一种爬拱吊机牵引锚固系统的制作方法
1.本实用新型涉及爬拱吊机牵引技术领域,具体为一种爬拱吊机牵引锚固系统。
背景技术:
2.清水塘大桥主桥主跨钢桁拱采用爬拱吊机悬臂拼装工艺,爬拱吊机在安装作业过程中通过轨道梁进行移动,这需要轨道不断进行前移动作,同时爬拱吊机在吊装作业过程中,需要锚固稳定,保证安全,为满足上述功能,需发明一种牵引锚固系统来实现轨道梁移动和吊机锚固的功能。
技术实现要素:
3.本实用新型的目的在于提供一种爬拱吊机牵引锚固系统,其通过锚固机构,以及传动组件等,实现了轨道梁的稳定移动。
4.为实现上述目的,本实用新型采用如下技术方案:
5.一种爬拱吊机牵引锚固系统,包括,
6.钢梁,所述钢梁形成带有宽度和长度的支撑面;
7.轨道梁,沿所述钢梁的长度方向,所述轨道梁铺设于所述钢梁上,并通过所述支撑面进行支撑;
8.爬拱吊机,所述爬拱吊机设置于所述轨道梁上,且所述爬拱吊机底部设置有沿所述轨道梁运动的行走机构;
9.锚固机构,所述锚固机构设置有第一动力机构,所述第一动力机构驱动锚固机构以及位于锚固机构上的传动组件,进而通过传动组件,带动轨道梁运动,以实现轨道梁沿钢梁上的移动。
10.本技术方案中,通过增加锚固机构,在轨道进行移动时,锚固机构能够提供动力,使其在完成一段的施工后,能够继续进行移动,挪动到下一段中,实现对于下一段的施工。
11.本技术方案中,增加了传动组件,进而传动组件,连接了锚固机构和爬拱吊机,在爬拱吊机进行移动或者换位时,能够抵消爬拱吊机的下滑力,防止爬拱吊机倾覆。
12.本技术方案中,通过拽拉轨道的方法最大限度的利用了轨道梁,避免了在钢结构桥面上重新建立一条钢轨道,直接减少了轨道的材料和建设成本,拆装方便,节约时间,大大提升了工效,同时在爬拱吊机吊装作业过程中,还可以通过钢绞线稳固爬拱吊机,保证吊装作业安全。
13.作为本实用新型的进一步改进,还包括位于爬拱吊机前方的行走千斤顶,所述爬拱吊机在所述行走千斤顶的作用下,沿所述轨道梁移动。
14.本技术方案中,利用行走千斤顶,能够带动爬拱吊机在完成一段的施工后,使得爬拱吊机在轨道梁上进行移动,进行下一段的爬拱吊机起吊施工等。
15.作为本实用新型的进一步改进,沿所述钢梁,所述锚固机构设置于爬拱吊机远离行走千斤顶的方向,且所述锚固机构设置于所述轨道梁移动方向的反向位置上。
16.本技术方案中,锚固机构远离行走千斤顶设置,进而两者具有一定的拉扯力,此时在爬拱吊机移动时,锚固机构产生与之移动相反的力,进行形成拉扯力,能够防止倾覆。
17.作为本实用新型的进一步改进,还包括位于爬拱吊机与锚固机构之间的剪力柱,所述剪力柱穿过所述传动组件设置于所述钢梁上。
18.本技术方案中,爬拱吊机和锚固机构的运动中,承受的力比较大,且对于传动组件而言,一般选用绳索等,此时需要考虑垂直方向的受力以及支撑,剪力柱的增加,承受上述爬拱或锚固中的荷载。具体地,剪力柱为柱状的墙体结构。
19.作为本实用新型的进一步改进,还包括靠近锚固机构设置的剪力柱加劲板,所述剪力柱加劲板位于所述传动组件与所述钢梁之间。
20.本技术方案中,增加剪力柱加劲板,其设置在钢梁和传动组件之间,使得传动组件在水平上有一定的支撑,且其呈梯形设置,使得剪力柱的侧部进一步强度增加。
21.作为本实用新型的进一步改进,所述剪力柱加劲板一侧与所述剪力柱贴合,另一侧形成带有引导面的斜面结构。
22.本技术方案中,剪力柱加劲板设置成斜面使得形成倾斜的支撑力,增加了强度的支撑。
23.作为本实用新型的进一步改进,所述传动组件为钢绞绳组件,所述钢绞绳组件与所述轨道梁连接后,穿过所述锚固机构并固定于所述第一动力机构上。
24.本技术方案中,传动组件穿过锚固机构设置,进而在轨道梁运动中,其与轨道梁和锚固机构的连接更加牢固,不会断开,稳定性更好。
25.作为本实用新型的进一步改进,还包括爬拱吊机与锚固机构连接的连接件,所述连接件位于传动组件上方,且所述连接件连接有第二动力机构。
