一种免清洗的全自动食品制作设备的制作方法
1.本实用新型涉及自动食品制作设备技术领域,具体涉及一种免清洗的全自动食品制作设备。
背景技术:
2.例如酸奶、冰淇淋等甜点均是备受现代人喜爱的小吃食品,在酸奶或冰淇淋中添加麦片、水果、果酱和各种撒料的搭配更是越来越收到年轻人和儿童的喜欢,这种搭配下的小吃食品不仅营养全面,而且口感层次丰富,其市场前景极好;
3.现代化工厂大批量生产可以提供酸奶或冰淇淋的搭配食品,但是往往是灭活后的产物,营养大打折扣;而全程冷藏保鲜的视频,也只能在特定零售场所才可以买到;另外,大规模生产,无可避免的涉及到防腐和食品添加剂的问题,尤其是无法添加新鲜水果等新鲜食材;而且品种有限,无法按照个人口味实现定制;
4.家庭手工制作是选项之一,但是费时费力,很多家庭也无法备全所有食材,只有少数家庭可以常常自己制作这种小吃;
5.由于以上原因,城市出现了一些专门的酸奶店或者水果捞店铺;但是这种店铺制作餐品仍然依靠简单的工具手工制作,需要耗费很多人工,品质不够稳定,食材的保鲜也不是封闭清洁的环境,且清理过程繁琐,卫生条件差,再加上高昂的租金和人工成本往往导致店铺很快就会倒闭;现如今市面上出现的无人冰淇淋机,只是将食品工厂流水线技术简单移植过来,实际使用起来,具有如下诸多缺陷:(1)固体配料采用螺杆式下料机构。螺杆式下料机构适合工厂流水线生产,用于无人售卖设备会带来一系列缺陷甚至食品安全风险。具体而言包括:a.无法拆除清洗;现场清洗,不仅繁琐,而且机构中的死角极难做到有效清洗;b.螺杆机构体积大,只能多种配料公用一个,无法避免串味问题;c.螺杆机构的特点,会挤压,压碎配料,只适合于粉末或者细碎颗粒配料;(2)其他液体配料采用固定腔体容器和泵式下料方案,仍然带来清洗难题和潜在食品安全风险。(3)其他形态的配料例如浓浆颗粒,糊状,现切水果等大颗粒,现有设备无法胜任。
技术实现要素:
6.针对现有技术中的缺陷,本实用新型提供免清洗的全自动食品制作设备,该装置经由主控制器控制机器全自动制作食物,创造性地解决了能适用于各类不规则形状固体颗粒食物和柔软水果的连续精确且微量下料问题;浓浆颗粒或者糊状食材取用装置以及液体食材取用装置中的储料仓和下料机构合为一体;固体食材取用装置为弹仓式装卸,机器免清洗,能实现精确取料,且料仓的结构紧凑,可实现快速拆装,便于设备运营维护。
7.一种免清洗的全自动食品制作设备,包括浓浆颗粒食材取用装置、自动接料装置、触控屏、主控制器,所述浓浆颗粒食材取用装置包括有推动装置、挤压板、装料盒、挤压仓,所述挤压仓内安设有若干装料盒,所述挤压仓的侧壁设有下料口,所述装料盒侧壁设有开口,所述推动装置的输出端连接有所述挤压板,所述挤压板与所述装料盒的开口适配;所述
自动接料装置用于接取浓浆颗粒食材取用装置下放的食材,所述触控屏用于顾客与设备进行人机交互,所述主控制器用于接收检测信号并发送控制信号。
8.作为优选的,还包括固体食材取用装置、液体食材取用装置,所述固体食材取用装置包括料筒、固定支架、柔性叶轮、叶轮驱动机构,所述料筒可拆卸地安设于所述固定支架上,所述柔性叶轮安设于所述料筒内部,所述叶轮驱动机构固定在所述固定支架上,所述叶轮驱动机构用于为所述柔性叶轮提供动能;所述液体食材取用装置包括置物架、蠕动泵,所述蠕动泵安设在所述置物架上。
9.作为优选的,所述固定支架包括矩形框、限位架,所述叶轮驱动机构安设于所述矩形框两侧顶部外壁,所述矩形框内水平安设有若干限位架,所述料筒的一侧外壁还设置有限位块,所述料筒通过所述限位块放置在所述限位架上。
