一种数字型移动抓取装箱装置的制作方法
1.本实用新型涉及一种将产品抓取装箱装置。
背景技术:
2.目前市面上使用的同类产品的抓取方式行走路线都是x轴y轴联动形式,该方式控制的点步骤多,需要的驱动以及检测开关会增多,加大了制造成本以及后期的维护保养成本。
技术实现要素:
3.为了克服背景技术中存在的问题,本实用新型提供了一种数字型移动抓取装箱装置,该装置通过单驱动机构驱动行走,减少了动力机构及检测点的设置,从而具有结构简单、操作方便的优点,减少了后期的维护保养成本,提高了使用效率。
4.为解决上述技术问题,本实用新型的技术方案如下:
5.一种数字型移动抓取装箱装置,包括设置在两条并行输送带上方的抓手固定移动组件和带动抓手固定移动组件在两条输送带之间移动的驱动组件,所述驱动组件包括一由驱动机构驱动的闭合链条,所述闭合链条包括两个竖直段和位于两个竖直段之间的水平段,每个竖直段对应设置在一条输送带上方,所述抓手固定移动组件固定在所述闭合链条上,闭合链条转动后,带动抓手固定移动组件从其中一个竖直段经水平段转移至另外一个竖直段。
6.所述闭合链条具有四个转角,其中位于上方的两个转角处设置有传动从动大链轮,位于下方的两个转角处设置有从动链轮,两个传动从动大链轮之间的链条构成水平段,传动从动大链轮与从动链轮之间的链条构成竖直段。
7.两个从动链轮之间设置有驱动链轮,驱动链轮由驱动机构驱动转动。
8.还包括有涨紧链轮,所述涨紧链轮设置在驱动链轮的上方用于保持闭合链条的涨紧。
9.所述驱动机构包括伺服电机和涡轮减速机,所述伺服电机通过涡轮减速机与驱动链轮相连。
10.所述驱动组件还包括水平直线导轨和竖直直线导轨,所述水平直线导轨设置在所述水平段的上方,所述竖直直线导轨设置在其中一个竖直段的外侧。
11.所述驱动组件还包括链条导向机构,所述链条导向机构包括竖直导向板和水平导向托板,所述竖直导向板设置在竖直段的两侧,所述水平导向托板设置在水平段的下方。
12.抓手固定移动组件包括抓手固定框架和设置在抓手固定框架下方的多个定制抓手。
13.所述定制抓手可相对抓手固定框架移动。
14.所述抓手固定框架上设置有抓手气缸,抓手气缸的伸出臂与位于最侧边的一个定制抓手固定相连,相邻的定制抓手之间设置有分离间隔条。
15.本实用新型具有的技术效果:该装置通过单驱动机构驱动行走,减少了动力机构及检测点的设置,从而具有结构简单、操作方便的优点,减少了后期的维护保养成本,提高了使用效率。
附图说明
16.下面结合附图对本实用新型做进一步说明
17.图1为本实用新型所述装置的整体结构示意图;
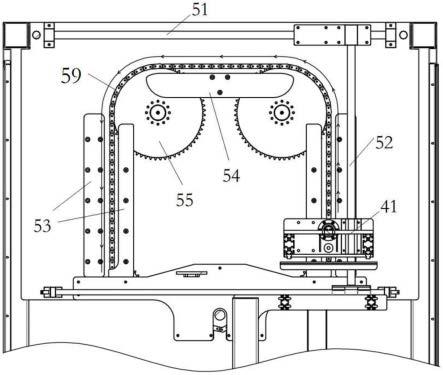
18.图2为图1中传动组件的结构示意图;
19.图3为图2中传动组件的链条布置结构示意图;
20.图4为图2中传动组件的背面结构示意图;
21.图5为图1中抓手固定移动组件的结构示意图。
22.其中:
23.10-主框架;20-包装箱输送带;30-瓶子输送带;40-抓手固定移动组件;41-抓手固定框架;42-分离气缸;43-分离间隔条;44-定制抓手;50-传动组件;51-水平直线导轨;52-竖直直线导轨;53-竖直导向板;54-水平导向托板;55-传动从动大链轮;56-驱动链轮;57-涨紧链轮;58-从动链轮;59-闭合链条;61-伺服电机;62-涡轮减速机。
具体实施方式
24.本实用新型提供了一种数字型移动抓取装箱装置,该装置可完成将瓶子抓取后装入包装箱的过程。