26.本技术方案中,连接件设置在上方,传动组件设置在下方,形成两层的连接线,进而在拉扯或移动中,上下两处进行连接,形成面积更大的联结力,进而防倾覆效果更好。
27.作为本实用新型的进一步改进,所述第二机构为千斤顶,所述第二动力机构位于第一动力机构上方,且所述传动组件以及连接件形成防倾覆结构。
28.本技术方案中,两个动力机构也分别上下设置,进而使得传动组件和连接件均具有一定的拉扯点,使得其拉扯时,承受力更大。
附图说明
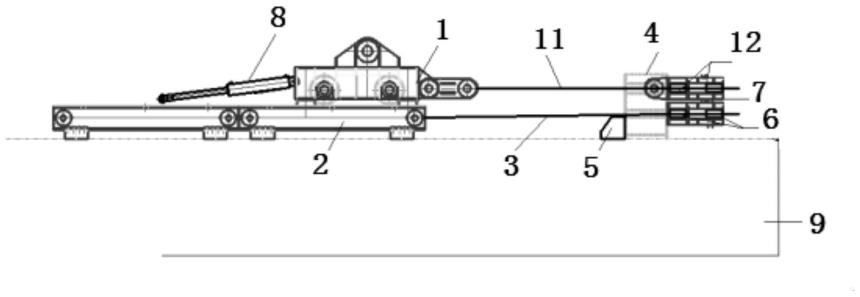
29.图1为本实用新型提供的一种爬拱吊机牵引锚固系统的结构示意图;
30.图2为本实用新型提供的锚固机构与行走机构的组装图;
31.图中:
32.1、爬拱吊机;2、轨道梁;3、传动组件;4、剪力柱;5、剪力柱加劲板;6、第一动力机构;7、锚固机构;71、连接梁;72、拽拉器;73、锚固夹片;8、走行千斤顶;9、钢梁;10、行走机构;11、连接件;12、第二动力机构。
具体实施方式
33.以下结合附图对本实用新型的原理和特征进行描述,所举实例只用于解释本实用新型,并非用于限定本实用新型的范围。
34.实施例1
35.本实施例中,主要介绍核心结构。
36.参照附图1所示,本实施例中的一种爬拱吊机牵引锚固系统,包括,钢梁9,所述钢梁9形成带有宽度和长度的支撑面;
37.轨道梁2,沿所述钢梁9的长度方向,所述轨道梁2铺设于所述钢梁9上,并通过所述支撑面进行支撑;
38.爬拱吊机1,所述爬拱吊机1设置于所述轨道梁2上,且所述爬拱吊机1底部设置有沿所述轨道梁2运动的行走机构10;
39.锚固机构7,所述锚固机构7设置有第一动力机构6,所述第一动力机构6驱动锚固机构7以及位于锚固机构7上的传动组件3,进而通过传动组件3,带动轨道梁运动,以实现轨道梁沿钢梁上的移动。
40.本实施例中,通过增加锚固机构,在轨道进行移动时,锚固机构能够提供动力,使其在完成一段的施工后,能够继续进行移动,挪动到下一段中,实现对于下一段的施工。
41.本实施例中,增加了传动组件,进而传动组件,连接了锚固机构和爬拱吊机,在爬拱吊机进行移动或者换位时,能够抵消爬拱吊机的下滑力,防止爬拱吊机倾覆。
42.本实施例中,通过拽拉轨道的方法最大限度的利用了轨道梁,避免了在钢结构桥面上重新建立一条钢轨道,直接减少了轨道的材料和建设成本,拆装方便,节约时间,大大提升了工效,同时在爬拱吊机吊装作业过程中,还可以通过钢绞线稳固爬拱吊机,保证吊装作业安全。
43.实施例2
44.本实施例中,主要介绍连接关系。
45.参照附图1所示,还包括位于爬拱吊机1前方的行走千斤顶8,所述爬拱吊机1在所述行走千斤顶8的作用下,沿所述轨道梁2移动。
46.本实施例中,利用行走千斤顶,能够带动爬拱吊机在完成一段的施工后,使得爬拱吊机在轨道梁上进行移动,进行下一段的爬拱吊机起吊施工等。
47.进一步地,沿所述钢梁9,所述锚固机构7设置于爬拱吊机1远离行走千斤顶8的方向,且所述锚固机构7设置于所述轨道梁2移动方向的反向位置上。
48.本实施例中,锚固机构远离行走千斤顶设置,进而两者具有一定的拉扯力,此时在爬拱吊机移动时,锚固机构产生与之移动相反的力,进行形成拉扯力,能够防止倾覆。
49.具体地,还包括位于爬拱吊机1与锚固机构7之间的剪力柱4,所述剪力柱4穿过所述传动组件3设置于所述钢梁9上。
50.本实施例中,爬拱吊机和锚固机构的运动中,承受的力比较大,且对于传动组件而言,一般选用绳索等,此时需要考虑垂直方向的受力以及支撑,剪力柱的增加,承受上述爬拱或锚固中的荷载。具体地,剪力柱为柱状的墙体结构。
51.参照附图1所示,还包括靠近锚固机构7设置的剪力柱加劲板5,所述剪力柱加劲板5位于所述传动组件3与所述钢梁9之间。
52.本实施例中,增加剪力柱加劲板,其设置在钢梁和传动组件之间,使得传动组件在水平上有一定的支撑,且其呈梯形设置,使得剪力柱的侧部进一步强度增加。
53.进一步地,所述剪力柱加劲板5一侧与所述剪力柱4贴合,另一侧形成带有引导面
的斜面结构。
