一种大型起重作业安全智能管控装置的制作方法
1.本实用新型涉及智能化施工技术领域,具体来说,涉及一种大型起重作业安全智能管控装置。
背景技术:
2.随着国家经济的快速发展,各个地区的建设力量也随之加大,但是由于施工现场地形复杂,设备众多,一般的塔吊装置存在视野盲区,无法知道现场存在的安全隐患,判断错误等引发的吊车吊臂误碰设备或危险点的隐患,一旦造成安全事故,严重影响工作人员的的生命财产安全。
技术实现要素:
3.针对相关技术中的上述技术问题,本实用新型提出一种大型起重作业安全智能管控装置,能够克服现有技术的上述不足。
4.为实现上述技术目的,本实用新型的技术方案是这样实现的:
5.一种大型起重作业安全智能管控装置,包括吊车,所述吊车后端设有底座,所述底座上设有操作室,所述操作室后端设有起重臂,所述起重臂左右两侧均设有单侧切面距离传感器,所述起重臂内部依次设有若干副起重臂,所述副起重臂顶部设有顶端全空间检测单元,所述底座两侧均设有用于限定操作室旋转角度的角度限位单元,所述操作室内设有现场声光报警器与装置控制终端。
6.更进一步的,若干所述副起重臂左右两侧均设有单侧切面距离传感器,所述起重臂与副起重臂上的单侧切面距离传感器均采用磁吸式固定。
7.更进一步的,所述顶端全空间检测单元采用机械夹具固定设置在副起重臂顶部。
8.更进一步的,所述单侧切面距离传感器、全空间检测单元、角度限位单元、现场声光报警器均通过无线wifi2.4g或5g传输信息。
9.更进一步的,所述顶端全空间检测单元包括一个360度扫描雷达和两个180度的全景摄像机。
10.更进一步的,所述现场声光报警器与装置控制终端均采用磁吸附固定在操作室内。
11.本实用新型的有益效果:通过智能管控装置的安装,使吊车具有视频与测距同步、能够适应各种场景、15米范围内感觉精准、抗干扰性能强的效果,消除了吊车在现场作业时因现场复杂、视野盲区、判断错误等引发的吊车吊臂误碰设备的隐患。
附图说明
12.为了更清楚地说明本实用新型实施例或现有技术中的技术方案,下面将对实施例中所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图仅仅是本实用新型的一些实施例,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据这
些附图获得其他的附图。
13.图1是根据本实用新型实施例所述的一种大型起重作业安全智能管控装置的工作模拟图;
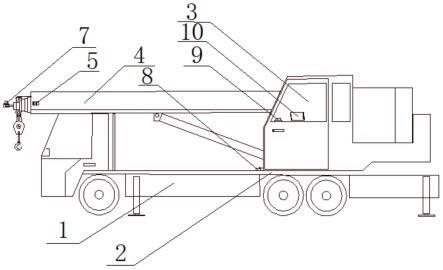
14.图2是根据本实用新型实施例所述的一种大型起重作业安全智能管控装置的安装示意图。
15.图中:1、吊车,2、底座,3、操作室,4、起重臂,5、单侧切面距离传感器,6、副起重臂,7、全空间检测单元,8、角度限位单元,9、声光报警器,10、装置控制终端。
具体实施方式
16.下面将结合本实用新型实施例中的附图,对本实用新型实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本实用新型一部分实施例,而不是全部的实施例。基于本实用新型中的实施例,本领域普通技术人员所获得的所有其他实施例,都属于本实用新型保护的范围。
17.如图1-2所示,根据本实用新型实施例所述的一种大型起重作业安全智能管控装置,包括吊车1,所述吊车1后端设有底座2,所述底座2上设有操作室3,所述操作室3后端设有起重臂4,所述起重臂4左右两侧均设有单侧切面距离传感器5,所述起重臂4内部依次设有若干副起重臂6,所述副起重臂6顶部设有顶端全空间检测单元7,所述底座2两侧均设有用于限定操作室3旋转角度的角度限位单元8,所述操作室3内设有现场声光报警器9与装置控制终端10。
