一种机械手利用视觉系统实时纠偏进行玻璃摆放的设备的制作方法
1.本实用新型涉及自动化行业中组装技术领域,特指一种机械手利用视觉系统实时纠偏进行玻璃摆放的设备。
背景技术:
2.在自动化行业中,很多地方需要利用机械手进行组装、摆放,由于加工、装配误差,生产过程中治具的磨损变形等因素引起治具的一致性差,当治具或者摆放的容器出现空间性的误差时,普通的2d视觉已无法满足定位要求,由于通常视觉定位为二维定位,当治具出现空间内部误差,普通的二维定位无法检测出,机械手取放产品时容易将产品刮伤。
技术实现要素:
3.针对以上问题,本实用新型提供了一种机械手利用视觉系统实时纠偏进行玻璃摆放的设备,采用机械手配合视觉实时进行观看,通过视觉实时反馈,机械手可以不断进行轨迹修正,以最优的轨迹进行组装、摆放产品,实时纠偏,取放料机械手在精度较差,治具较高的场合有很大优势。
4.为了实现上述目的,本实用新型应用的技术方案如下:
5.一种机械手利用视觉系统实时纠偏进行玻璃摆放的设备,包括机罩、机架与大板,大板安装于机架上,机罩安装于大板上,机罩与大板之间形成有第一腔体,大板的一侧设有产品料盘上下料装置,大板的另一侧设有加压架上下料装置,产品料盘上下料装置与加压架上下料装置之间设有机械手装置,加压架上下料装置的上方安装有背光源,机架内形成有第二腔体,且机架内安装有实时纠偏模组,实时纠偏模组与加压架上下料装置对应设置,且实时纠偏模组与机械手装置电路连接。
6.根据上述方案,所述机械手装置包括6轴机械手、第二升降模组以及第一真空吸盘,6轴机械手的底座安装于产品料盘上下料装置与加压架上下料装置之间的大板上,第二升降模组安装于6轴机械手的自由端端部,第一真空吸盘安装于第二升降模组的输出端,并通过第二升降模组驱动上下动作。
7.根据上述方案,所述产品料盘上下料装置包括翻转二次定位机构、满料盘上料位、中转搬运移载机构、料盘二次定位机构、料盘移载搬运机构以及空料盘下料位,满料盘上料位安装于料盘二次定位机构的前方,空料盘下料位安装于料盘二次定位机构的后方,翻转二次定位机构安装于料盘二次定位机构的一侧,并与机械手装置对应设置,中转搬运移载机构安装于满料盘上料位与料盘二次定位机构之间,并与翻转二次定位机构对应设置,料盘移载搬运机构安装于满料盘上料位、料盘二次定位机构以及空料盘下料位的下方。
8.根据上述方案,所述满料盘上料位上设有堆叠分盘机构,堆叠分盘机构包括第一顶升模组、第二顶升模组、分盘模组、第一立板以及第一导向柱,第一立板安装于满料盘上料位,分盘模组与第一导向柱分别安装于第一立板上部,第一顶升模组与第二顶升模组呈上下安装于第一立板侧部。
9.根据上述方案,所述料盘二次定位机构包括短边基准销、长边基准销、第二立板、第一长边定位模组以及第一短边定位模组,第二立板安装于大板上,第二立板包括相对间隔安装于大板上的两块立板,短边基准销安装于第一块立板上,第一短边定位模组安装于第二块立板上,且第一短边定位模组与短边基准销呈相对设置,第一长边定位模组安装于第二立板一端的端部,长边基准销安装于第二立板另一端的端部,且第一长边定位模组与长边基准销呈相对设置,且第一长边定位模组与第一短边定位模组呈垂直设置。
10.根据上述方案,所述空料盘下料位上设有空盘堆叠结构,所述空盘堆叠结构包括第三立板、第二导向柱、第一升降模组以及止回机构,第三立板安装于大板上,第二导向柱与止回机构分别安装于第三立板上部,第一升降模组安装于第三立板侧部。