25.如图1所示,一种数字型移动抓取装箱装置,包括主框架10,主框架上水平设置有两条并行的两条输送带:包装箱输送带20和瓶子输送带30,两条输送带的上方设置有抓手固定移动组件40,主框架10的侧面上设置有驱动组件50,驱动组件50带动抓手固定移动组件40在两条输送带之间移动,将瓶子输送带30上行进的瓶子抓取后移动至包装箱输送带20上的包装箱内。
26.驱动组件的结构如图2-3所示,驱动组件包括由驱动机构驱动的闭合链条59,闭合链条59包括两个竖直段和位于两个竖直段之间的水平段,每个竖直段对应设置在一条输送带上方,抓手固定移动组件固定在所述闭合链条59上,闭合链条转动后,带动抓手固定移动组件从其中一个竖直段经水平段转移至另外一个竖直段。
27.如图3所示,闭合链条59具有四个转角,其中位于上方的两个转角处设置有传动从动大链轮55,位于下方的两个转角处设置有从动链轮58,两个传动从动大链轮55之间的链条构成水平段,传动从动大链轮55与从动链轮58之间的链条构成竖直段。两个从动链轮58之间设置有驱动链轮56,驱动链轮由设置在背面的驱动机构驱动转动,图4为图3的背面结构示意图,其具有伺服电机61和涡轮减速机62,两者构成了驱动机构,伺服电机61通过涡轮减速机62与驱动链轮56相连。伺服电机61启动后,带动驱动链轮56转动,进而带动整个闭合链条59的运动。
28.为了保证闭合链条59的涨紧,驱动链轮56的上方设置有两个与闭合链条59啮合的涨紧链轮57。
29.驱动组件还包括链条导向机构,链条导向机构包括竖直导向板53和水平导向托板
54,竖直导向板53设置在竖直段的两侧,水平导向托板54设置在水平段的下方,通过设置链条导向机构,可以保证闭合链条在水平段和竖直段按水平和竖直方向移动。
30.为了保证抓手固定移动组件以直线形式运动,驱动组件还包括水平直线导轨51和竖直直线导轨52,水平直线导轨51设置在所述水平段的上方,竖直直线导轨52设置在其中一个竖直段的外侧,抓手固定移动组件40上设置有与两个直线导轨嵌合的插槽,以保证抓手固定移动组件在升降和水平移动时保持直线。
31.如图5所示,抓手固定移动组件40包括抓手固定框架41和设置在抓手固定框架下方的多个定制抓手44,定制抓手44可相对抓手固定框架41移动,抓手固定框架上41设置有抓手气缸42,抓手气缸42的伸出臂与位于最侧边的一个定制抓手44固定相连,相邻的定制抓手44之间设置有分离间隔条43。通过抓手气缸42及分离间隔条43,可实现定制抓手44之间的距离可调节。
32.本实用新型所述的移动抓取装箱装置的工作原理为:
33.瓶子从瓶子输送带30的进口方向(图1中箭头所指的方向)进入,待瓶子全部到位后,抓手固定移动组件40就会下降,下降到位后定位抓手44就会将瓶子抓取,接着在伺服电机的带动下,抓手固定移动组件40会上升,然后水平移动至包装箱输送带10上方,当包装箱输送带10上的包装箱到位后,抓手移动固定组件40下降,降至距离纸箱一定高度后就松开定制抓手44,此时瓶子即装入到了纸箱内部,随后抓手固定移动组件40就会沿着运动轨迹回到瓶子输送带上方,进而继续下一步循环动作。
34.以上所述仅为本实用新型的较佳实施例,对实用新型而言仅仅是说明性的,而非限制性的。本专业技术人员理解,在实用新型权利要求所限定的精神和范围内可对其进行许多改变,修改,甚至等效,但都将落入本实用新型的保护范围内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1