一种药材快速打包装置的制作方法
1.本实用新型涉及打包装置技术领域,具体涉及一种药材快速打包装置。
背景技术:
2.随着生活水平的不断提高,人们对传统医学越来越关注,中医治病中通常是服用中药,中药多是植物的根、茎、叶及果,和各类昆虫、动物等,都需要对其进行打包。目前的打包方式,均是需要有经验的配药师进行把控,人工打包、效率低下。
技术实现要素:
3.本实用新型的提供适用于药材快速打包装置,可设置需求的每包药材重量,进行自动化打包,保障药材的快速打包、精确打包前提下,还满足可实现程控制的功能,从而满足在复杂现实环境中的高质量准确打包的生产要求,可广泛用于中药材的打包装置领域。
4.本实用新型在一些实施方式中,可通过以下技术方案实现:
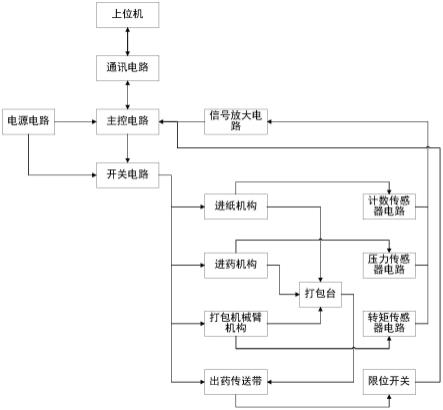
5.本实用新型的药材快速打包装置,被配置有上位机、通讯电路、主控电路、电源电路、开关电路、信号放大电路、传感器电路及执行电路。
6.进一步,其中上位机、通讯电路、主控电路及开关电路顺序电连接,其中电源电路分别与主控电路及开关电路电连接。
7.其中开关电路分别与执行电路的进纸机构、进药机构、打包机械臂机构及出药传送带的控制电路部分电连接。
8.其中传感器电路、信号放大电路及主控电路顺序电连接,其中传感器电路的计数传感器电路、压力传感器电路及转矩传感器电路分别与信号放大电路电连接。
9.上述方案中,其中进纸机构配合安装有用于测量包装纸输出情况的计数传感器电路,当给打包台放入一张纸后,计数传感器电路计数,进药机构开始动作;其中进药机构配合安装有用于测量药材重量的压力传感器电路,当添加药材达到设置的重量时,停止进药,开始打包机械臂机构动作;其中打包机械臂机构配合安装有用于测量每个方向机械臂转动角度的转矩传感器,当一个方向达到转矩后,下一个方向开始转动,当每个方向都将打包纸把药材包裹到位后,开始出药传送带动作;其中出药传送带配合安装限定传送带运动的限位开关,其中主控电路与限位开关电连接,当出药传送带达到限位开关后,药材打包完成。
10.其中进纸机构、进药机构、打包机械臂机构及出药传送带与打包台配合安装。
11.进一步,其中开关电路包括继电器j5、进纸机构b1、进药机构b2、打包机械臂机构b3、出药传送带b4、光耦隔离器j1、光耦隔离器芯片j2、光耦隔离器芯片j3、光耦隔离器芯片j4、防反二极管d1、防反二极管d2、防反二极管d3、防反二极管d4、保护电阻r1、保护电阻r2、保护电阻r3及保护电阻r4。
12.其中防反二极管d1正极接进纸机构控制动作信号,其中防反二极管d1负极接在光耦隔离器j1低压端正极,其中光耦隔离器j1低压端负极串联保护电阻r1 后接地,其中光耦隔离器j1高压端发射级接地,集电极接继电器j5脚41输入in0 上。
13.其中防反二极管d2正极接进药机构控制动作信号,其中防反二极管d2负极接在光耦隔离器j2低压端正极,其中光耦隔离器j2低压端负极串联保护电阻r2 后接地,其中光耦隔离器j2高压端发射级接地,集电极接继电器j5脚40输入in1 上。
14.其中防反二极管d3正极接打包机械臂机构控制动作信号,其中防反二极管 d3负极接在光耦隔离器j3低压端正极,其中光耦隔离器j3低压端负极串联保护电阻r3后接地,其中光耦隔离器j3高压端发射级接地,集电极接继电器j5 脚39输入in2上。
15.其中防反二极管d4正极接出药传送带控制动作信号,其中防反二极管d4负极接在光耦隔离器j4低压端正极,其中光耦隔离器j4低压端负极串联保护电阻 r4后接地,其中光耦隔离器j4高压端发射级接地,集电极接继电器j5脚38输入in3上。
16.其中继电器j5脚42接地,脚43接电源;其中继电器j5脚45、48、51、54 公共端com4-com1均接地;其中继电器j5脚54常开触点no1串联进纸机构b1 的负极,且正极接220v电源;其中继电器j5脚50常开触点no2串联进药机构b2 的负极,且正极接220v电源;其中继电器j5脚47常开触点no3串联打包机械臂机构b3后接220v工频电源;其中继电器j5脚44常开触点no4串联出药传送带b4的负极,且正极接220v电源。