11.根据上述方案,所述中转搬运移载机构包括立柱、z轴升降模组、第二真空吸盘、y轴移栽模组,立柱安装于大上,y轴移栽模组安装于立柱上,z轴升降模组可沿y轴方向滑动地安装于y轴移栽模组上,第二真空吸盘安装于z轴升降模组的输出端,并通过z轴升降模组驱动沿z轴方向升降。
12.根据上述方案,所述翻转二次定位机构包括长边归正模组、短边归正模组、第一减速机、第一伺服电机以及翻转板,第一伺服电机安装于大板上,第一减速机安装于第一伺服电机的输出端,翻转板安装于第一减速机的输出端,长边归正模组安装于翻转板的两端,短边归正模组安装于翻转板的两侧,且长边归正模组与短边归正模组呈垂直设置。
13.根据上述方案,所述料盘移载搬运机构包括移载模组、第三顶升模组以及第四顶升模组,第三顶升模组与第四顶升模组间隔安装于移载模组上,并可在移载模组上沿x轴方向往返移动。
14.根据上述方案,所述加压架上下料装置包括空加压架上料位、加压架二次定位机构、满料加压架下料位以及加压架移载搬运机构,空加压架上料位安装于加压架二次定位机构的前方,满料加压架下料位安装于加压架二次定位机构的后方,加压架移载搬运机构安装于空加压架上料位、加压架二次定位机构以及满料加压架下料位的两侧,背光源安装于加压架二次定位机构的上方,实时纠偏模组安装于加压架二次定位机构的下方。
15.根据上述方案,所述加压架二次定位机构包括“口”字型基座、第二短边定位模组、长边基准块、旋转压紧气缸、短边基准块以及第二长边定位模组,第二短边定位模组与短边基准块呈相对安装于“口”字型基座的前后两侧板上,长边基准块与第二长边定位模组呈相对安装于“口”字型基座的左右两侧板上,旋转压紧气缸安装于长边基准块的旁边。
16.根据上述方案,所述加压架移载搬运机构包括联动传动轴、第二减速机、第二伺服电机、同步带、第三升降模组、夹紧模组、滑轨以及滑块,滑轨安装于空加压架上料位、加压架二次定位机构以及满料加压架下料位的两侧,且两侧的滑轨上均安装有滑块,两侧滑块均通过同步带与联动传动轴联动,联动传动轴安装于第二减速机的输出端,第二减速机安装于第二伺服电机的输出端,第三升降模组安装于滑块上,夹紧模组安装于第三升降模组的输出端。
17.根据上述方案,所述实时纠偏模组包括ccd图像传感器、y轴模组以及x轴模组,ccd图像传感器可沿y轴方向滑动地安装于y轴模组上,并与加压架上下料装置的加压架二次定位机构对应设置,y轴模组可沿x轴方向滑动地安装于x 轴模组上。
18.本实用新型有益效果:
19.本实用新型采用这样的结构设置,通过在大板的一侧设有产品料盘上下料装置,在大板的另一侧设有加压架上下料装置,并且在产品料盘上下料装置与加压架上下料装置之间设有机械手装置,该机械手装置工作时可用于将产品料盘上下料装置上的产品进行吸附,然后再在实时纠偏模组与背光源的配合作用下,使得机械手装置能准确将产品插入到加压架上下料装置的加压架上,而不会刮伤产品,其中,背光源设置在加压架上下料装置的上方,其主要用于打亮产品边缘、以及加压架的边缘,便于实时纠偏模组的相机抓取基准,其中,实时纠偏模组设置在加压架上下料装置的下方,其主要用于拍摄产品和加压架位置,并将位置信息传输至机械手装置,从而使得机械手装置实时调整产品与加压架的相对位置,确保在将产品插到加压架上时,不会刮伤产品。
附图说明
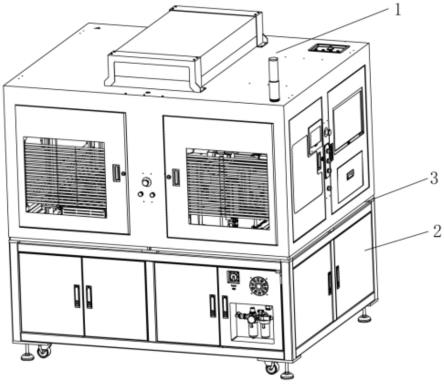
20.图1是本实用新型整体结构示意图;
21.图2是本实用新型大板装配示意图;
22.图3是本实用新型实时纠偏模组与加压架上下料装置装配示意图;
23.图4是本实用新型背光源与加压架上下料装置装配示意图;
