一种收缩夹取爪的制作方法
1.本实用新型涉及食品运输包装技术领域,尤其涉及一种收缩夹取爪。
背景技术:
2.蛋挞作为一种深受现代人喜欢的一种食物,而目前市面上的蛋挞大多是购买了蛋挞皮之后,进行二次加工制成的蛋挞,而现有的食品加工工厂中的生产出的蛋挞皮、饼干、膨化食品、烘焙半成品等,通过堆叠输送装置,运送到包装处,如公开号为cn110203448b记载的一种食品堆叠输送装置及其输送方法。
3.而在运送到包装处后,只能人工取下,然后进行打包,十分浪费时间,且工人进行打包也不易保证食品的卫生安全,因此目前通常会采用卡爪的方式对蛋挞进行取下,如公开号为cn113442153a中记载的一种收缩抓取装置,采用水平设置的多个平滑台式主气缸完成蛋挞的抓取,但是因为气缸的移动方向与受力方式是相互垂直的,容易导致气缸的损坏。
技术实现要素:
4.针对现有技术中所存在的不足,本实用新型提供了一种收缩夹取爪,其解决了现有的抓取蛋挞皮、饼干、膨化食品、烘焙半成品等的装置存在的气缸容易损坏的技术问题。
5.根据本实用新型的实施例记载的一种收缩夹取爪,包括爪座、竖直安装在所述爪座中心的主气缸与安装在所述爪座上且和主气缸传动连接的抓取爪,所述抓取爪包括对称设置的滑动块与安装在所述滑动块底部的卡爪,两个所述滑动块一端与爪座铰接,所述主气缸的活塞杆上铰接有两片动力片,两片所述动力片分别与两个滑动块另一端铰接。
6.本实用新型的技术原理为:采用竖直设置的主气缸,配合相互铰接的滑动块、爪座与动力片,将主气缸活塞杆的竖直运动变为卡爪的开合运动,使得夹取时受到的重力与主气缸移动方向相同,进而延长主气缸的使用寿命。
7.相比于现有技术,本实用新型具有如下有益效果:通过竖直设置的主气缸,配合抓取爪与爪座,其解决了现有的抓取蛋挞皮、饼干、膨化食品、烘焙半成品等的装置存在的气缸容易损坏的技术问题。
8.进一步的,所述爪座两侧设有两个伸缩连接杆,两个所述伸缩连接杆分别穿过两个滑动块与爪座的铰接位置,所述动力片与滑动块的铰接位置穿设有抓取连接杆。
9.进一步的,所述伸缩连接杆上轴向均布有3组抓取组,且每组所述抓取组中有两个抓取爪,两端位置的所述抓取组之间设有弹性伸缩机构,中间位置的所述抓取组与相邻的抓取组之间设有推动压缩机构,两端位置的所述抓取组中设有与爪座连接的无杆气缸。
10.通过一个主气缸驱动多个抓取爪实现抓取,有效降低的生产成本,同时弹性伸缩机构与推动压缩机构配合无杆气缸实现了收缩产品之间的距离,进而方便后续打包。
11.进一步的,两个所述伸缩连接杆的两端位置设有连接两个伸缩连接杆的固定片,所述无杆气缸两端分别固定在固定片与爪座上,所述无杆气缸的滑块与两端位置的抓取组中靠近外侧的抓取爪连接。
12.进一步的,所述伸缩连接杆中部设有与同一侧抓取连接杆连接的摆动块,所述伸缩连接杆两端都设有与同一侧抓取连接杆连接的旋转块。
13.进一步的,所述弹性伸缩机构包括两个动力块、连接两个所述动力块的限位杆与安装在两个所述抓取爪之间的压缩弹簧;所述两个动力块两端分别铰接连接同一个抓取爪的两个滑动块,最外侧的所述动力块中部连接无感主气缸的滑块,所述压缩弹簧套设在伸缩连接杆与抓取连接杆上。
14.进一步的,所述爪座四角设有连接块,两侧的两个所述连接块上分别穿过一根伸缩连接杆,中间位置的所述抓取组的两个抓取爪分别设置在两个连接块与摆动块之间。
15.进一步的,所述推动压缩组件包括两个推板、连接两个所述推板的连接板与安装在靠近所述伸缩连接杆端部的推板与连接块之间的推动弹簧;一块所述推板的两端分别铰接连接两根伸缩连接杆,且所述推板位于连接块外侧,另一块所述推板的两端分别铰接连接同一个抓取爪的两个滑动块,所述推动弹簧套设在伸缩连接杆上。
附图说明
16.图1为本实用新型实施例的收缩夹取爪的剖视图。
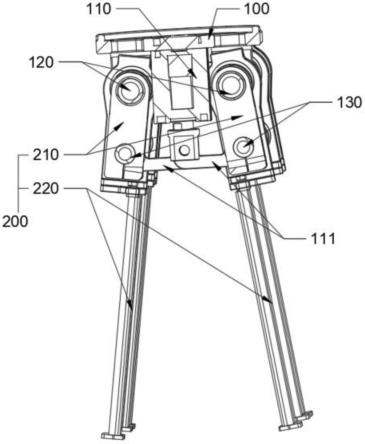
17.图2为本实用新型实施例的收缩夹取爪的主视图。
18.图3为本实用新型实施例的收缩夹取爪的俯视半剖视图。
19.上述附图中:100、爪座;110、主气缸;111、动力片;120、伸缩连接杆;121、固定片;122、摆动块;130、抓取连接杆;131、旋转块;140、无杆气缸;200、抓取爪;210、滑动块;220、卡爪;300、弹性伸缩机构;310、动力块;320、限位杆;330、压缩弹簧;400、推动压缩机构;410、推板;420、连接板;430、推动弹簧。