10.作为优选的,所述限位架包括限位梁、拉环、弹簧销,所述限位梁包括横梁、竖梁,所述横梁的一侧与所述竖梁的一侧顶部外壁连接,所述拉环与所述弹簧销通过软钢丝连接,所述拉环与弹簧销均安设于所述横梁上,所述限位块与所述横梁抵接。
11.作为优选的,所述自动接料装置包括极坐标式机械臂、防落料托盘,所述防落料托盘安设于所述浓浆颗粒食材取用装置、固体食材取用装置、液体食材取用装置的底部,所述极坐标式机械臂与所述防落料托盘滑动连接。
12.作为优选的,所述极坐标式机械臂包括极坐标运动轨道、旋转机械臂,所述防落料托盘上开设有滑槽,所述极坐标运动轨道安设于所述防落料托盘底部,所述旋转机械臂安设的一端穿过所述滑槽与所述极坐标运动轨道连接,所述极坐标运动轨道与所述滑槽平行设置,所述旋转机械臂的旋转范围为固体食材取用装置、浓浆颗粒食材取用装置、液体食材取用装置的下料范围。
13.作为优选的,还包括管夹阀,所述管夹阀包括动力装置、滚轮、滚轮臂、拉销、阀体和活动板,所述拉销用于连接所述动力装置与所述阀体,所述阀体内设有滚轮,所述动力装置的输出端与所述滚轮固定连接,所述管夹阀靠近所述浓浆颗粒食材取用装置安设。
14.作为优选的,还包括物料供应装置,所述物料供应装置包括物料桶、供料托盘、推送装置、检测装置,所述物料桶内垂直设置有推送装置,所述推送装置的输出端设置有所述供料托盘,所述检测装置用于检测供料托盘内的物料与物料桶顶部内壁间的距离。
15.本实用新型的有益效果体现在:
16.本实用新型无需人工干预,顾客可通过触控屏进行自由定制,经由主控制器控制机器全自动制作食物,创造性地解决了能适用于各类不规则形状固体颗粒食物和柔软水果的连续精确且微量下料问题;浓浆颗粒食材取用装置以及液体食材取用装置中的储料仓和下料机构合为一体;固体食材取用装置为弹仓式装卸,机器免清洗,能实现精确取料,且料仓的结构紧凑,便于拆装;
17.本实用新型中的浓浆颗粒食材取用装置解决了固有流水线生产过程中只能连续生产以及固液体混合物质粘黏在设备上难以清洗的问题,并设有推动装置以实现精准下料;
18.本实用新型同时提出了一种大力,可调开启角度的管夹阀,能够实现各种粘稠度以及含颗粒物的酱汁下料控制;克服了传统电磁铁动力阀力量小、无法调节角度的问题,也克服了传统泵类需要清洗或无法输送高粘度液体的问题;
19.本实用新型还提出了一种极坐标式取料机械臂,重复精度高,尤其是动力通过一条细缝传出;实现一个大矩形平面上任意点运动取料,上面落料无法落入设备下面的动力和其他装置上,同时把全部动力结构隐藏在平面以下,安全,保证内部环境清洁便于清洗;保证操作人员安全;解决了传统多自由度仿人手机械臂或xy双轴滑台清洗困难的问题;且还能够实现下料时取料碗边下料边运动,实现摆盘效果,防止食物堆积;
20.本实用新型还提出了一种能够自动供应不规则和多种尺寸规格杯碗筷勺等物料的自动供应装置,解决了传统供料设备只能适用于特定规格物料的问题,适用场景更广泛。
附图说明
21.为了更清楚地说明本实用新型具体实施方式或现有技术中的技术方案,下面将对具体实施方式或现有技术描述中所需要使用的附图作简单地介绍。在所有附图中,类似的元件或部分一般由类似的附图标记标识。附图中,各元件或部分并不一定按照实际的比例绘制。
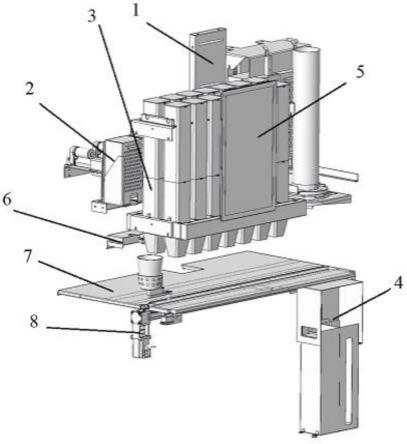
22.图1为本实用新型提供的一种免清洗的全自动食品制作设备的原理图;
23.图2为本实用新型提供的一种免清洗的全自动食品制作设备的液体食材取用装置的示意图;
24.图3为本实用新型提供的一种免清洗的全自动食品制作设备的浓浆颗粒食材取用装置的示意图;