24.图5是本实用新型机械手装置示意图;
25.图6是本实用新型堆叠分盘机构示意图;
26.图7是本实用新型料盘二次定位机构示意图;
27.图8是本实用新型空盘堆叠结构示意图;
28.图9是本实用新型中转搬运移载机构示意图;
29.图10是本实用新型翻转二次定位机构示意图;
30.图11是本实用新型料盘移载搬运机构示意图;
31.图12是本实用新型加压架二次定位机构示意图;
32.图13是本实用新型加压架移载搬运机构示意图;
33.图14是本实用新型实时纠偏模组示意图。
34.1.机罩;2.机架;3.大板;4.空加压架上料位;5.加压架二次定位机构;6.满料加压架下料位;7.加压架移载搬运机构;8.机械手装置;9.翻转二次定位机构;10. 满料盘上料位;11.中转搬运移载机构;12.料盘二次定位机构;13.料盘移载搬运机构;14.空料盘下料位;15.实时纠偏模组;16.背光源;17.第一顶升模组;18.第二顶升模组;19.分盘模组;20.第一升降模组;21.止回机构;22.第一长边定位模组;23.第一短边定位模组;24.移载模组;25.第三顶升模组;26.第四顶升模组;27. 长边归正模组;28.短边归正模组;29.第一减速机;30.第一伺服电机;31.6轴机械手;32.第二升降模组;33.第一真空吸盘;34.立柱;35.z轴升降模组;36.第二真空吸盘;37.y轴移栽模组;38.联动传动轴;39.第二减速机;40.第二伺服电机;41.同步带;42.第三升降模组;43.夹紧模组;44.第二短边定位模组;45.长边基准块;46.旋转压紧气缸;47.短边基准块;48.第二长边定位模组;49.ccd图像传感器;50.y轴模组;51.x轴模组;52.第一立板;53.第一导向柱;54.第二立板;55.第三立板;56.第二导向柱;57.翻转板;58.“口”字型基座;59.滑轨;60. 滑块;61.长边基准销;62.短边基准销。
具体实施方式
35.下面结合附图与实施例对本实用新型的技术方案进行说明。
36.如图1至图4所示,本实用新型所述一种机械手利用视觉系统实时纠偏进行玻璃摆放的设备,包括机罩1、机架2与大板3,大板3安装于机架2上,机罩 1安装于大板3上,机罩1与大板3之间形成有第一腔体,大板3的一侧设有产品料盘上下料装置,大板3的另一侧设有加压架上下料装置,产品料盘上下料装置与加压架上下料装置之间设有机械手装置8,加压架上下料装置的上方安装有背光源16,机架2内形成有第二腔体,且机架2内安装有实时纠偏模组15,实时纠偏模组15与加压架上下料装置对应设置,且实时纠偏模组15与机械手装置 8电路连接。以上构成本实用新型基本结构。
37.本实用新型采用这样的结构设置,通过在大板3的一侧设有产品料盘上下料装置,在大板3的另一侧设有加压架上下料装置,并且在产品料盘上下料装置与加压架上下料装置之间设有机械手装置8,该机械手装置8工作时可用于将产品料盘上下料装置上的产品进行吸附,然后再在实时纠偏模组15与背光源16的配合作用下,使得机械手装置8能准确将产品插入到加压架上下料装置的加压架上,而不会刮伤产品,其中,背光源16设置在加压架上下料装置的上方,其主要用于打亮产品边缘、以及加压架的边缘,便于实时纠偏模组15的相机抓取基准,其中,实时纠偏模组15设置在加压架上下料装置的下方,其主要用于拍摄产品和加压架位置,并将位置信息传输至机械手装置8,从而使得机械手装置8 实时调整产品与加压架的相对位置,确保在将产品插到加压架上时,不会刮伤产品。