具体实施方式
20.下面结合附图及实施例对本实用新型中的技术方案进一步说明。
21.如图1所示的收缩夹取爪,包括爪座100、竖直安装在爪座100中心的主气缸110与安装在爪座100上且和主气缸110传动连接的抓取爪200,具体的抓取爪200包括对称设置的滑动块210与安装在滑动块210底部的卡爪220,形成一个类似夹子的结构,能完成物品的夹取,两个滑动块210一端与爪座100铰接,主气缸110的活塞杆上铰接有两片动力片111,两片动力片111分别与两个滑动块210另一端铰接,进而使得主气缸110能驱动卡爪220做开合运动。
22.如图1所示,爪座100两侧设有两个伸缩连接杆120,两个所述伸缩连接杆120分别穿过两个滑动块210与爪座100的铰接位置,作为铰接轴,动力片111与滑动块210的铰接位置穿设有抓取连接杆130,作为铰接轴。
23.如图2-3所示,伸缩连接杆120上轴向均布有3组抓取组,且每组抓取组中有两个抓取爪200,两端位置的抓取组之间设有弹性伸缩机构300,中间位置的抓取组与相邻的抓取组之间设有推动压缩机构400,两端位置的抓取组中设有与爪座100连接的无杆气缸140。
24.如图3所示,两个伸缩连接杆120的两端位置设有连接两个伸缩连接杆120的固定片121,无杆气缸140两端分别螺钉固定在固定片121于爪座100上,无杆气缸140的滑块与两端位置的抓取组中靠近外侧的抓取爪200螺钉连接,使得无杆气缸140能带动抓取组做相互
靠近的运动,且采用无杆气缸140,因为其体积小巧,占用的安装位置较少。
25.如图2所示,伸缩连接杆120中部设有与同一侧抓取连接杆130连接的摆动块122,伸缩连接杆120两端都设有与同一侧抓取连接杆130连接的旋转块131,摆动块122与旋转块131可以起到增强伸缩连接杆120与抓取连接杆130之间的稳定性。
26.如图2-3所示,弹性伸缩机构300包括两个动力块310、连接两个动力块310的限位杆320与安装在两个抓取爪200之间的压缩弹簧330;具体的两个动力块310两端分别铰接连接同一个抓取爪200的两个滑动块210,最外侧的动力块310中部连接无感主气缸110的滑块,限位杆320与内侧的动力块310是固定连接的,而限位杆320与最外侧的动力块310是采用活动连接的方式,即外侧的动力块310是可以沿限位杆320进行滑动的;压缩弹簧330套设在伸缩连接杆120与抓取连接杆130上,用于为两个滑动块210提供回弹力。
27.如图2-3所示,推动压缩组件包括两个推板410、连接两个推板410的连接板420与安装在靠近伸缩连接杆120端部的推板410与连接块之间的推动弹簧430;具体的一块推板410的两端分别铰接连接两根伸缩连接杆120,且推板410位于连接块外侧,使得推板410能沿伸缩连接杆120做往复移动,另一块推板410的两端分别铰接连接同一个抓取爪200的两个滑动块210,进而可以带动两个滑动块210运动,推动弹簧430套设在伸缩连接杆120上,提供回弹力。
28.收缩时,无杆气缸140带动两端的抓取组,向中部的抓取组靠近,直到两端抓取组接触到外侧的一块推板410时,无杆气缸140继续运动,压缩弹簧330与推动弹簧430同时受力被压缩,此时两端的抓取组除了继续靠近中部的抓取组外,本身的两个抓取爪200也在进行相互靠近,而中部的抓取组的两个抓取爪200被推板410推动往摆动块122靠近,直到抓取爪200贴紧摆动块122时,无杆气缸140停止工作,完成收缩。
29.张开时,无杆气缸140带动两端的抓取组,向两端运动,此时因为推动弹簧430的回弹力中部抓取组的两个抓取爪200往外被推回原来的位置,同时压缩弹簧330的回弹力,使得两端的抓取组的内的两个抓取爪200也相互做远离运动,当两端抓取组不接触推板410时,中部抓取组完成复位,两端抓取组内的两个抓取爪200的相对位置也完成复位,然后无杆气缸140继续运动,将两端的抓取组带回到原本的位置。
30.最后说明的是,以上实施例仅用以说明本实用新型的技术方案而非限制,尽管参照较佳实施例对本实用新型进行了详细说明,本领域的普通技术人员应当理解,可以对本实用新型的技术方案进行修改或者等同替换,而不脱离本实用新型技术方案的宗旨和范围,其均应涵盖在本实用新型的权利要求范围当中。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1