17.上述方案中,二极管d1-d4都用于防止信号反接保护光耦隔离器j1-j4的低压侧,电阻r1-r4保护光耦隔离器j1-j4的低压侧接地。光耦隔离器j1-j4的高压侧将对应的控制信号送入继电器输入端in0-in3对应控制继电器输出常开触点动作,从而实现了低压的控制信号控制了高压的进纸机构、进药机构、打包机械臂机构及出药传送带对应动作。
18.进一步,其中进纸机构与进药机构采用调速电动机动作,其中打包机械臂机构采用伺服电机控制,其中出药传送带采用减速电机驱动。
19.上述方案中,打包机械臂机构采用伺服电机控制,伺服电机动作的同时电机自带的编码器反馈信号给驱动器,驱动器根据反馈值与目标值进行比较,调整转子转动的角度,从而实现打包机械臂精准打包动作。出药传送带采用减速电机驱动,因为减速机在传动中有保护电机的作用,运行中传送带会承受较大扭矩,过载时减速电机可以通过减速来实现保护电机的目的。
20.进一步,其中传感器电路包括采用光电开关传感器的计数传感器电路、采用低功耗高精度i2c数字输出压力传感器变送器的压力传感器电路及采用sk-n102 静态转矩传感器的转矩传感器电路。
21.进一步,其中信号放大电路采用icl7650斩波稳零式高精度运算放大器。
22.进一步,其中主控电路采用at89c51单片机。
23.进一步,其中开关电路采用光耦隔离芯片和继电器。
24.进一步,其中通讯装置采用2g/4g及wifi模块。
25.由于上述技术方案和现有技术相比,本实用新型的技术方案至少具备以下有益效果:
26.1.本实用新型药材快速打包装置,给药材打包无需人工,清洁无污染,可远程控制,具备实时监测的功能,出现问题立即可报警。
27.2.本实用新型药材快速打包装置,可设置需求的每包药材重量,进行自动化打包,对纸张生产的打包过程实现了自动化,可精准打包。
28.3.本实用新型药材快速打包装置,通过单片机对信息的分析和处理、发出相应的
指令,调整系统的工作平稳,构成了一个可自动可人工控制打包的系统,环保节能、通用性强、可靠性高等特点。
附图说明
29.此处的附图被并入说明书中并构成本说明书的装置,示出符合本发明的实施例,并与说明书一起用于解释本发明的原理,本实用新型的特征、目的和优点将变得更加显而易见,下面描述中的附图仅仅是本发明的一些实施例,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据这些附图获得其他的附图,对本实施例的附图作简要说明如下。
30.图1为本实用新型的控制系统结构图;
31.图2为本实用新型的开关电路图。
具体实施方式
32.下面将以优选实施例为例来对本实用新型进行详细地描述示例实施方式。然而,示例实施方式能够以多种形式实施,且不应被理解为限于在此阐述的范例;相反,提供这些实施方式使得本发明将更加全面和完整,并将示例实施方式的构思全面地传达给本领域的技术人员,但是本领域技术人员应当理解,以下所述仅仅是举例说明和描述一些优选实施方式,对本实用新型的权利要求并不具有任何限制。
33.以下,对本实用新型的实施例进行说明:
34.本实用新型的药材快速打包装置,被配置有上位机、通讯电路、主控电路、电源电路、开关电路、信号放大电路、传感器电路及执行电路。
35.在一个实施例中,其中上位机、通讯电路、主控电路及开关电路顺序电连接,其中电源电路分别与主控电路及开关电路电连接。
36.其中开关电路分别与执行电路的进纸机构、进药机构、打包机械臂机构及出药传送带的控制电路部分电连接。
37.其中传感器电路、信号放大电路及主控电路顺序电连接,其中传感器电路的计数传感器电路、压力传感器电路及转矩传感器电路分别与信号放大电路电连接。
38.在上述实施例中,其中进纸机构配合安装有用于测量包装纸输出情况的计数传感器电路,当给打包台放入一张纸后,计数传感器电路计数,进药机构开始动作;其中进药机构配合安装有用于测量药材重量的压力传感器电路,当添加药材达到设置的重量时,停止进药,开始打包机械臂机构动作;其中打包机械臂机构配合安装有用于测量每个方向机械臂转动角度的转矩传感器,当一个方向达到转矩后,下一个方向开始转动,当每个方向都将打包纸把药材包裹到位后,开始出药传送带动作;其中出药传送带配合安装限定传送带运动的限位开关,其中主控电路与限位开关电连接,当出药传送带达到限位开关后,药材打包完成。