38.如图5所示,所述机械手装置8包括6轴机械手31、第二升降模组32以及第一真空吸盘33,6轴机械手31的底座安装于产品料盘上下料装置与加压架上下料装置之间的大板3上,第二升降模组32安装于6轴机械手31的自由端端部,第一真空吸盘33安装于第二升降模组32的输出端,并通过第二升降模组32驱动上下动作。采用这样的结构设置,通过6轴机械手31将产品料盘上下料装置上的产品通过第一真空吸盘33进行吸附,然后再插入到加压架上下料装置的加压架上,其中,6轴机械手31采用6条臂拼接组成,可以方便调整第一真空吸盘33的高度与角度,其中,第二升降模组32可用于控制第一真空吸盘33上下,完成对产品的吸附。
39.在本实施例中,所述产品料盘上下料装置包括翻转二次定位机构9、满料盘上料位10、中转搬运移载机构11、料盘二次定位机构12、料盘移载搬运机构13 以及空料盘下料位14,满料盘上料位10安装于料盘二次定位机构12的前方,空料盘下料位14安装于料盘二次定位机构12的后方,翻转二次定位机构9安装于料盘二次定位机构12的一侧,并与机械手装置8对应设置,中转搬运移载机构11安装于满料盘上料位10与料盘二次定位机构12之间,并与翻转二次定位机构9对应设置,料盘移载搬运机构13安装于满料盘上料位10、料盘二次定位机构12以及空料盘下料位14的下方。采用这样的结构设置,其中,满料盘上料位10用于通过人工将装有产品的料盘放置上料;料盘二次定位机构12用于将料盘进行二次定位,便于中转搬运移载机构11取料;空料盘下料位14用于通过人工将空载的料盘进行集中收取完成下料,料盘移载搬运机构13用于将满料盘上料位10的满料料盘移载至料盘二次定位机构12,以及将料盘二次定位机构12 上的空载料盘移载至空料盘下料位14;中转搬运移载机构11用于将料盘二次定位机构12上的满料料盘上的产品进行中转至翻转二次定位机构9上;翻转二次定位机构9用于将从中转搬运移载机构11中转过来的产品进行翻转,便于机械手
装置8吸附。
40.如图6所示,所述满料盘上料位10上设有堆叠分盘机构,堆叠分盘机构包括第一顶升模组17、第二顶升模组18、分盘模组19、第一立板52以及第一导向柱53,第一立板52安装于满料盘上料位10,分盘模组19与第一导向柱53 分别安装于第一立板52上部,第一顶升模组17与第二顶升模组18呈上下安装于第一立板52侧部。采用这样的结构设置,通过堆叠分盘机构将人工放置的满料料盘进行分盘,方便料盘移载搬运机构13进行移载,其工作流程是:放置满料料盘时,第一顶升模组17与第二顶升模组18处于顶升状态,同时分盘模组 19处于回缩状态,将满料料盘依次堆叠至第一导向柱53内,此时第一顶升模组 17与最底下的满料料盘抵触,然后分盘模组19伸出将倒数第二个满料料盘进行夹紧,分盘时,第一顶升模组17与第二顶升模组18缩回,使最底下的满料料盘下降并落在料盘移载搬运机构13上,第一顶升模组17与第二顶升模组18再顶升至初始位,然后分盘模组19缩回,此时倒数第二个满料料盘为最底下的满料料盘,会落在第一顶升模组17上,分盘模组19再伸出将倒数第二个满料料盘进行夹紧,依次工作,完成分盘。
