权利要求1所述的一种码垛机器的控制系统,其特征在于:所述高速相机(7)至少设计有两组,两组之间互为替补且互为验证,保证高速相机(7)的可靠性,同时提升高速相机(7)空间信息采集准确度。
6.根据权利要求1所述的一种码垛机器的控制系统,其特征在于:所述激光雷达(9)至少设计有两组,两组之间互为替补且互为验证,保证激光雷达(9)的可靠性,同时提升激光雷达(9)空间信息采集准确度。
7.根据权利要求1所述的一种码垛机器的控制系统,其特征在于:所述核心服务器(3)包括故障报警模块,所述故障报警模块在系统运行中出现设备故障时接收设备故障信号,并将设备故障信息及时示警。
8.根据权利要求1所述的一种码垛机器的控制系统,其特征在于:所述管理终端(4)包括显示屏,所述显示屏用于可视化展出系统在码垛过程中的所有步骤,便于工作人员的学习与操作。
9.一种码垛机器的控制方法,其特征在于,所述控制方法应用权利要求1-8任一项所述的控制系统,包括如下步骤:
10.根据权利要求9所述的一种码垛机器的控制方法,其特征在于:所述核心服务器(3)依据输送带(1)计算得出的码垛点位置控制码垛机器人(2)执行,将待码垛物品搬运至指定码垛点,重复执行上述步骤,直至码垛区域放置满或完成所有物品的码垛。
技术总结
本发明公开了一种码垛机器的控制系统及控制方法,包括输送带、码垛机器人、高速相机、激光雷达、计算服务器、核心服务器和管理终端;高速相机和激光雷达位于码垛区域的上方采集获取码垛区域的三维空间信息;计算服务器接收高速相机和激光雷达的信息数据并依此计算得出码垛区域空间位置数据;计算服务器基于码垛区域空间位置数据建立空间坐标系,再计算得出待码垛物品的码垛点位置;核心服务器控制输送带和码垛机器人的运行,输送带将待码垛物品输送至码垛机器人附近;核心服务器依据输送带计算得出的码垛点位置控制码垛机器人执行,将待码垛物品搬运至指定码垛点完成码垛;管理终端由人工操作,提供对系统所有流程的管控。
技术研发人员:周建峰,周建强,方龙锋,朱小丽
受保护的技术使用者:常州市立达塑胶电器制造有限公司
技术研发日:
技术公布日:2024/1/12
- 还没有人留言评论。精彩留言会获得点赞!