18.在具体实施例中,若干所述副起重臂6左右两侧均设有单侧切面距离传感器5,所述起重臂4与副起重臂6上的单侧切面距离传感器5均采用磁吸式固定。
19.在具体实施例中,所述顶端全空间检测单元7采用机械夹具固定设置在副起重臂6顶部。
20.在具体实施例中,所述单侧切面距离传感器5、全空间检测单元7、角度限位单元8、现场声光报警器9均通过无线wifi2.4g或5g传输信息。
21.在具体实施例中,所述顶端全空间检测单元7包括一个360度扫描雷达和两个180度的全景摄像机。
22.在具体实施例中,所述现场声光报警器9与装置控制终端10均采用磁吸附固定在操作室3内。
23.为了方便理解本实用新型的上述技术方案,以下通过具体使用方式上对本实用新型的上述技术方案进行详细说明。
24.在具体使用时,根据本实用新型所述的
25.全空间检测单元7
26.顶部是一个雷达,360度扫描,左右是两个180度的全景摄像器,它安装在吊车副起重臂6的最顶端前侧,可自由拆装,并且不管吊臂处于任何角度和高度,装置都能保持水平;
27.作用是,当吊臂升高后,驾驶员不能在操作室3中准确判断吊臂顶端与周围物体的距离,此时他可以通过控制终端(平板电脑)来获取吊臂顶端的视频图像和雷达的点云成像,当距离小于设定值时,报警器会报警,避免吊臂误触电线等事故;
28.自稳水平大地布控、水平360
°
,垂直70
°
空间距离探测、360
°
全景无畸变实时视频
图像、最远探测距离30m,15m内可探测出直径5cm的球型物体、机械夹具固定安装、dc12v锂电池供电,无线wifi2.4g+5g双频传输,续航时间8h。
29.单侧切面距离探测器5
30.一个倒l形状的结构,左侧内部装有磁铁,上部是一个雷达,它通过磁吸方式安装在起重臂4和副起重臂6的中段,作用是,避免吊车1中部区域误碰到其他物体,当距离小于设定值时,报警器会报警;
31.平行于吊臂布控、180
°
切面探测,探测距离15m、磁吸式安装、dc5v锂电池供电,无线wifi传输、续航8h。
32.角度限位单元8
33.限位开关安装在吊车底座2上,限制他的左右旋转角度的范围。当超过限定范围后报警器会报警;
34.对吊臂水平旋转的角度浮动进行阈值预警、磁吸式布防、dc5v锂电池供电、无线wifi传输、续航8h。
35.声光报警器9
36.报警终端,报警时会有声光反馈。
37.主要包括近距离预警声光报警器和限位报警器,磁吸式布防、dc12v供电,无线wifi传输、dc12v锂电池供电,无线wifi传输、可单独与限位检测单元使用、续航8h。
38.装置控制终端10
39.驾驶员可以在终端上看到顶端全空间监测单元的视频图像和雷达成像情况。也可以在终端设置报警距离,报警角度等定值;
40.现场控制终端,实时显示吊车周围环境和限位状态,处理实时数据,对达到预警阈值的情况进行实时报警,并分别在视频图像和和点云图像中显示,配有随身充电设备。
41.综上所述,借助于本实用新型的上述技术方案,通过智能管控装置的安装,使吊车具有视频与测距同步、能够适应各种场景、15米范围内感觉精准、抗干扰性能强的效果,消除了吊车在现场作业时因现场复杂、视野盲区、判断错误等引发的吊车吊臂误碰设备的隐患。
42.以上所述仅为本实用新型的较佳实施例而已,并不用以限制本实用新型,凡在本实用新型的精神和原则之内,所作的任何修改、等同替换、改进等,均应包含在本实用新型的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1