41.如图7所示,所述料盘二次定位机构12包括短边基准销62、长边基准销61、第二立板54、第一长边定位模组22以及第一短边定位模组23,第二立板54安装于大板3上,第二立板54包括相对间隔安装于大板3上的两块立板,短边基准销62安装于第一块立板上,第一短边定位模组23安装于第二块立板上,且第一短边定位模组23与短边基准销62呈相对设置,第一长边定位模组22安装于第二立板54一端的端部,长边基准销61安装于第二立板54另一端的端部,且第一长边定位模组22与长边基准销61呈相对设置,且第一长边定位模组22与第一短边定位模组23呈垂直设置。采用这样的结构设置,通过短边基准销62 与第一短边定位模组23配合实现对料盘的短边进行定位夹紧,通过长边基准销61与第一长边定位模组22配合实现对料盘的长边进行定位夹紧,从而实现对料盘xy方向的精准定位。
42.如图8所示,所述空料盘下料位14上设有空盘堆叠结构,空盘堆叠结构包括第三立板55、第二导向柱56、第一升降模组20以及止回机构21,第三立板 55安装于大板3上,第二导向柱56与止回机构21分别安装于第三立板55上部,第一升降模组20安装于第三立板55侧部。采用这样的结构设置,通过空盘堆叠结构用于将空载后的料盘进行堆叠收集,其工作流程是:通过料盘移载搬运机构 13将料盘二次定位机构12上空载的料盘进行输送至第二导向柱56内,初始状态下,第一升降模组20处于顶升状态,并超过止回机构21的位置,料盘依次堆叠在第一升降模组20上,并在止回机构21的作用下,料盘不会掉下,当数量达到一定时,第一升降模组20下降,并提醒用户,该次收集已完成。
43.如图9所示,所述中转搬运移载机构11包括立柱34、z轴升降模组35、第二真空吸盘36、y轴移栽模组37,立柱34安装于大板3上,y轴移栽模组37 安装于立柱34上,z轴升降模组35可沿y轴方向滑动地安装于y轴移栽模组37 上,第二真空吸盘36安装于z轴升降模组35的输出端,并通过z轴升降模组 35驱动沿z轴方向升降。采用这样的结构设置,z轴升降模组35可沿y轴方向滑动地安装于y轴移栽模组37上,便于调整z轴升降模组35在y轴移栽模组 37上的位置,调整好后,通过z轴升降模组35驱动第二真空吸盘36将产品进行吸附,并移载至翻转二次定位机构9上。
44.如图10所示,所述翻转二次定位机构9包括长边归正模组27、短边归正模组28、第一减速机29、第一伺服电机30以及翻转板57,第一伺服电机30安装于大板3上,第一减速机
29安装于第一伺服电机30的输出端,翻转板57安装于第一减速机29的输出端,长边归正模组27安装于翻转板57的两端,短边归正模组28安装于翻转板57的两侧,且长边归正模组27与短边归正模组28呈垂直设置。采用这样的结构设置,初始状态下,翻转板57与料盘二次定位机构12 呈同一侧,即与机械手装置8相反位置,此时机械手装置8不方便对产品进行吸附,通过第一伺服电机30驱动第一减速机29,第一减速机29再带动翻转板57 进行翻转,使翻转板57与机械手装置8呈同一侧,方便机械手装置8将产品进行吸附。其中,长边归正模组27与短边归正模组28用于将产品的长边与短边进行调整至与机械手装置8是的第一真空吸盘33对应。
45.如图11所示,所述料盘移载搬运机构13包括移载模组24、第三顶升模组 25以及第四顶升模组26,第三顶升模组25与第四顶升模组26间隔安装于移载模组24上,并可在移载模组24上沿x轴方向往返移动。采用这样的结构设置,通过第三顶升模组25与第四顶升模组26将料盘进行支撑,并在移载模组24上沿x轴方向往返移动,使得可以循环将料盘进行传送。