25.图4为本实用新型提供的一种免清洗的全自动食品制作设备的浓浆颗粒食材取用装置的下料口位置的示意图;
26.图5为本实用新型提供的一种免清洗的全自动食品制作设备的固体食材取用装置的示意图;
27.图6为本实用新型提供的一种免清洗的全自动食品制作设备的料筒的示意图;
28.图7为本实用新型提供的一种免清洗的全自动食品制作设备的分配片结构的示意图;
29.图8为本实用新型提供的一种免清洗的全自动食品制作设备的分配片结构的工作原理示意图;
30.图9为本实用新型提供的一种免清洗的全自动食品制作设备的固定支架的示意图;
31.图10为本实用新型提供的一种免清洗的全自动食品制作设备的固定支架的叶轮驱动机构的示意图;
32.图11为本实用新型提供的一种免清洗的全自动食品制作设备的自动供应装置的示意图;
33.图12为本实用新型提供的一种免清洗的全自动食品制作设备的管夹阀的示意图;
34.图13为本实用新型提供的一种免清洗的全自动食品制作设备的管夹阀的工作原理示意图;
35.图14为本实用新型提供的一种免清洗的全自动食品制作设备的自动接料装置的示意图;
36.图15为本实用新型提供的一种免清洗的全自动食品制作设备的防落料托盘的示
意图;
37.图16为本实用新型提供的一种免清洗的全自动食品制作设备的柔性叶轮叶轮轴的示意图。
38.图示:1-液体食材取用装置;101-蠕动泵;102-置物架;2-浓浆颗粒食材取用装置;201-推动装置;202-挤压板;203-装料盒;204-挤压仓;205-下料口;3-固体食材取用装置;301-料筒;302-收拢支架;303-固定支架;3011-限位块;3012-柔性叶轮;3013-上分配片;3014-左下分配片;3015-右下分配片;3016-分配轴;3031-竖梁;3032-拉环;3033-横梁;3034-矩形框;3035-弹簧销;3036-叶轮驱动机构;4-自动供应装置;401-推送装置;402-供料托盘;403-物料桶;5-触控屏;6-管夹阀;601-动力装置;602-阀体;603-滚轮;604-拉销;7-自动接料装置;701-软膜;702-防落料托盘;8-极坐标式机械臂;801-极坐标运动轨道;802-旋转机械臂。
具体实施方式
39.下面将结合附图对本实用新型技术方案的实施例进行详细的描述。以下实施例仅用于更加清楚地说明本实用新型的技术方案,因此只作为示例,而不能以此来限制本实用新型的保护范围。
40.需要注意的是,除非另有说明,本技术使用的技术术语或者科学术语应当为本实用新型所属领域技术人员所理解的通常意义。
41.如图1、图3、图4所示,一种免清洗的全自动食品制作设备,浓浆颗粒食材取用装置2、自动接料装置7、触控屏5、主控制器,所述浓浆颗粒食材取用装置2包括有推动装置201、挤压板202、装料盒203、挤压仓204,所述挤压仓204内安设有若干装料盒203,所述挤压仓204的侧壁设有下料口205,所述装料盒203侧壁设有开口,所述推动装置201的输出端连接有所述挤压板202,所述挤压板202与所述装料盒203的开口适配;所述自动接料装置7用于接取浓浆颗粒食材取用装置2下放的食材,所述触控屏5用于操作人员与设备进行人机交互,所述主控制器用于接收检测信号并发送控制信号。
42.浓浆颗粒食材取用装置中,推动装置可与挤压仓连接,方便挤压板与装料盒能够更好地适配,推动装置可采用滑块式丝杆推杆,通过推动装置带动挤压板向装料盒中推动,将浓浆颗粒料从料包中挤出,料包自带的下料管从下料口处伸出,使浓浆颗粒的下料位置能够进行定制调节;当操作人员在触控屏上选择食品制作方式后,主控制器与设备中的电性元件均电性连接,主控制器接收触控屏发来的数据,通过接收顾客diy的食材配料数据生成菜谱,转换成机器控制信号,并向浓浆颗粒食材取用装置发送控制信号,控制推动装置动作,挤出浓浆颗粒食材,在设备中还可设置落碗装置,实现自动供应托碗的作用。
