一种胶带取放机构的制作方法
1.本实用新型涉及半自动化设备技术领域,特别涉及一种胶带取放机构。
背景技术:
2.在半自动化领域,采用大量设备代替纯人工操作,在工作效率得到保障的同时,工作的精度也十分重要,对于长条型的胶带而言,其吸取、贴附过程需采用转移组件进行转移,一般采用真空吸盘,但是刚性的结构在吸附胶带时易导致吸附性差,尤其长条型结构的两头部分,进而影响胶带后续的贴附问题,因此,本实用新型研制了一种胶带取放机构,以解决现有技术中存在的问题,经检索,未发现与本实用新型相同或相似的技术方案。
技术实现要素:
3.本实用新型目的是:提供一种胶带取放机构,以解决现有技术中刚性结构导致胶带在转移贴附过程中贴附效果较差的问题。
4.本实用新型的技术方案是:一种胶带取放机构,包括待取料组件、待放料组件、以及转移组件;所述待取料组件包括翻转平台,安装于翻转平台上的第一真空缓冲吸盘,驱动翻转平台直线运动的第一驱动件,以及驱动翻转平台翻转运动的第二驱动件;所述待放料组件包括载料治具,以及驱动载料治具直线运动的第三驱动件;所述转移组件包括机械手,安装于机械手端部的挂件及第二真空缓冲吸盘;所述第一真空缓冲吸盘与第二真空缓冲吸盘均呈长条型结构,且所述第二真空缓冲吸盘受机械手驱动,往返于第一真空缓冲吸盘与载料治具之间。
5.优选的,所述第一真空缓冲吸盘与第二真空缓冲吸盘均选用橡胶吸盘,且所述第一真空缓冲吸盘上具有与胶带形状相配合的定位销。
6.优选的,所述第一真空缓冲吸盘与翻转平台之间设置有导柱及缓冲弹簧,所述第二真空缓冲吸盘与挂件之间也设置有导柱及缓冲弹簧。
7.优选的,所述第一驱动件选用气缸,并安装于一转板上;所述第二驱动件选用电机,并连接有传动轮与传送带,进而驱动转板旋转;所述第三驱动件选用电缸。
8.优选的,所述载料治具及第三驱动件均设置两组,两个所述载料治具高度不同,其中一个载料治具直接与第三驱动件连接,另一个载料治具通过与第三驱动件连接的导向座进行连接,且高度低的载料治具可以从导向座下方穿过。
9.优选的,所述载料治具上端设置有缓冲层,所述缓冲层可选用橡胶层。
10.与现有技术相比,本实用新型的优点是:
11.本实用新型采用缓冲结构设计,通过第一真空缓冲吸盘与第二真空缓冲吸盘对胶带进行吸附,在其靠近胶带的过程中能够保证吸盘端面与胶带全接触,进而实现有效吸附,从而为后续的胶带贴附精度提供保障,本实用新型对长条型的胶带而言其效果更佳显著。
附图说明
12.下面结合附图及实施例对本实用新型作进一步描述:
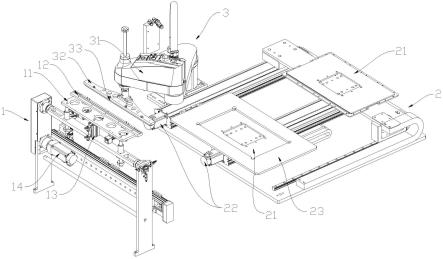
13.图1为本实用新型所述的一种胶带取放机构的结构示意图;
14.图2为本实用新型所述的一种胶带取放机构的局部放大图。
15.其中:1、待取料组件;
16.11、翻转平台,12、第一真空缓冲吸盘,13、第一驱动件,14、第二驱动件,15、定位销;
17.2、待放料组件;
18.21、载料治具,22、第三驱动件,23、胶框;
19.3、转移组件;
20.31、机械手,32、挂件,33、第二真空缓冲吸盘。
具体实施方式
21.下面结合具体实施例,对本实用新型的内容做进一步的详细说明:
22.如图1、图2所示,一种胶带取放机构,包括待取料组件1、待放料组件 2、以及转移组件3。
23.待取料组件1包括翻转平台11,安装于翻转平台11上的第一真空缓冲吸盘12,驱动翻转平台11直线运动的第一驱动件13,以及驱动翻转平台11翻转运动的第二驱动件14;其中,第一真空缓冲吸盘12呈长条型结构,可选用橡胶吸盘,也可在其与翻转平台11之间设置有导柱及缓冲弹簧,缓冲型结构使得对长条型的胶带吸附效果更好,保证第一真空缓冲吸盘12端面与胶带端面的吸附紧密性;本实施例中,第一真空缓冲吸盘12上具有与胶带形状相配合的定位销15,即胶带上自带有通孔,定位销15与通孔配合,能够保证胶带在吸附过程中的有效定位,防止位置偏差影响后续操作;再者,第一驱动件13选用气缸,并安装于一转板上;第二驱动件14选用电机,并连接有传动轮与传送带,进而驱动转板旋转。
24.待放料组件2包括载料治具21,以及驱动载料治具21直线运动的第三驱动件22;本实施例中,第三驱动件22选用电缸;载料治具21及第三驱动件 22均设置两组,两个载料治具21高度不同,其中一个载料治具21直接与第三驱动件22连接,另一个载料治具21通过与第三驱动件22连接的导向座进行连接,且高度低的载料治具21可以从导向座下方穿过;两个载料治具21 交替上料,有效保证工作效率;载料治具21上端设置有缓冲层,该缓冲层可选用橡胶层,由于工作时载料治具21上用于放置待贴附胶带的胶框23,因此当胶带贴附至胶框23的过程中,橡胶层也能起到缓冲作用,柔性结构相抵贴合,有效保证胶带的贴附效果。