46.在本实施例中,所述加压架上下料装置包括空加压架上料位4、加压架二次定位机构5、满料加压架下料位6以及加压架移载搬运机构7,空加压架上料位 4安装于加压架二次定位机构5的前方,满料加压架下料位6安装于加压架二次定位机构5的后方,加压架移载搬运机构7安装于空加压架上料位4、加压架二次定位机构5以及满料加压架下料位6的两侧,背光源16安装于加压架二次定位机构5的上方,实时纠偏模组15安装于加压架二次定位机构5的下方。采用这样的结构设置,其中,空加压架上料位4用于人工将空加压架放置,加压架二次定位机构5用于将空加压架进行二次夹紧定位,满料加压架下料位6用于将满料的加压架进行堆叠收集,并下料,加压架移载搬运机构7用于将空加压架上料位4上的空加压架移载至加压架二次定位机构5,并将加压架二次定位机构5上满料的加压架移载至满料加压架下料位6进行堆叠。
47.如图12所示,所述加压架二次定位机构5包括“口”字型基座58、第二短边定位模组44、长边基准块45、旋转压紧气缸46、短边基准块47以及第二长边定位模组48,第二短边定位模组44与短边基准块47呈相对安装于“口”字型基座58的前后两侧板上,长边基准块45与第二长边定位模组48呈相对安装于“口”字型基座58的左右两侧板上,旋转压紧气缸46安装于长边基准块45 的旁边。采用这样的结构设置,通过第二短边定位模组44与短边基准块47配合实现对加压架的短边进行定位夹紧,通过长边基准块45与第二长边定位模组48 配合实现对加压架的长边进行定位夹紧,其中,旋转压紧气缸46用于调整加压架的位置,即将加压架进行旋转,使加压架的长边与长边基准块45、第二长边定位模组48对应,加压架的短边与第二短边定位模组44、短边基准块47对应,定位精准后,便于机械手装置8将产品插入到加压架上,不会刮伤产品。
48.如图13所示,所述加压架移载搬运机构7包括联动传动轴38、第二减速机 39、第二伺服电机40、同步带41、第三升降模组42、夹紧模组43、滑轨59以及滑块60,滑轨59安装于空加压架上料位4、加压架二次定位机构5以及满料加压架下料位6的两侧,且两侧的滑轨59上均安装有滑块60,两侧滑块60均通过同步带41与联动传动轴38联动,联动传动轴38安装于第二减速机39的输出端,第二减速机39安装于第二伺服电机40的输出端,第三升降模组42安装于滑块60上,夹紧模组43安装于第三升降模组42的输出端。采用这样的结构设置,通过
加压架移载搬运机构7将加压架进行移载,工作时,通过第二伺服电机40驱动第二减速机39,第二减速机39在联动传动轴38的作用下,带动两侧同步带41转动,使得滑块60在滑轨59上移动,其中,接收时,第三升降模组 42上升用于接收加压架,并通过夹紧模组43夹紧,防止移动过程中,加压架掉落,传送到指定位置后,再通过夹紧模组43松开,以及通过第三升降模组42 上升将加压架升至指定位置。
49.如图14所示,所述实时纠偏模组15包括ccd图像传感器49、y轴模组50 以及x轴模组51,ccd图像传感器49可沿y轴方向滑动地安装于y轴模组50 上,并与加压架上下料装置的加压架二次定位机构5对应设置,y轴模组50可沿x轴方向滑动地安装于x轴模组51上。采用这样的结构设置,在x轴模组51 与y轴模组50联动作用下,可调整ccd图像传感器49的位置,便于ccd图像传感器49对产品以及指定位置进行拍摄,再将位置信息传输至机械手装置8。
50.以上对本实用新型实施例中的技术方案进行了描述,但本实用新型并不局限于上述的具体实施方式,上述的具体实施方式仅仅是示意性的,而不是限制性的,本领域的普通技术人员在本实用新型的启示下,在不脱离本实用新型宗旨和权利要求所保护的范围情况下,还可做出很多形式,这些均属于本实用新型的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1