43.如图2、图5、图6所示,更为具体的,还包括固体食材取用装置3、液体食材取用装置1,所述固体食材取用装置3包括料筒301、固定支架303、柔性叶轮3012、叶轮驱动机构3036,所述料筒301可拆卸地安设于所述固定支架303上,所述柔性叶轮3012安设于所述料筒301内部,所述叶轮驱动机构3036固定在所述固定支架303上,所述叶轮驱动机构3036用于为所述柔性叶轮3012提供动能;所述液体食材取用装置1包括置物架102、蠕动泵101,所述蠕动泵101安设在所述置物架102上。
44.如图16所示,柔性叶轮的叶轮轴有与叶轮驱动机构轴相适配的齿轮,如图10所示,
在将料筒安设于支架上时,同时将柔性叶轮的叶轮轴与叶轮驱动机构轴衔接,以便于叶轮驱动机构转动时带动柔性叶轮转动,进行固体食材下料,料筒底部可设置成漏斗状,方便固体食材进行精准下料,避免固体食材在下料过程中洒落在托碗外部;液体食材取用时,将带有下料管的液体食材料包放置在置物架上,下料管的中段穿过蠕动泵;当操作人员在触控屏上选择食品制作方式后,主控制器接收到触控屏发来的数据,可向固体食材取用装置发送控制信号,控制叶轮驱动机构带动柔性叶轮转动,实现对固体食材的实时精准下料,还可向液体食材取用装置,控制蠕动泵进行动作,实现对液体食材的实时精准下料。
45.如图7所示,为防止叶轮下料时对软颗粒物料挤压力过大而导致物料被击碎,确保食物配料颗粒的完整性,还可料筒中安设分配片结构,分配片包括有上分配片、下分配片、分配轴,分配片结构位于柔性叶轮顶部,上分配片通过分配轴固定在料桶中,由倾斜的直边和圆弧型的下边组成,对称形状;下分配片由左下分配片、右下分配片组成,实际使用的时候,只要其中一片也能实现其功能,下分配片通过轴与上固定在料筒中,如图8所示,上,下分配片组合在一起,柔性叶轮的叶片与下分配片相贴,可以使桶中的固体配料进入桶中间位置,主要落入叶轮中间的2只叶片上;叶轮靠近桶壁的如图两侧区域将很少积累固体配料;左右下分配片圆弧长度刚好和叶轮有少许重叠,叶轮向左或者右旋转,会拨动左或者右下分配片。左或者右下分配片悬挂在分配片轴上,是活动的。可以绕轴旋转,幅度最多大约90度,其位置由下分配片上的2根销柱和上分配片限制;如图,初始时候,a区域没有或者只有很少固体配料。叶轮逆时针旋转时,一个叶片会拨动左下分配片,使之向上旋转一定角度,而且叶片是弹性体,所以叶片会越过左分配片逆时针旋转。由于分配片的阻挡,只有少量固体颗粒配料进入a区域,此时a区域的固体颗粒配料不会被叶片大力挤压,从而顺利从桶下口落出;叶轮有数量不定的多个叶片(应该大于4片以上),图中6个叶片,所以每旋转60度,将会有一个新的叶片拨动下分配片,使之后退,从而使少量固体颗粒配料进入a区域。当没有叶片拨动到下分配片时,由于重量作用,下分配片总是向下方旋转(绕轴),从而保持a区域没有或者只有少量固体颗粒配料积累;以上叶轮叶片和分配片周期性的相互作用,可以使a区域周期性的进入少量固体颗粒配料,从而避免了a区域堆满配料而被叶片挤压压坏。同理,由于对称性的设计,b区域的工作原理和a区域一样;如果叶轮只向一个方向运动,只要一个下分配片也是可以满足要求的。
46.如图9所示,更为具体的,所述固定支架303包括矩形框3034、限位架,所述叶轮驱动机构3036安设于所述矩形框3034两侧顶部外壁,所述矩形框3034内水平安设有若干限位架,所述料筒301的一侧外壁还设置有限位块3011,所述料筒301通过所述限位块3011放置在所述限位架上。
