一种基于红外感应的智能垃圾桶的制作方法
1.本实用新型涉及智能家具技术领域,具体涉及一种基于红外感应的智能垃圾桶。
背景技术:
2.目前有许多垃圾桶是脚踏式的,人们在使用完的纸巾或者其他生活垃圾,需要脚踩垃圾桶的脚踏开关才能打开垃圾桶扔纸巾,非常的麻烦。
3.现有公开号为cn208070599u的中国专利公开了一种基于红外感应的垃圾桶开盖控制系统,控制系统包括智能垃圾桶和智能纸巾盒;所述智能垃圾桶包括桶体、桶盖、用于驱动桶盖翻转的第一驱动机构以及用于控制所述第一驱动机构的第一控制器,所述第一控制器配置有第一无线通讯模块;所述智能纸巾盒用于盛放纸巾袋,其包括盒体、盒盖和安装于盒盖上的智能检测装置;所述智能检测装置包括第二控制器、第三控制器、高精度测距传感器、活动块、检测板和感应器;所述第三控制器安装于盒体底部的第二空腔内,并配置有第三无线通讯模块。本实用新型在一定程度上能够方便用户打开垃圾桶。
4.上述专利文献涉及的红外感应垃圾桶虽然实现了智能开关,但是仍然存在一些不足:
5.外筒体与内筒体为套接方式,即先将垃圾袋套在内桶体上,然后在套上外桶体,而在外桶体套接后,不能有效的将垃圾的外沿压实,若将外桶体与内筒体之间的间距变小,则可能导致在套接的过程中将垃圾袋刮破,进而不易提起,且在丢放一定重量的垃圾时,容易将在垃圾袋冲击导致外沿翻到外侧,进而不方便后续使用;其次,在垃圾桶使用过程中,例如打扫卫生,经常需要移动位置,垃圾桶直接与底板接触滑动中容易划伤底板。
技术实现要素:
6.为克服现有技术所存在的缺陷,现提供一种基于红外感应的智能垃圾桶,以解决背景技术中涉及的红外感应垃圾桶在使用中不能将垃圾袋外沿压实,且移动中容易划伤底板,导致使用效果偏差的问题。
7.为实现上述目的,提供一种基于红外感应的智能垃圾桶,包括:
8.外桶体和内桶体,所述外桶体的外侧上端设置有控制盒,且控制盒的上端转动连接有盖板,并且盖板的上端设置有红外感应器,所述外桶体的内壁开设有安装槽,且安装槽的内部设置有销轴,并且销轴的外侧转动连接有滑轮,所述内桶体设置在外桶体的内部,且内桶体的外壁开设有滑槽,所述内桶体的下端设置有内桶底,且内桶底的下端设置有固定滚珠。
9.进一步的,所述控制盒的内部设置有控制器、电源模块以及驱动结构,且驱动机构与盖板转动连接,并且控制器与红外感应模块电性连接,且控制器内部设置有延时断电模块,延时断电模块与驱动机构连接。
10.进一步的,所述外桶体设置为矩形框体结构,且矩形框体的上下端皆设置为敞口端。
11.进一步的,所述内桶体的上端设置有敞口端,且底部设置为封端,并且滑槽分别开设在内桶体的每侧外壁的中部。
12.进一步的,所述滑轮在外桶体的每侧外壁上下设置有三组,且滑轮与滑槽位置对应,滑轮的表面设置有橡胶层,并且滑轮的外侧滚动连接在滑槽的内部。
13.进一步的,所述外桶体的桶壁下端开设有圆柱形结构的减震槽,且减震槽的内侧设置有弹簧,并且弹簧的下端设置有滑块。
14.进一步的,所述滑块与减震槽的内槽壁滑动连接,且滑块的下端中部连接有接触块,并且接触块的下端设置为弧形面结构。
15.进一步的,所述接触块的下端设置有弹性滚珠,且弹性滚珠的两侧设置有定位块,并且定位块的内侧设置为弧形面结构,且定位块与弹性滚珠滚动连接。
16.本实用新型的有益效果在于,本实用新型的基于红外感应的智能垃圾桶利用外桶体外侧的控制盒,以及控制盒内部设置的驱动机构、控制器模块和电源模块,使得在盖板上端的红外感应器感应到物体时,将信号传递到控制器,然后通过驱动机构将盖板转动掀起,然后通过延时断电模块断开驱动机构电源,使得盖板自重落下,实现感应只能控制;利用滑轮和滑槽,使得在将垃圾袋套上内桶体后,垃圾袋外沿反扣在内桶体外沿,然后加尼龟外桶体的滑轮对准滑槽向下移动,进而将垃圾袋的外沿向下压实在滑槽内,有效避免了垃圾袋在垃圾冲击下外沿翻到外侧,便于使用;利用固定滚珠和弹性滚珠,便于将内桶体和外桶体同步移动,且弹性滚珠还起到外桶体的抗压性能,加强了实用性。
附图说明
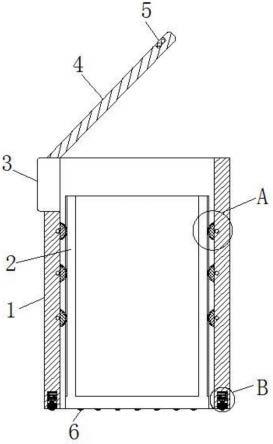
17.图1为本实用新型实施例的正视结构示意图。
18.图2为本实用新型实施例的俯视结构示意图。
19.图3为本实用新型实施例的图1中a处结构示意图。
20.图4为本实用新型实施例的图1中b处结构示意图。