54.本技术方案中,剪力柱加劲板设置成斜面使得形成倾斜的支撑力,增加了强度的支撑。在进行爬拱吊机吊装作业或锚固机构时,可以形成斜向的力,实现力的均衡。
55.参照附图1所示,所述传动组件3为钢绞绳组件,所述钢绞绳组件与所述轨道梁2连接后,穿过所述锚固机构7并固定于所述第一动力机构6上。
56.本实施例中,传动组件穿过锚固机构设置,进而在轨道梁运动中,其与轨道梁和锚固机构的连接更加牢固,不会断开,稳定性更好。
57.参照附图1所示,还包括爬拱吊机1与锚固机构7连接的连接件11,所述连接件11位于传动组件3上方,且所述连接件11连接有第二动力机构12。
58.本实施例中,连接件设置在上方,传动组件设置在下方,形成两层的连接线,进而在拉扯或移动中,上下两处进行连接,形成面积更大的联结力,进而防倾覆效果更好。
59.更进一步地,所述第二机构12为千斤顶,所述第二动力机构12位于第一动力机构6上方,且所述传动组件3以及连接件11形成防倾覆结构。
60.本实施例中,两个动力机构也分别上下设置,进而使得传动组件和连接件均具有一定的拉扯点,使得其拉扯时,承受力更大。
61.参照附图所示,所述锚固机构7包括用于连接轨道钢梁的连接梁71、拽拉器72、锚固夹片73以及第一动力机构6,使用时,锚固夹片形成夹持,夹住待锚固的组件,然后利用拽拉器带动整个夹持进行拽拉等运动,同时拽拉器拉动整个轨道钢梁,完成其移动。
62.进一步地,行走机构10设置于轨道梁和爬拱吊机之间,轨道梁移动后,靠近71.实现轨道梁之间的连接。
63.实施例3
64.本实施例中,主要结合产品进行介绍。
65.参照附图1-2所示,本发明为一种爬拱吊机牵引锚固系统,由以下5部分组成:爬拱吊机1以及其后轮箱,轨道梁2,钢绞线构成的传动组件3以及连接件11,剪力柱4,剪力柱加劲板5,千斤顶构成的第一动力机构6以及第二动力机构12,锚固机构7,走行千斤顶8和钢梁9。具体参见附图。
66.本装置通过钢绞线连接锚固机构和爬拱吊机后轮箱,轨道梁;在爬拱吊机通过自身竖向千斤顶脱空后,通过锚固机构中的千斤顶拽拉钢绞线即可实现轨道移动;在爬拱吊机吊装作业时,张拉钢绞线以抵消爬拱吊机下滑力,防止爬拱吊机倾覆;爬拱吊机通过锚固在轨道梁上的走行千斤顶实现爬拱吊机行走,走行千斤顶单次行程30cm,行程到位后走行千斤顶需要前移换孔,在换孔过程中,张拉钢绞线抵消爬拱吊机下滑力,防止爬拱吊机倾覆。具体地,在进行爬拱吊机吊装或走行机构行程到位后,行走千斤顶需要前移换孔,在换孔过程中,锚固机构中的拽拉器通过施力,使得钢丝绳产生朝向爬拱吊机的张力,进而与朝下的力相抵消,,避免了倾覆。
67.本发明通过拽拉轨道的方法最大限度的利用了轨道梁,避免了在钢结构桥面上重新建立一条钢轨道,直接减少了轨道的材料和建设成本,拆装方便,节约时间,大大提升了工效,同时在爬拱吊机吊装作业过程中,还可以通过钢绞线稳固爬拱吊机,保证吊装作业安全。
68.上文所列出的一系列的详细说明仅仅是针对本实用新型的可行性实施方式的具
体说明,它们并非用以限制本实用新型的保护范围,凡未脱离本实用新型技艺精神所作的等效实施方式或变更均应包含在本实用新型的保护范围之内。
69.对于本领域技术人员而言,显然本实用新型不限于上述示范性实施例的细节,而且在不背离本实用新型的精神或基本特征的情况下,能够以其他的具体形式实现本实用新型。因此,无论从哪一点来看,均应将实施例看作是示范性的,而且是非限制性的,本实用新型的范围由所附权利要求而不是上述说明限定,因此旨在将落在权利要求的等同要件的含义和范围内的所有变化囊括在本实用新型内。不应将权利要求中的任何附图标记视为限制所涉及的权利要求。
70.此外,应当理解,虽然本说明书按照实施方式加以描述,但并非每个实施方式仅包含一个独立的技术方案,说明书的这种叙述方式仅仅是为清楚起见,本领域技术人员应当将说明书作为一个整体,各实施例中的技术方案也可以经适当组合,形成本领域技术人员可以理解的其他实施方式。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1