47.还可安设有与矩形框边缘同尺寸的u型收拢支架,当料筒长度较长时,可通过收拢支架对料筒中段处进行收拢固定,限位架之间的距离可设为与料筒的宽度相当,当料筒插入限位架之间时,料筒侧壁的限位块可防止料筒受重力影响掉落,且能使得料筒能水平取出。
48.如图9所示,更为具体的,所述限位架包括限位梁、拉环3032、弹簧销3035,所述限位梁包括横梁3033、竖梁3031,所述横梁3033的一侧与所述竖梁3031的一侧顶部外壁连接,所述拉环3032与所述弹簧销3035通过软钢丝连接,所述拉环3032与弹簧销3035均安设于所述横梁3033上,所述限位块3011与所述横梁3033抵接。
49.限位梁总体呈倒l型结构,横梁的设置便于限位块的放置以及拉环与弹簧销安设,横梁上设有用于拉环穿过的拉环孔以及弹簧销安设的弹簧孔,当弹簧销与拉环安设完毕后,拉环的一部分穿过拉环孔自横梁顶部外壁伸出,弹簧销的销体也自横梁顶部外壁伸出,由于拉环与弹簧销通过软钢丝连接,在向上拉动拉环时,弹簧销可随软钢丝的动作向下移动,从而使得料筒可在限位架缝隙之间水平移动,当将料筒放置在限位架缝隙之间时,先拉起拉环,使料筒能够在限位架上顺利移动,让叶轮轴与叶轮驱动机构轴进行衔接,再放下拉环,此时弹簧销伸出,卡住限位块的位置,使料筒不能再在限位架上进行水平移动,实现对料筒的限位固定效果;
50.并且,料筒的排布方式可采用两排分配,将两排料筒的叶轮轴与矩形框边缘设立的叶轮驱动机构轴进行匹配,能够对设备的空间位置进行有效利用。
51.如图10所示,更为具体的,所述自动接料装置7包括极坐标式机械臂8、防落料托盘702,所述防落料托盘702安设于所述浓浆颗粒食材取用装置2、固体食材取用装置3、液体食材取用装置1的底部,所述极坐标式机械臂8与所述防落料托盘702滑动连接。
52.如图14所示,更为具体的,所述极坐标式机械臂8包括极坐标运动轨道801、旋转机械臂802,所述防落料托盘702上开设有滑槽,所述极坐标运动轨道801安设于所述防落料托盘702底部,所述旋转机械臂802安设的一端穿过所述滑槽与所述极坐标运动轨道801连接,所述极坐标运动轨道801与所述滑槽平行设置,所述旋转机械臂802的旋转范围为固体食材取用装置3、浓浆颗粒食材取用装置2、液体食材取用装置1的下料范围。
53.旋转机械臂的竖直轴通过轴承座和极坐标运动轨道连接,极坐标运动轨道用于带动旋转机械臂在水平面上进行移动,旋转机械臂的驱动部位与极坐标运动轨道一同安设于防落料托盘底部,旋转机械臂的旋转轴从防落料托盘的缝隙伸出,旋转轴的一端可安设放置托碗的托架,机械轴的转动范围以及转动半径可依据实际操作需要设置,使旋转机械臂的旋转范围在固体食材取用装置、浓浆颗粒食材取用装置、液体食材取用装置的下料范围内,使得旋转机械臂能够顺利接料,极坐标运动轨道用于确定自动接料装置的水平x轴坐标,旋转机械臂用于确定自动接料装置的角度坐标θ,通过角度和x轴坐标(θ,x)可以准确将碗/杯托盘送到几个食材配料取用装置下方矩形区域中的任意位置,旋转机械臂水平臂上安装有光电传感器和称重传感器,杯/碗托盘安装在称重传感器上;
54.如图15所示,托盘的缝隙处边缘呈45
°
角,旋转机械臂的旋转轴从缝隙伸出,缝隙两侧边缘均设有压条,压条下压着软膜,软膜的长度足够发生重叠,且软膜的柔软度能使旋转轴的动作不受阻碍,设置软膜能够使掉落的食材不会落在防落料托盘下方设置的极坐标运动轨道上,并能够顺着45