21.1、外桶体;2、内桶体;3、控制盒;4、盖板;5、红外感应器;6、固定滚珠;7、安装槽;8、销轴;9、内桶底;10、滑轮;11、橡胶层;12、滑槽;13、减震槽;14、弹簧;15、滑块;16、接触块;17、定位块;18、弹性滚珠。
具体实施方式
22.以下通过特定的具体实例说明本实用新型的实施方式,本领域技术人员可由本说明书所揭露的内容轻易地了解本实用新型的其他优点与功效。本实用新型还可以通过另外不同的具体实施方式加以实施或应用,本说明书中的各项细节也可以基于不同观点与应用,在没有背离本实用新型的精神下进行各种修饰或改变。
23.图1为本实用新型实施例的正视结构示意图、图2为本实用新型实施例的俯视结构示意图、图3为本实用新型实施例的图1中a处结构示意图、图4为本实用新型实施例的图1中b处结构示意图。
24.参照图1至图4所示,本实用新型提供了一种基于红外感应的智能垃圾桶,包括:外桶体1、内桶体2、控制盒3、固定滚珠6和弹性滚珠18。
25.具体的,外桶体1的外侧上端设置有控制盒3,且控制盒3的上端转动连接有盖板4,
并且盖板4的上端设置有红外感应器5,外桶体1的内壁开设有安装槽7,且安装槽7的内部设置有销轴8,并且销轴8的外侧转动连接有滑轮10,内桶体2设置在外桶体1的内部,且内桶体2的外壁开设有滑槽12,内桶体2的下端设置有内桶底9,且内桶底9的下端设置有固定滚珠6。
26.在本实施例中,盖板4的内部开设有走线槽,便于通过导线将红外感应器和控制盒3内部电气元件电性连接。
27.红外感应器5设置在盖板4的开启端,便于手部动作感应。
28.固定滚珠6与内桶底9下端滚动连接。
29.控制盒3的内部设置有控制器、电源模块以及驱动结构,且驱动机构与盖板4转动连接,并且控制器与红外感应模块5电性连接,且控制器内部设置有延时断电模块,延时断电模块与驱动机构连接。
30.作为一种较佳的实施方式,电源模块设置为充电电池,便于更换使用。
31.延时断电模块设置从盖板4打开计时,设置为三至五秒断电关闭。
32.外桶体1设置为矩形框体结构,且矩形框体的上下端皆设置为敞口端。
33.作为一种较佳的实施方式,外桶体1上下端开口便于直接与内桶体2套接。
34.内桶体2的上端设置有敞口端,且底部设置为封端,并且滑槽12分别开设在内桶体2的每侧外壁的中部。
35.作为一种较佳的实施方式,内桶体2外侧的四组滑槽12,便于外桶体1定位滑动套接。
36.滑轮10在外桶体1的每侧外壁上下设置有三组,且滑轮10与滑槽12位置对应,滑轮10的表面设置有橡胶层11,并且滑轮10的外侧滚动连接在滑槽12的内部。
37.作为一种较佳的实施方式,滑轮10外侧的橡胶层11便于滚动中与内桶体2之间存在弹性挤压的作用力,便于将垃圾袋压实。
38.外桶体1的桶壁下端开设有圆柱形结构的减震槽13,且减震槽13的内侧设置有弹簧14,并且弹簧14的下端设置有滑块15。
39.作为一种较佳的实施方式,通过弹簧14和滑块15,便于弹性滚珠18起到向下的弹力作用。
40.滑块15与减震槽13的内槽壁滑动连接,且滑块15的下端中部连接有接触块16,并且接触块16的下端设置为弧形面结构。
41.作为一种较佳的实施方式,接触块16起到传递弹性作用力的介质,且接触块16的宽度小于两个定位块17之间的间距。
42.接触块16的下端设置有弹性滚珠18,且弹性滚珠18的两侧设置有定位块17,并且定位块17的内侧设置为弧形面结构,且定位块17与弹性滚珠18滚动连接。
43.作为一种较佳的实施方式,通过定位块17使得弹性滚珠18获得稳定的滚动空间,且弹性滚珠18下端低于外桶体1的底端。
44.本实用新型的基于红外感应的智能垃圾桶可有效解决背景技术中涉及的红外感应垃圾桶在使用中不能将垃圾袋外沿压实,且移动中容易划伤底板,导致使用效果偏差的问题,利用外桶体外侧的控制盒,以及控制盒内部设置的驱动机构、控制器模块和电源模块,使得在盖板上端的红外感应器感应到物体时,将信号传递到控制器,然后通过驱动机构
将盖板转动掀起,然后通过延时断电模块断开驱动机构电源,使得盖板自重落下,实现感应只能控制;利用滑轮和滑槽,使得在将垃圾袋套上内桶体后,垃圾袋外沿反扣在内桶体外沿,然后加尼龟外桶体的滑轮对准滑槽向下移动,进而将垃圾袋的外沿向下压实在滑槽内,有效避免了垃圾袋在垃圾冲击下外沿翻到外侧,便于使用;利用固定滚珠和弹性滚珠,便于将内桶体和外桶体同步移动,且弹性滚珠还起到外桶体的抗压性能,加强了实用性。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1