39.其中进纸机构、进药机构、打包机械臂机构及出药传送带与打包台配合安装。
40.在一个实施例中,其中开关电路包括继电器j5、进纸机构b1、进药机构 b2、打包机械臂机构b3、出药传送带b4、光耦隔离器j1、光耦隔离器芯片j2、光耦隔离器芯片j3、光耦隔离器芯片j4、防反二极管d1、防反二极管d2、防反二极管d3、防反二极管d4、保护电阻r1、保
护电阻r2、保护电阻r3及保护电阻r4。
41.其中防反二极管d1正极接进纸机构控制动作信号,其中防反二极管d1负极接在光耦隔离器j1低压端正极,其中光耦隔离器j1低压端负极串联保护电阻r1 后接地,其中光耦隔离器j1高压端发射级接地,集电极接继电器j5脚41输入in0 上。
42.其中防反二极管d2正极接进药机构控制动作信号,其中防反二极管d2负极接在光耦隔离器j2低压端正极,其中光耦隔离器j2低压端负极串联保护电阻r2 后接地,其中光耦隔离器j2高压端发射级接地,集电极接继电器j5脚40输入in1 上。
43.其中防反二极管d3正极接打包机械臂机构控制动作信号,其中防反二极管 d3负极接在光耦隔离器j3低压端正极,其中光耦隔离器j3低压端负极串联保护电阻r3后接地,其中光耦隔离器j3高压端发射级接地,集电极接继电器j5 脚39输入in2上。
44.其中防反二极管d4正极接出药传送带控制动作信号,其中防反二极管d4负极接在光耦隔离器j4低压端正极,其中光耦隔离器j4低压端负极串联保护电阻 r4后接地,其中光耦隔离器j4高压端发射级接地,集电极接继电器j5脚38输入in3上。
45.其中继电器j5脚42接地,脚43接电源;其中继电器j5脚45、48、51、54 公共端com4-com1均接地;其中继电器j5脚54常开触点no1串联进纸机构b1 的负极,且正极接220v电源;其中继电器j5脚50常开触点no2串联进药机构b2 的负极,且正极接220v电源;其中继电器j5脚47常开触点no3串联打包机械臂机构b3后接220v工频电源;其中继电器j5脚44常开触点no4串联出药传送带b4的负极,且正极接220v电源。
46.在上述实施例中,二极管d1-d4都用于防止信号反接保护光耦隔离器j1-j4 的低压侧,电阻r1-r4保护光耦隔离器j1-j4的低压侧接地。光耦隔离器j1-j4 的高压侧将对应的控制信号送入继电器输入端in0-in3对应控制继电器输出常开触点动作,从而实现了低压的控制信号控制了高压的进纸机构、进药机构、打包机械臂机构及出药传送带对应动作。
47.在一个实施例中,其中进纸机构与进药机构采用调速电动机动作,其中打包机械臂机构采用伺服电机控制,其中出药传送带采用减速电机驱动。
48.在上述实施例中,打包机械臂机构采用伺服电机控制,伺服电机动作的同时电机自带的编码器反馈信号给驱动器,驱动器根据反馈值与目标值进行比较,调整转子转动的角度,从而实现打包机械臂精准打包动作。出药传送带采用减速电机驱动,因为减速机在传动中有保护电机的作用,运行中传送带会承受较大扭矩, 过载时减速电机可以通过减速来实现保护电机的目的。
49.在一个实施例中,其中传感器电路包括采用光电开关传感器的计数传感器电路、采用低功耗高精度i2c数字输出压力传感器变送器的压力传感器电路及采用 sk-n102静态转矩传感器的转矩传感器电路。
50.在一个实施例中,其中信号放大电路采用icl7650斩波稳零式高精度运算放大器。
51.在一个实施例中,其中主控电路采用at89c51单片机。
52.在一个实施例中,其中开关电路采用光耦隔离芯片和继电器。
53.在一个实施例中,其中通讯装置采用2g/4g及wifi模块。
54.本实用公开一种药材快速打包装置,并设计了其安全合理的电路图,可设置需求的每包药材重量,进行自动化打包,保障药材的快速打包、精确打包前提下,还满足可实现程控制的功能,从而满足在复杂现实环境中的高质量准确打包的生产要求,可广泛用于中
药材的打包装置领域。
55.以上结合附图将药材快速打包装置的具体实施例对本实用新型进行详细的描述。但是,本领域技术人员应当理解,以上所述仅仅是举例说明和描述一些具体实施方式,对本实用新型的范围,尤其是权利要求的范围,并不具有任何限制。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1