°
斜角滑落至托盘内部,便于后续收集清理。
55.如图12所示,更为具体的,还包括管夹阀6,所述管夹阀6包括动力装置601、滚轮603、拉销604、阀体602,所述拉销604用于连接所述动力装置601与所述阀体602,所述阀体602内设有滚轮603,所述动力装置601的输出端与所述滚轮603固定连接,所述管夹阀6靠近所述浓浆颗粒食材取用装置2安设。
56.如13图所示,虚线为塑料软管,穿过阀体,从滚轮旁边穿过,管夹阀驱动机构可以使滚轮臂在0~90度之间转动,管夹阀的工作原理如下:
57.(1)管夹阀关闭状态:滚轮臂处于0度,滚轮把软管完全挤压到阀体侧壁,软管管壁内部贴合,间隙为0,表示软管被完全截流,内部流体无法流出。
58.(2)管夹阀全开状态:当滚轮臂处于90度时,软管被完全释放,内部流体可以流出。
59.(3)管夹阀任意角度状态:实际使用的时候,管夹阀的开启大小可调,具体可以按照流体粘度,颗粒物粒径等参数的需要在主控制器设置最大开启角度,设备主控制器控制管夹阀驱动机构旋转,带动滚轮臂,使滚轮臂处于0~90度之间的合适位置;软管为弹性体,其自然状态时管体会弹开到被滚轮阻碍的位置。
60.管夹阀的阀体通过拉销与动力装置连接,动力装置可为带齿轮的变速电机,电机的输出端与滚轮连接,当电机转动时,带动滚轮进行转动,能够实现对浓浆颗粒料包下料管进行夹紧和释放,实现流体阀门的作用,但无需担心流体阀门所存在的清洁问题。
61.如图11所示,更为具体的,还包括自动供应装置4,所述自动供应装置4包括物料桶403、供料托盘402、推送装置401、检测装置,所述物料桶403内垂直设置有推送装置401,所述推送装置401的输出端设置有所述供料托盘402,所述检测装置用于检测供料托盘402内的物料与物料桶403顶部内壁间的距离。
62.供料托盘上可放置杯盖、勺子等物料,当物料被取出一定数量后,检测装置检测到供料托盘内物料与物料桶顶部内壁间的距离增大,若检测到的距离增大到设定值范围,主控制器控制推送装置推动供料托盘上移,使物料与物料桶顶部内壁间的距离缩短到设定范围之内,能够保障客户方便实时取用供料托盘内的物料。
63.固体食材配料以完整料桶位单元,整体装卸,不会再现场直接装料,是整体在中央厨房装料和清洗的,这样才保证现场装卸的效率,以及机器内环境的清洁,将浓浆颗粒食材、固体食材和液体食材安放完毕后,客户通过触控屏进行操作,主控制器控制推动装置实现浓浆颗粒食材下料、控制叶轮驱动机构实现固体装置下料、控制蠕动泵实现液体食材下料,在下料器件,主控制器还控制极坐标机械臂带动托碗进行移动,按客户在触控屏上设定的要求接取浓浆颗粒食材、固体食材和液体食材,完成食品的制作;
64.为保障装置接料的准确性,可设置落杯/碗机构,落杯/碗机构用于自动落下杯/碗到杯碗托盘里,落杯/碗机构还可以设置红外传感器,红外传感器会判断是否落杯/碗成功,下方旋转机械臂上安设的承重传感器也可以协助判断是否落杯/碗成功;承重传感器实时称重所有落料装置的取料,做到精确取料。
65.后应说明的是:以上各实施例仅用以说明本实用新型的技术方案,而非对其限制;尽管参照前述各实施例对本实用新型进行了详细的说明,本领域的普通技术人员应当理解:其依然可以对前述各实施例所记载的技术方案进行修改,或者对其中部分或者全部技术特征进行等同替换;而这些修改或者替换,并不使相应技术方案的本质脱离本实用新型各实施例技术方案的范围,其均应涵盖在本实用新型的权利要求和说明书的范围当中。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1