25.转移组件3包括机械手31,安装于机械手31端部的挂件32及第二真空缓冲吸盘33;本实施例中,机械手31选用四轴机械手;第二真空缓冲吸盘33 呈长条型结构,可选用橡胶吸盘,也可在其与挂件32之间设置有导柱及缓冲弹簧,且第二真空缓冲吸盘33受机械手31驱动,往返于第一真空缓冲吸盘 12与载料治具21之间。
26.本实用新型工作时,首先第一真空缓冲吸盘12朝下,从上一工序处吸附胶带,吸附完成后,通过电机驱动翻转180
°
,使第一真空缓冲吸盘12朝上;与此同时,人工实现胶框23上料,将胶框23放置于载料治具21上,接着载料治具21受电缸驱动向待取料组件1一侧运
动;然后机械手31工作,驱动第二真空缓冲吸盘33从第一真空缓冲吸盘12上吸附胶带,并贴附于载料治具 21上方的胶框23上;贴附完成后,该载料治具21向远离待取料组件1一侧运动,另一个载料治具21向靠近待取料组件1一侧运动,继续贴附胶带;两个载料治具21交替上料,实现胶带的高效贴附。
27.上述实施例只为说明本实用新型的技术构思及特点,其目的在于让熟悉此项技术的人能够了解本实用新型的内容并据以实施,并不能以此限制本实用新型的保护范围。对于本领域技术人员而言,显然本实用新型不限于上述示范性实施例的细节,而且在不背离本实用新型的精神或基本特征的情况下,能够以其他的具体形式实现本实用新型,因此无论从哪一点来看,均应将实施例看作是示范性的,而且是非限制性的,本实用新型的范围由所附权利要求而不是上述说明限定,因此旨在将落在权利要求的等同要件的含义和范围内的所有变化囊括在本实用新型内。
技术特征:
1.一种胶带取放机构,其特征在于:包括待取料组件、待放料组件、以及转移组件;所述待取料组件包括翻转平台,安装于翻转平台上的第一真空缓冲吸盘,驱动翻转平台直线运动的第一驱动件,以及驱动翻转平台翻转运动的第二驱动件;所述待放料组件包括载料治具,以及驱动载料治具直线运动的第三驱动件;所述转移组件包括机械手,安装于机械手端部的挂件及第二真空缓冲吸盘;所述第一真空缓冲吸盘与第二真空缓冲吸盘均呈长条型结构,且所述第二真空缓冲吸盘受机械手驱动,往返于第一真空缓冲吸盘与载料治具之间。2.根据权利要求1所述的一种胶带取放机构,其特征在于:所述第一真空缓冲吸盘与第二真空缓冲吸盘均选用橡胶吸盘,且所述第一真空缓冲吸盘上具有与胶带形状相配合的定位销。3.根据权利要求1所述的一种胶带取放机构,其特征在于:所述第一真空缓冲吸盘与翻转平台之间设置有导柱及缓冲弹簧,所述第二真空缓冲吸盘与挂件之间也设置有导柱及缓冲弹簧。4.根据权利要求1~3任一项所述的一种胶带取放机构,其特征在于:所述第一驱动件选用气缸,并安装于一转板上;所述第二驱动件选用电机,并连接有传动轮与传送带,进而驱动转板旋转;所述第三驱动件选用电缸。5.根据权利要求1所述的一种胶带取放机构,其特征在于:所述载料治具及第三驱动件均设置两组,两个所述载料治具高度不同,其中一个载料治具直接与第三驱动件连接,另一个载料治具通过与第三驱动件连接的导向座进行连接,且高度低的载料治具可以从导向座下方穿过。6.根据权利要求5所述的一种胶带取放机构,其特征在于:所述载料治具上端设置有缓冲层,所述缓冲层选用橡胶层。
技术总结
本实用新型涉及一种胶带取放机构,包括待取料组件、待放料组件、以及转移组件;所述待取料组件包括翻转平台,安装于翻转平台上的第一真空缓冲吸盘,驱动翻转平台直线运动的第一驱动件,以及驱动翻转平台翻转运动的第二驱动件;所述待放料组件包括载料治具,以及驱动载料治具直线运动的第三驱动件;所述转移组件包括机械手,安装于机械手端部的挂件及第二真空缓冲吸盘;本实用新型采用缓冲结构设计,通过第一真空缓冲吸盘与第二真空缓冲吸盘对胶带进行吸附,在其靠近胶带的过程中能够保证吸盘端面与胶带全接触,进而实现有效吸附,从而为后续的胶带贴附精度提供保障,本实用新型对长条型的胶带而言其效果更佳显著。条型的胶带而言其效果更佳显著。条型的胶带而言其效果更佳显著。
技术研发人员:陈国仁
受保护的技术使用者:苏州奇达创机械有限公司
技术研发日:2022.01.20
技术公布日:2022/6/24
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1